-
Statika stavebních konstrukcí II., 3.ročník bakalářského
studia
Přednáška 8, zjednodušená deformační metoda (ZDM)
1
Katedra stavební mechanikyFakulta stavební, VŠB - Technická
univerzita Ostrava
• ZDM, základní předpoklady• Základní deformačně určitá soustava
(určení stupně přetvárné
neurčitosti)• Koncové účinky prutu, znaménková konvence• Koncové
momenty různě upnutého prutu• Složky vnitřních sil přímého prutu•
Styčníkové rovnice• Řešení rámu s neposuvnými styčníky ZDM
-
Základní předpoklady ZDM
Největší vliv na přetvoření konstrukcí mají ohybové momenty,
vliv normálových a posouvajících sil je zpravidla podstatně
menší.
Uvedeného poznatku se využívá ve ZDM zavedením
2
Uvedeného poznatku se využívá ve ZDM zavedením předpokladu, že
přetvoření každého prutu tvořícího konstrukci je vyvoláno jen
ohybovými momenty.
ZDM se využívá zpravidla pro řešení nosníků a rovinných
pravoúhlých rámů.
-
Základní deformačně určitá soustava, určení stupně přetvárné
neurčitosti np,z
Fiktivní vazby vložené do konstrukce brání deformaci
styčníků
a vytvářejí základní deformačně určitou soustavu.
Počet těchto vazeb určuje stupeň přetvárné neurčitosti np,z.
3
Fiktivní vazby:
� momentové (brání pootočení styčníku)
� silové (brání posunutí styčníku)
-
Volný styčník v rovinné konstrukci může mít max. tři fiktivní
vazby
Základní deformačně určitá soustava, určení stupně přetvárné
neurčitosti np,z
4
Při vkládání silových vazeb nutno ctít předpoklad o neměnné
délce prutu.
-
Příklady určování stupně přetvárné neurčitosti np,z[1]
5
np,z= 6
-
Koncové účinky prutu, znaménková konvence
Znaménková konvence
� normálových a posouvajících sil odpovídá silové
6
odpovídá silové metodě
� pro koncové momenty - na konci prutu jsou pravotočivé, tj.
působí ve smyslu pohybu hodinových ručiček
-
Koncové momenty prutu
Koncové momenty prutu závisí na:
� zatížení prutu (primární stav)
� deformaci prutu (sekundární stav) , abab MM∧∧
, baab MM
7
deformaci prutu (sekundární stav)
Výsledné momenty jsou dány superpozicí:
Pootočení konců prutu ab (styčníků) ϕa, ϕb a potočení prutu mají
směr pravotočivý.
ab
ab
ab
abab l
∆w
l
wwΨ =−=
, abab MM
abbaba
ababab
MMM
MMM∧
∧
+=
+=
-
Primární koncové momenty prutů
Primární koncové momenty prutů řešíme silovou metodou při
respektování:
� znaménkové konvence pro ZDM
připojení (oboustranně monolitické, pravostranně
8
� připojení (oboustranně monolitické, pravostranně
nebo levostranně kloubové)
Pro výpočty využíváme jejich tabelární zpracování.
-
Primární koncové momenty prutů [4]
9
-
Primární koncové momenty prutů [1]
10
-
Primární koncové momenty prutů [1]
11
-
Primární koncové momenty prutů [1]
12
-
Primární koncové momenty prutů [1]
13
-
Primární koncové momenty prutů [1]
14
-
Sekundární koncové momenty a posouvající síly, prut oboustranně
monoliticky připojený
K odvození lze využít lokální matici tuhosti prutu používanou v
ODM při respektování jiné znaménkové konvence.
aab u
EIEIEIEI
l
EA
l
EAX
612612
0000ˆ ** −
15
baba
abab
baba
abab
baab
bb
aa
bb
aa
ba
b
b
b
a
a
ba
ba
ba
ab
ab
MM
MM
VZ
VZ
XX
ww
ww
uu
w
u
w
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EA
l
EA
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
l
EI
M
Z
X
M
Z
ˆˆ
ˆˆ
ˆˆ
ˆˆ
0ˆˆ
0
460
260
6120
6120
0000
260
460
6120
6120
ˆ
ˆ
ˆ
ˆ
ˆ
ˆ
*
*
*
*
**
*
*
*
*
**
*
*
*
*
*
22
2323
22
2323
*
*
*
*
*
−=
−=
=
−=
==
−=
−=
=
=
==
⋅
−
−
−
−
−−−
==
ϕϕ
ϕϕ
ϕ
ϕ*abR
-
Po dosazení platí :
Sekundární koncové momenty a posouvající síly, prut oboustranně
monoliticky připojený
abbaabab
baab
*b
*b
*a
*a
*abab
Ψ(l
k
l
ww
l
EIV
l
EIw
l
EI
l
EIw
l
EIZV
6336332ˆ
612612ˆˆ
2
2323
−+−=
−−+−=
−−−−=−=
ϕϕϕϕ
ϕϕ
16
a obdobně:
kab … ohybová tuhost prutu ab stálého průřezu
( )
( )( )abbaabba
abbaab
ba
abbaabab
baab
*b
*b
*a
*a
*abab
ΨkM
Ψl
kV
Ψkl
ww
l
EIM
l
EIw
l
EI
l
EIw
l
EIMM
lll
32ˆ
633ˆ
32322ˆ
2646ˆˆ22
−+=
−+−=
−+=
−−+=
+++−−=−=
ϕϕ
ϕϕ
ϕϕϕϕ
ϕϕ
l
EIkab
2=
-
Jsou-li známy sekundární koncové momenty prutu,
lze sekundární posouvající síly odvodit i jinak:
abM∧
baM∧
Koncové posouvající síly, prut oboustranně monoliticky
připojený
17ab
baabbabaababba
ab
baababbaababab
l
MMVMMlV
l
MMVMMlV
∧∧∧∧∧∧
∧∧∧∧∧∧
+−=⇒=++
+−=⇒=++
0
0
abV∧
baV∧
abla b
-
abM baM
abV baVabl
a b0,abV 0,baV
a b
M M+
Koncové posouvající síly, prut oboustranně monoliticky
připojený
18
abM baM
abV∆ baV∆a b
abM baM
abV∆ baV∆a b
abM∧
baM∧
abV∧
a bbaV
∧
+
+
bababaababab
bababaababab
VVVVVV
VVVVVV∧∧
+=+=
∆+=∆+= 0,0,
-
MMV
MMMMVVVV
l
MMV
l
MM
l
MMVVVV
baabba
baabbaab
babababa
baabab
baabbaab
abababab
+−=+−+−=+=
+−=+−+−=+=
0,0,
0,0,
ˆˆˆ
ˆˆˆ
I zde platí princip superpozice:
Celkové koncové posouvající síly, prut oboustranně monoliticky
připojený
19
lV
llVVVV bababababa −=−−=+= 0,0,ˆ
Posouvající síly Vab,0, Vba,0 jsou posouvající síly při daném
zatížení prutu na uvolněném (prostém) nosníku. Posouvající síly lze
také vypočítat ze vztahů:
l
MMV
l
ΨkV
l
Ψk
l
MMVV
l
MMV
l
ΨkV
l
Ψk
l
MMVV
baabba
abbaabba
abbaab
baab
ba,ba
baabab
abbaabab
abbaab
baab
ab,ab
ˆˆ633633
ˆˆ633633
0
0
+−=−+−=−+−+−=
+−=−+−=−+−+−=
ϕϕϕϕ
ϕϕϕϕ
-
Koncové momenty,prut pravostranně kloubově připojený
Pro pravostranně kloubově připojený prut platí:
0ˆ === bababa MMM
Primární koncový moment je nenulový a musí respektovat
dané uložení, sekundární koncový moment lze odvodit ze M̂abM
20
dané uložení, sekundární koncový moment lze odvodit ze
vztahů pro oboustranně monoliticky připojený prut:abM̂
( )
abababaabab
abaabababa
aababbaabab
abababbaabba
k k´), Ψ(k´M
)Ψ(k)ΨΨ
(k)Ψ(kM
Ψ ΨkM
4
322
224
33
2
3
2232ˆ
2
3
2032ˆ
=−=
−=−+−=−+=
+−=⇒=−+=
∧ϕ
ϕϕϕϕϕ
ϕϕϕϕ
Nebo taky kde
-
Celkové posouvající síly,pravostranně kloubově připojený
prut
MV
MMVVVV
l
MV
l
M
l
MVVVV
abababba
abab
abababababab
−=−−=+=
−=−−=+= 0,0,ˆ
ˆ
ˆˆ
I zde platí a dále:0ˆ === bababa MMM
21
l
MV
l
M
l
MVVVV abba
ababbaabbaba −=−−=+= 0,0,ˆ
l
EIkk´
l
Ψk´
l
MVV
l
Ψk´
l
MVV
abab
abaab
abba,ba
abaab
abab,ab
2
4
3
4
3
22
22
0
0
⋅==
−−−=
−−−=
ϕ
ϕ
Po dosazení lze posouvající síly vypočítat ze vztahů:
-
Koncové momenty a posouvající síly,prut levostranně kloubově
připojený
ΨkΨkM abbababbabba
ˆ
)22(´)22(4
3ˆ −=−= ϕϕ
V tomto případě je a dále:0ˆ === ababab MMM
22
l
Ψk
l
MVV
l
MV
l
M
l
MVVVV
l
Ψk
l
MVV
l
MV
l
M
l
MVVVV
abbabbababa
baba
bababaabbaba
abbabbaabab
baab
baba
abababab
)22(´
ˆ
)22(´
ˆ
0,
0,0,
0,
0,0,
−−−=
−=−−=+=
−−−=
−=−−=+=
∧
∧
ϕ
ϕ
-
Poměrná ohybová tuhost prutu
U prutu stálého průřezu (zejména při silovém zatížení) není
nutno počítat se skutečnou ohybovou tuhosti prutu kab, dále
označenou k*ab.
Jednodušší je počítat s poměrnou ohybovou tuhostí kab, pro
kterou platí: c
kcI
k ab *==
23
platí:
kde c je libovolná konstanta, neměnná pro celou konstrukci.
Výpočet se takto značně zjednodušuje. Vypočtená přetvoření ϕa,
ϕb, ψab všech prutů konstrukce jsou přitom relativní. U
deformačního zatížení se musí počítat se skutečnými
přetvořeními:
E
ckc
l
Ik ab
ab
abab 2
*==
Ψc
E Ψ
c
E
c
E *abba abba
2
2
2 ** === ϕϕϕϕ
-
Výpočet koncových normálových sil
Normálové síly v koncových průřezech prutů se řeší ze statických
podmínek rovnováhy
0 0 FVNF =+−⇒=∑
24
0 0
0 0
0 0
acab
acabia
azabac
azabaciz
axacab
axacabix
MM
MMM
FVN
FVNF
FVN
FVNF
−==+⇒=∑
−−==++⇒=∑
−==+−⇒=∑
-
Styčníkové rovnice
( )==∑ aai b,c,d,ei MM
Styčníkové rovnice ve ZDM vyjadřují momentové podmínky
rovnováhy.
25
( )
( )
( )0
32
224
3
32
=
−++=
−+=
−++=
=+++
ae
addaadadad
acbaacacac
abbaababab
aaeadacab
M
ΨkMM
ΨkMM
ΨkMM
MMMMM
ϕϕ
ϕ
ϕϕ
-
Příklad 10, rám s neposuvnými styčníky, zadání
Rám s neposuvnými styčníky je rám, který nemá v základní
deformačně určité soustavě fiktivní silové vazby. U takového rámu
sestavujeme pouze styčníkové rovnice, jejichž počet odpovídá
npz.
P = 4 kN P = 4 kNq = 0,5 kN/m
26
6.0
1.0 9.0 3.0 3.0
1
2
3
J
4 2J5f
a
2J
b
J
d cJ e
npz= 2 (ϕϕϕϕd, ϕϕϕϕe)
-
6.01
P = 4 kN
2
3
J
4 2J5f
2J
J
d c
P = 4 kN
J
q = 0,5 kN/m
e
Příklad 10, rám s neposuvnými styčníky, řešení, poměrné tuhosti
prutů
27
Ic
I
Ic
l
Ik
,I
Ic
l
Ik
I
Ic
l
Ik
I
Ic
l
Ik
24
824
6
2
33524
9
2
324
64
3
4
3
324
64
3
4
3
4
44
2
22
3
33
1
11
==⋅==
=⋅==
=⋅⋅==
=⋅⋅==
6.0
1.0 9.0 3.0 3.0
1 3
a b
-
Příklad 10, rám s neposuvnými styčníky, řešení, primární koncové
momenty
6.01
P = 4 kN
2
3
J
4 2J5f
2J
J
d c
P = 4 kN
J
q = 0,5 kN/m
e
28
kNm3648
1
8
1
kNm375,395,012
1
12
1
kNm414
0
0
4
22
5
2
−=⋅⋅−=−=−=
−=⋅⋅−=−=−=
−=⋅−=−=
==
==
PlMM
qlMM
PlM
MM
MM
ceec
edde
d
beeb
adda
6.0
1.0 9.0 3.0 3.0
1 3
a b
-
Příklad 10, rám s neposuvnými styčníky, řešení, sekundární
koncové momenty
6.01
P = 4 kN
2
3
J
4 2J5f
2J
J
d c
P = 4 kN
J
q = 0,5 kN/m
e
29
eeec
eeeeb
ededed
ededde
ddda
kM
kM
kM
kM
kM
ϕϕ
ϕϕϕ
ϕϕϕϕ
ϕϕϕϕ
ϕϕ
162ˆ
6232ˆ
)2(33,5)2(ˆ
)2(33,5)2(ˆ
62ˆ
4
3
2
2
1
==
=⋅==
+=+=
+=+=
==
6.0
1.0 9.0 3.0 3.0
1 3
a b
-
Příklad 10, rám s neposuvnými styčníky, řešení, styčníkové
rovnice
6.01
P = 4 kN
2
3
J
4 2J5f
2J
J
d c
P = 4 kN
J
q = 0,5 kN/m
e
30
0:0
:0
=++=
=+=
∑
∑
ecedebei
ddedadi
MMMM
MMMM
6.0
1.0 9.0 3.0 3.0
1 3
a b
-
625,0)375,3(433,566,106
0
−=−−−=−=++
=++
=+
dededd
ecedeb
ddeda
MM
MMM
MMM
ϕϕϕ
Příklad 10, rám s neposuvnými styčníky, řešení soustavy
rovnic
31
00565,0
03569,0
037566,3233,5
625,033,566,16
375,0)3(375,31666,1033,56
−=
−=
−=+
−=+
=−−−=−−=+++
e
d
ed
ed
ecedeede
dededd
MM
ϕ
ϕ
ϕϕ
ϕϕ
ϕϕϕϕ
-
Příklad 10, rám s neposuvnými styčníky, tabelární sestavení
soustavy rovnic
P = 4 kN
2
J
4 2J5f
2J
J
d c
P = 4 kN
J
q = 0,5 kN/m
e
32
FrK =⋅1 3
a b
eϕdϕ P.S.
)(2 432 kkk ++2k)(2 21 kk + 2k
eced MM −−ded MM −
-
kNm786,3)00565,0)03569,0(2(33,5375,3)2(
kNm214,0 )03569,0(3202
0
2
1
−=−+−+−=++=
−=−⋅⋅+=+=
=
eddede
ddada
ad
kMM
kMM
M
ϕϕ
ϕ
Příklad 10, rám s neposuvnými styčníky, řešení, koncové ohybové
momenty
330090,3124,3034,0
0,4786,3214,0
:Kontrola
kNm955,2)00565,0(83
kNm090,3)00565,0(1632
kNm034,0)00565,0(2302
kNm124,3))00565,0(203569,0(33,5375,3)2(
4
4
3
2
=−+−=++
=−=−−=+
=−+=+=
−=−+−=+=
−=−⋅+=+=
=−+−+=++=
ecedeb
deda
ecece
eecec
eebeb
ededed
MMM
MMM
kMM
kMM
kMM
kMM
d
ϕ
ϕ
ϕ
ϕϕ
-
kN324,29
124,3786,325,2
kN036,06
214,00
20,
10,
=+−−=+−=
=−−=−==
l
MMVV
l
MVVV
eddedede
daaddaad
Příklad 10, rám s neposuvnými styčníky, řešení, koncové
posouvající síly
34
kN006,06
034,00
kN977,16
955,2090,32
kN023,26
955,2090,32
kN176,29
124,3786,325,2
30,
40,
40,
20,
=−−=−==
−=+−−−=+−=
=+−−=+−=
−=+−−−=+−=
l
MVVV
l
MMVV
l
MMVV
l
MMVV
ebebbeeb
cececece
ceceecec
eddeeded
-
Příklad 10, rám s neposuvnými styčníky, řešení, normálové
síly
1
P = 4 kN
2
3
J
4 2J5f
2J
J
d c
P = 4 kN
J
q = 0,5 kN/m
e
0:0, =++−=∑ ebecedez NVVF
35
1 3
a b
kN042,0006,0036,0
kN199,4023,2176,2
0:0
0:0
,
,
=+=+=
−=−−=−=
=+−−=
=++−=
∑
∑
ebedec
ecedeb
ecebedex
ebecedez
V NN
V VN
NV NF
NVVF
kN036,0
kN324632424
0:0
0:0
,
,
==
−=−−=−−=
=+−=
=++=
∑
∑
dade
deda
dedadx
dadedz
VN
,, VP N
NVF
NVPF
-
)( kN 977,1
)( kN 199,4
)( kN 324,6
↑=−=
↑=−=
↑=−=
ebbz
daaz
VR
NR
NR
6.01
P = 4 kN
2
3
J
4 2J5f
2J
J
d c
P = 4 kN
J
q = 0,5 kN/m
e
Příklad 10, rám s neposuvnými styčníky, řešení, výpočet reakcí,
kontrola
36
0042,0006,0036,0:0
05,48977,1199,4324,692:0
)( kN 042,0
)( kN 006,0
)( kN 036,0
)( kN 977,1
=+−−=++=
=−−++=⋅−⋅−++=
→==
→−=−=
→−=−=
↑=−=
∑
∑
cxbxaxx
czbzazz
eccx
bebx
adax
cecz
RRRF
qPRRRF
NR
VR
VR
VR 6.0
1.0 9.0 3.0 3.0
1 3
a b
-
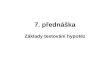
Příklad 10, rám s neposuvnými styčníky, průběh normálových
sil
+ +
0,0420,036
37
-6,324 -4,199
N
-
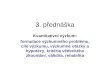
Příklad 10, rám s neposuvnými styčníky, průběh ohybových
momentů
++
x = 4,647
2,324 2,023
38
+ +
xn = 4,647
V
0,036 0,006
-4-2,176 -1,977
-
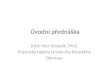
Příklad 10, rám s neposuvnými styčníky, průběh ohybových
momentů
-4
-3,090 -2,955-3,124-3,786
39
++ +
M
Mmax= 1,613
0,214 -0,034
2,977
-
Použitá literatura
[1] Kadlčák, J., Kytýr, J., Statika stavebních konstrukcí II.
VUTIUM, Brno 2001.
[4] Benda, J., a kol., Statika stavebních konstrukcí II.
Skriptum CERM, Brno 1996.
40