ANALISA RESPONS TRANSIENT
Respons transient : Kondisi awal Kondisi akhir
Respons steady-state : t
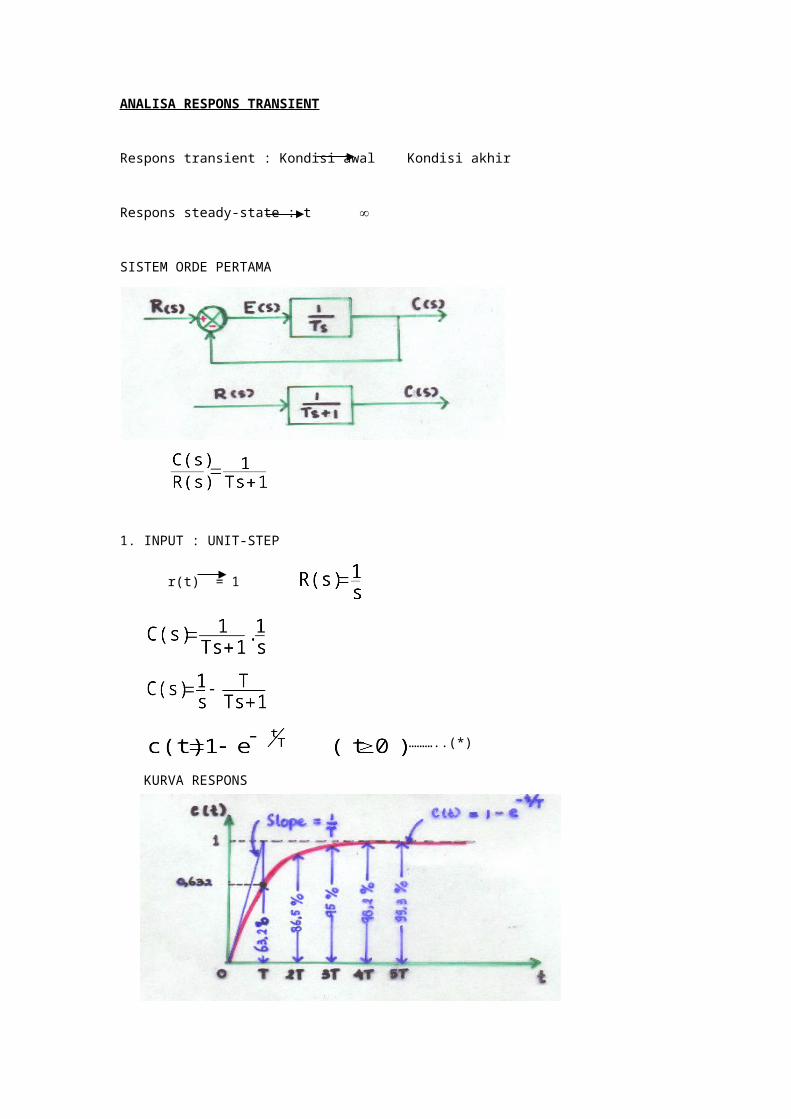
SISTEM ORDE PERTAMA
1. INPUT : UNIT-STEP
r(t) = 1
………..(*)
KURVA RESPONS
- Kondisi awal adalah 0 dan kondisi akhir adalah 1
- Pada t = T, c(t) = 0,632
T = time constant sistem
Time constant lebih kecil, respons sistem lebih cepat.
- Slope pada t = 0 adalah 1/T
Slope c(t) berkurang : 1/T pada t = 0 0 pada t =
- t = T : 0 – 63,2%
t = 2T : 0 – 86,5%
t = 3T : 0 – 95%
t = 4T : 0 – 98,2%
t = 5T : 0 – 99,3%
- t = steady state
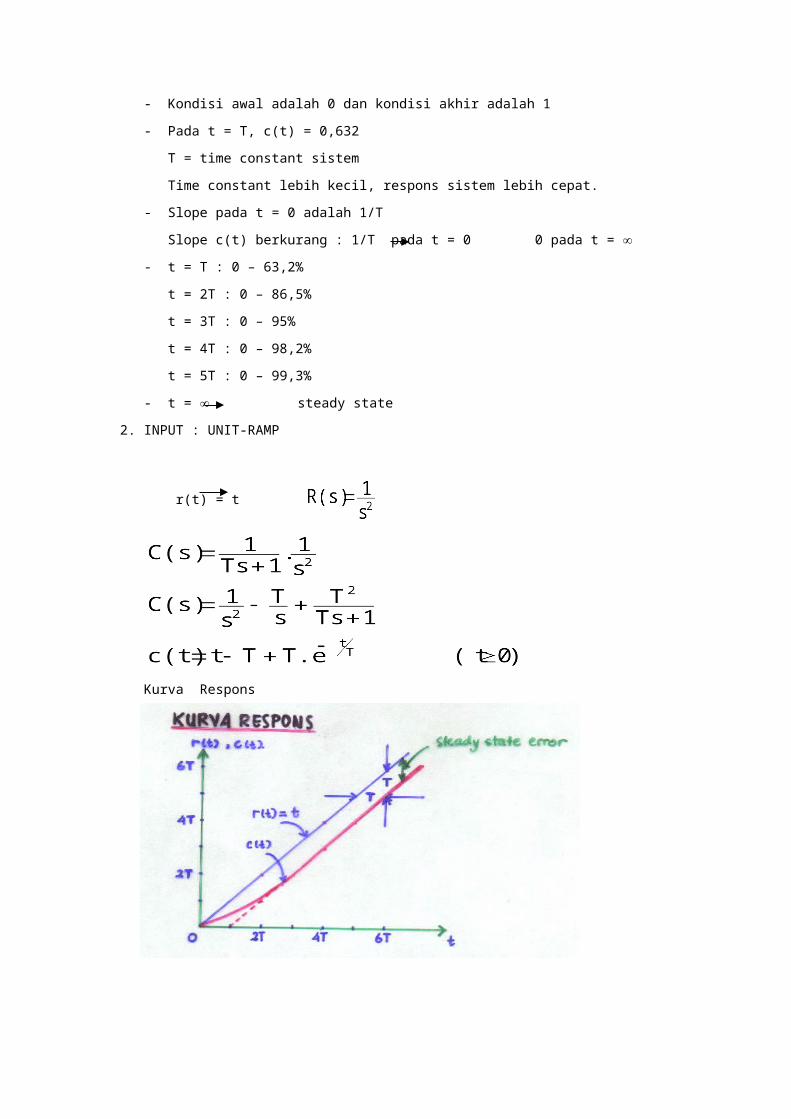
2. INPUT : UNIT-RAMP
r(t) = t
Kurva Respons
- Time constant lebih kecil ( T ) steady state error lebih kecil
3. INPUT : UNIT-IMPULSE
r(t) = S(t) R(s) = 1
C(s) = 1
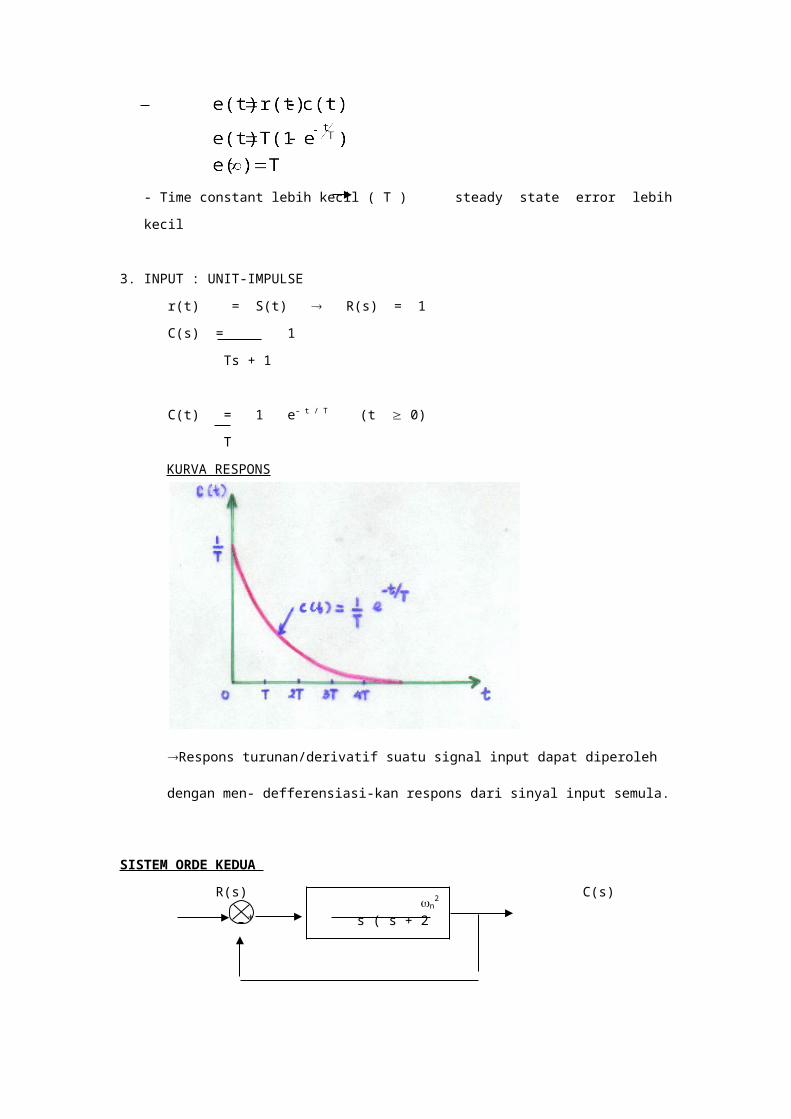
Ts + 1
C(t) = 1 e– t / T (t 0)
T
KURVA RESPONS
Respons turunan/derivatif suatu signal input dapat diperoleh dengan men- defferensiasi-kan
respons dari sinyal input semula.
SISTEM ORDE KEDUA R(s) E(s) C(s)
+
C(s) n2
=
R(s) S2 + 2 ζ n S + n2
n = frekuensi sudut natural undamped
ζ = faktor redaman
Sistem orde dua sangat tergantung pada faktor redaman (ζ). Bila 0 < ζ < 1, sistem
dinamakan underdamp. Bila ζ = 1, sistem disebut critically damp, dan bila ζ > 1, sistem
disebut overdamp.
Untuk mengetahui respons sistem orde dua, ketiga keadaan tersebut akan dibahas untuk
input yang berbentuk unit step, impuls, maupun ramp.
1 Input Unit Step
n2
s ( s + 2 ζ n )
R(s) = 1
S
Untuk sistem yang UNDERDAMP n
2 1
C(s) = S2 + 2 ζ n S + n
2 S
1 S + 2 ζ n
C(s) = S S2 + 2 ζ n S + n
2
d = n 1 – ζ2
= frekuensi natural teredam (damped natural frequency)
1 S + 2 ζ n
C(s) = S S2 + 2 ζ n S + ζ2n
2 - ζ2n
2 + d
2
1 – ζ2
1 S + 2 ζ n
= S (S + ζn)2 + d
2 - n2
+ + d2
1 – ζ2
1 S + 2 ζ n
= S (S + ζn)2 + (1 - ζ2) d
2 – (1 – ζ2) n2 + d
2
1 – ζ2
1 S + 2 ζ n
= S (S + ζn)2 + d
2
1 S + ζ n ζ n
= S (S + ζn)2 + d
2 (S + ζn)2 + d2
C(t) = 1 - e –ζn t cos dt - e –ζn t sin dt ζ 1 – ζ2
C(t) = 1 - e –ζn t ( cos dt + ζ sin dt ) (t 0)
1 – ζ2
e(t) = r(t) - c(t)
= e–ζn t ( cos dt + ζ sin dt ) (t 0)
1 – ζ2
Frekuensi osilasi transient adalah d, dan berubah dengan faktor redaman
(ζ)
Sinyal error berkelakuan seperti osilasi sinusoidal yang teredam. Pada
steady-state error (t = ~), error = 0
Bila ζ = 0 c(t) = 1 – cos nt (t 0) respons menjadi undamped dan
osilasi terus menerus tidak terbatas
Untuk Sistem yang CRITICALLY DAMPED
n2
C(s) = (S + n)2 S
= 1 - e–n t ( 1 + nt ) (t 0)
Respons transient tidak berosilasi
Untuk Sistem yang OVERDAMPED
n2
C(s) =
( S + ζ n + n 1 – ζ2 ) ( S + ζ n - n 1 – ζ2 ) S
1
c(t) = 1+ e –( ζ + ζ2 – 1) n t - 2 ζ2 – 1 (ζ + ζ2 – 1 )
1 e –( ζ + ζ2 – 1) n t
2 ζ2 – 1 (ζ + ζ2 – 1 )
Untuk mendapatkan C(s) di atas :
C(s) n2
= R(s) S2 + 2 ζ n S + n
2
C(s) n2
=R(s) (S + ζn + ζd) (S + ζn - ζd)
d = n 1 – ζ2
d = n j2 (ζ2 - 1)
d = n j ζ2 - 1
C(s) n2
=R(s) (S + ζn - n ζ2 – 1) (S + ζn + n ζ2 – 1)
n e –S1t e-S2t
c(t) = 1 + (t 0) 2 ζ2 – 1 S1 S2
dimana : S1 = (ζ + ζ2 – 1) n
S2 = (ζ - ζ2 – 1) n
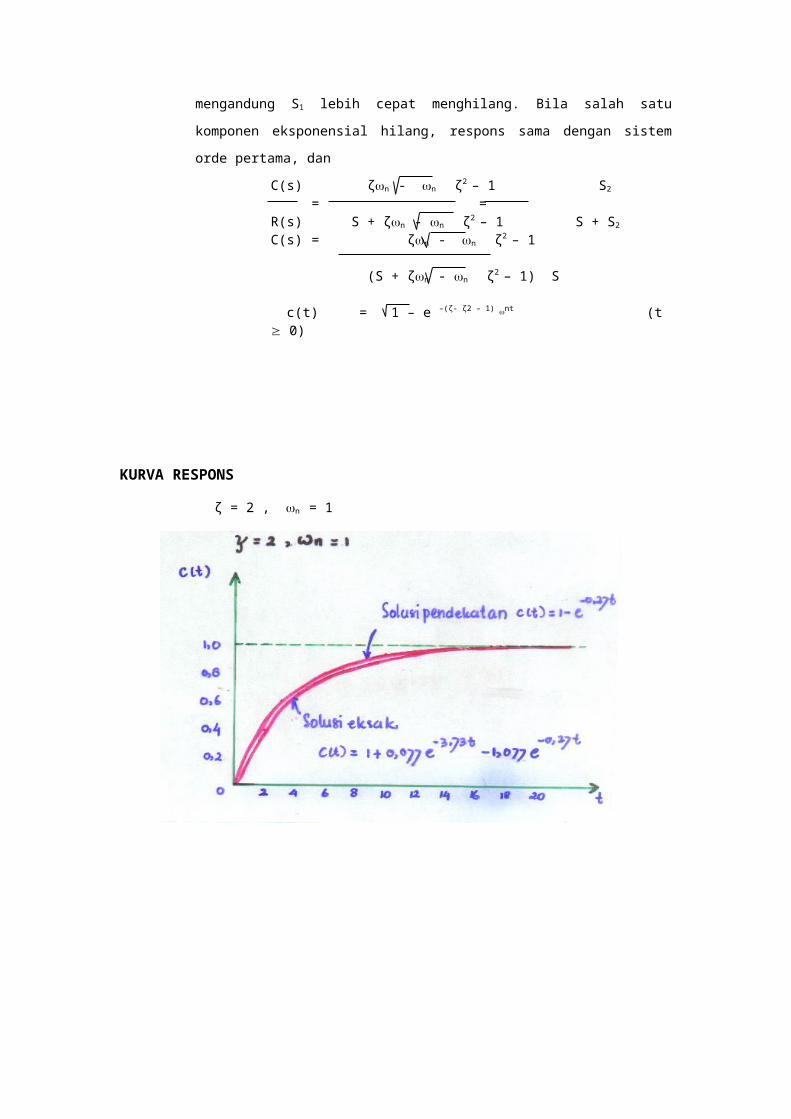
- Salah satu dari komponen yang dikandung c(t) akan menghilang lebih cepat
dalam respons. Dengan demikian komponen eksponensial tersebut dapat
diabaikan.
- Bila –S2 diletakkan lebih dekat terhadap sumbu j daripada –S1 (|S2| << |S1|),
maka solusi pendekatan -S1 diabaikan. Pengaruh -S1 pada respons lebh kecil,
karena komponen yang mengandung S1 lebih cepat menghilang. Bila salah satu
komponen eksponensial hilang, respons sama dengan sistem orde pertama, dan

C(s) ζn - n ζ2 – 1 S2
= =R(s) S + ζn - n ζ2 – 1 S + S2
C(s) = ζn - n ζ2 – 1
(S + ζn - n ζ2 – 1) S
c(t) = 1 – e –(ζ- ζ2 – 1) nt (t 0)
KURVA RESPONS
ζ = 2 , n = 1
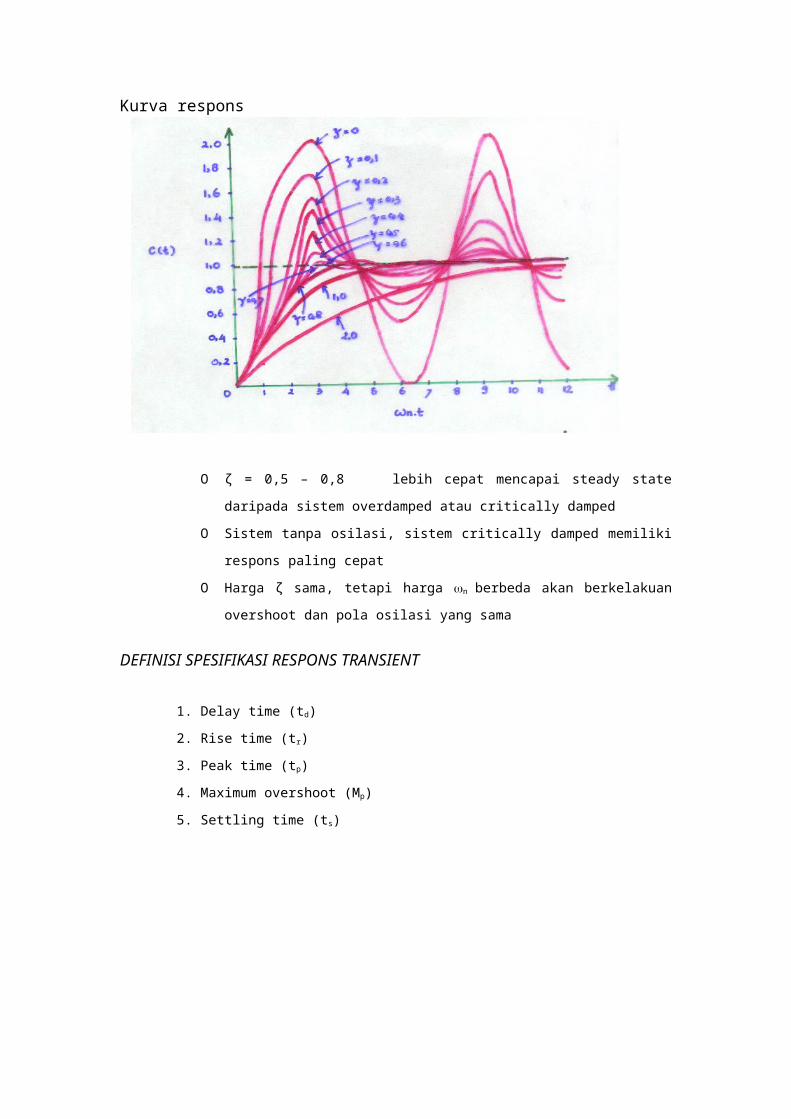
Kurva respons
O ζ = 0,5 – 0,8 lebih cepat mencapai steady state daripada sistem
overdamped atau critically damped
O Sistem tanpa osilasi, sistem critically damped memiliki respons paling cepat
O Harga ζ sama, tetapi harga n berbeda akan berkelakuan overshoot dan
pola osilasi yang sama
DEFINISI SPESIFIKASI RESPONS TRANSIENT
1. Delay time (td)
2. Rise time (tr)
3. Peak time (tp)
4. Maximum overshoot (Mp)
5. Settling time (ts)
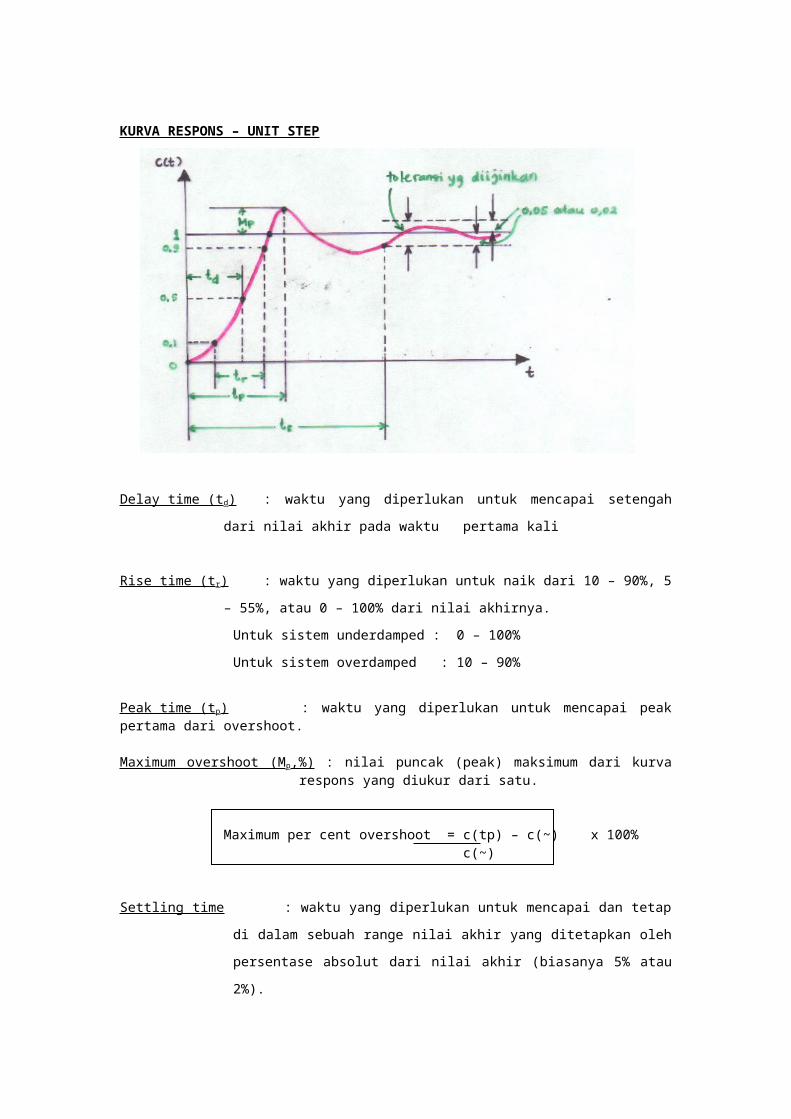
KURVA RESPONS – UNIT STEP
Delay time (td) : waktu yang diperlukan untuk mencapai setengah dari nilai akhir pada
waktu pertama kali
Rise time (tr) : waktu yang diperlukan untuk naik dari 10 – 90%, 5 – 55%, atau 0 – 100%
dari nilai akhirnya.
Untuk sistem underdamped : 0 – 100%
Untuk sistem overdamped : 10 – 90%
Peak time (tp) : waktu yang diperlukan untuk mencapai peak pertama dari overshoot.
Maximum overshoot (Mp,%) : nilai puncak (peak) maksimum dari kurva respons yang diukur dari satu.
Maximum per cent overshoot = c(tp) – c(~) x 100% c(~)
Settling time : waktu yang diperlukan untuk mencapai dan tetap di dalam sebuah range
nilai akhir yang ditetapkan oleh persentase absolut dari nilai akhir
(biasanya 5% atau 2%).
Diinginkan respons transient : - cukup cepat
- cukup memiliki redaman
(aplikasi : osilasi tidak dapat ditoleransi)
Respons transient yang diinginkan dari sistem orde kedua :
faktor redaman : antara 0,4 dan 0,8
Mendapatkan nilai dari tr, tp, Mp, dan ts
A. RISE TIME (tr) :
c(t) = 1 – e -ζn t( cosdt + ζ sin d t) 1 – ζ2
t = tr c(tr) = 1, maka:
c(tr) = 1 – e -ζn tr( cosdtr + ζ sin d tr) 1 – ζ2
karena e -ζn tr 0 maka :
cos d tr + ζ sin d tr = 0
1 – ζ2
atau
tan d tr = - 1 – ζ2
ζ
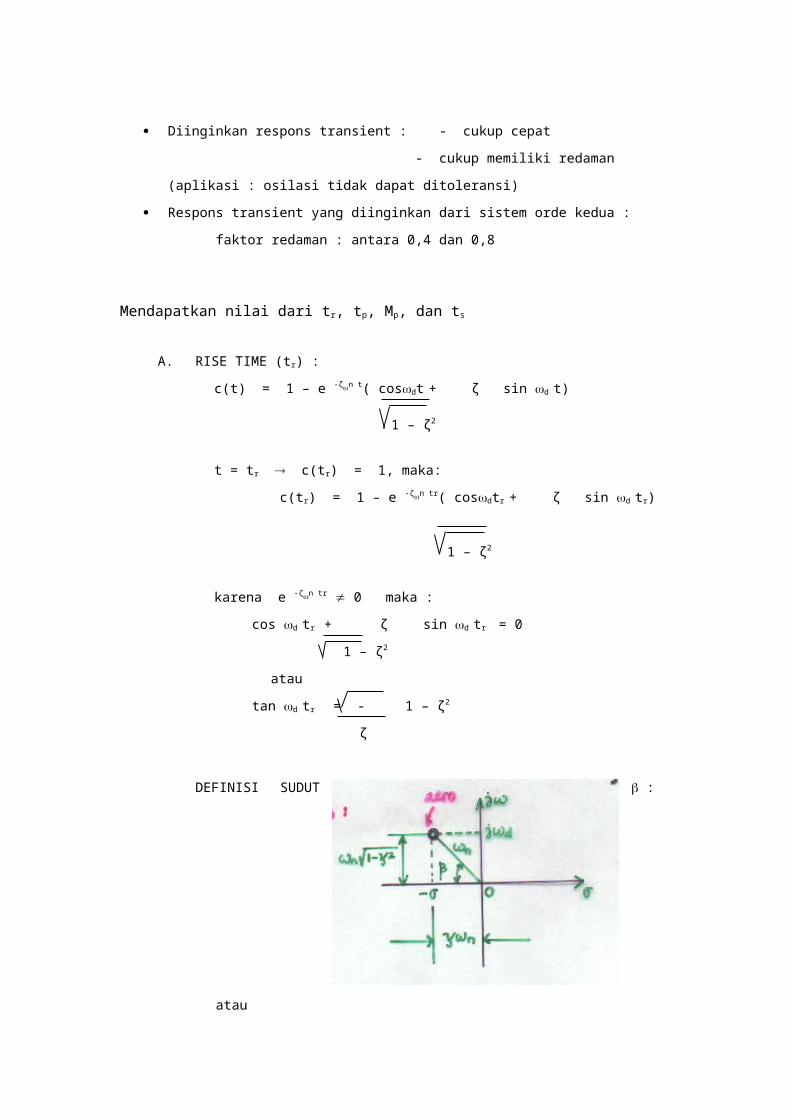
DEFINISI SUDUT :
atau
tan d
tr = _ d
Jadi,
tr =
POLE-POLE KOMPLEKS :
GARIS-GARIS FAKTOR REDAMAN KONSTAN
ζ = cos
B. PEAK TIME (tp) :
dc = (sin d tp) n e-ζn tp = 0
dt t = tp 1 - ζ
sin d tp = 0
d tp = 0, , 2, 3, …
d tp =
tp = d
C. MAXIMUM OVERSHOOT (Mp) :
Mp = c(tp) – 1
= - e-ζn( / d) (cos + ζ sin ) 1 – ζ2
= e-( / d)
= e-(ζ/ 1-ζ2 )
Maximum Overshoot (%) = e-( / d) x 100%
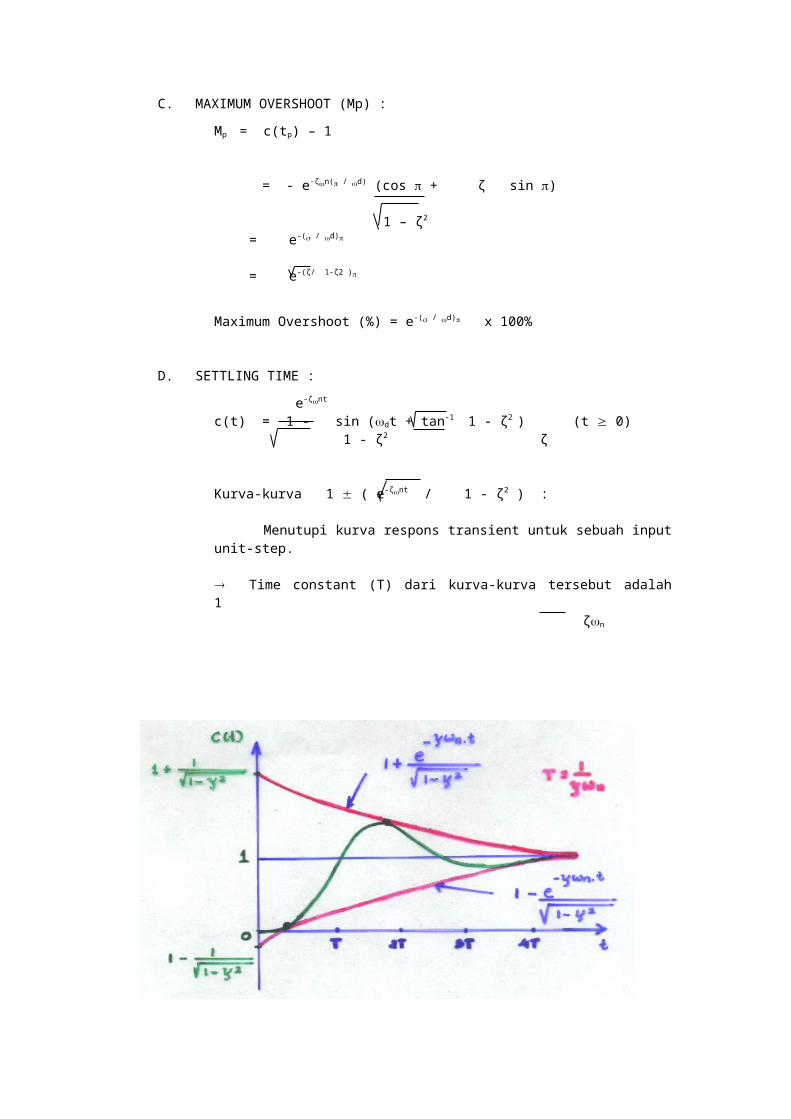
D. SETTLING TIME :
e-ζnt
c(t) = 1 - sin (dt + tan-1 1 - ζ2 ) (t 0) 1 - ζ2 ζ
Kurva-kurva 1 ( e-ζnt / 1 - ζ2 ) :
Menutupi kurva respons transient untuk sebuah input unit-step.
Time constant (T) dari kurva-kurva tersebut adalah 1 ζn

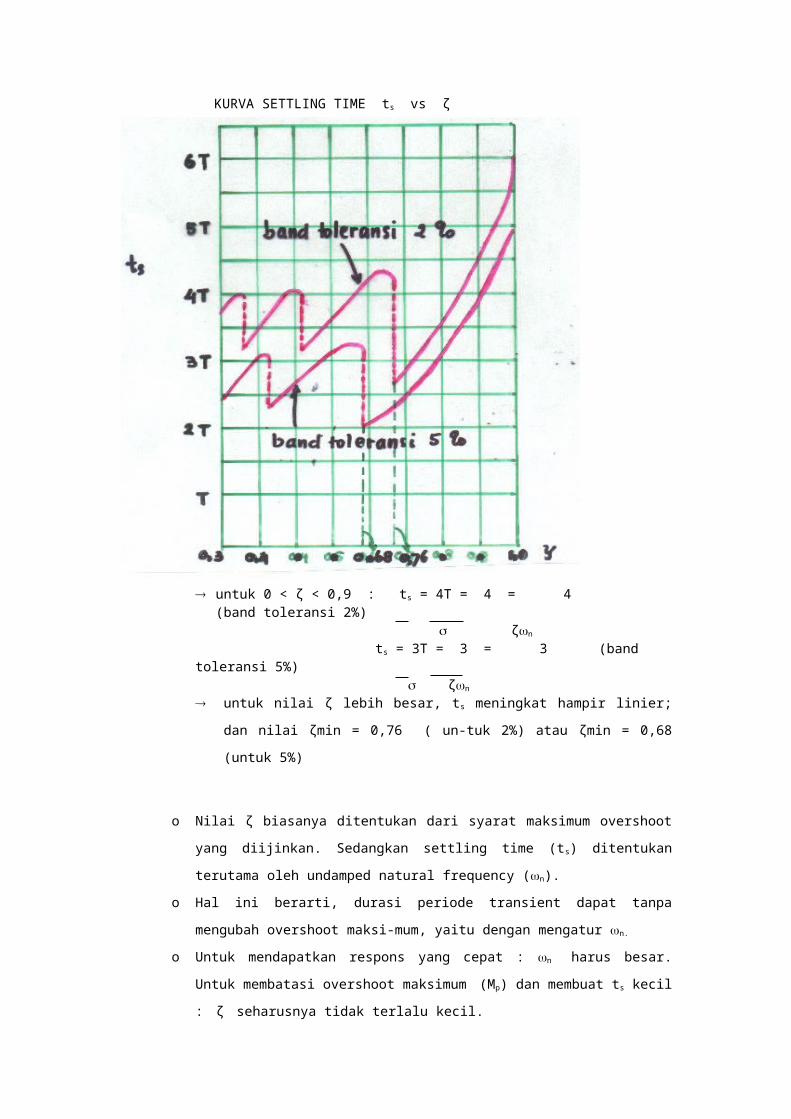
KURVA SETTLING TIME ts vs ζ
untuk 0 < ζ < 0,9 : ts = 4T = 4 = 4 (band toleransi 2%) ζn
ts = 3T = 3 = 3 (band toleransi 5%) ζn
untuk nilai ζ lebih besar, ts meningkat hampir linier; dan nilai ζmin = 0,76
( un-tuk 2%) atau ζmin = 0,68 (untuk 5%)
o Nilai ζ biasanya ditentukan dari syarat maksimum overshoot yang diijinkan.
Sedangkan settling time (ts) ditentukan terutama oleh undamped natural
frequency (n).
o Hal ini berarti, durasi periode transient dapat tanpa mengubah overshoot maksi-
mum, yaitu dengan mengatur n.
o Untuk mendapatkan respons yang cepat : n harus besar. Untuk membatasi
overshoot maksimum (Mp) dan membuat ts kecil : ζ seharusnya tidak terlalu
kecil.
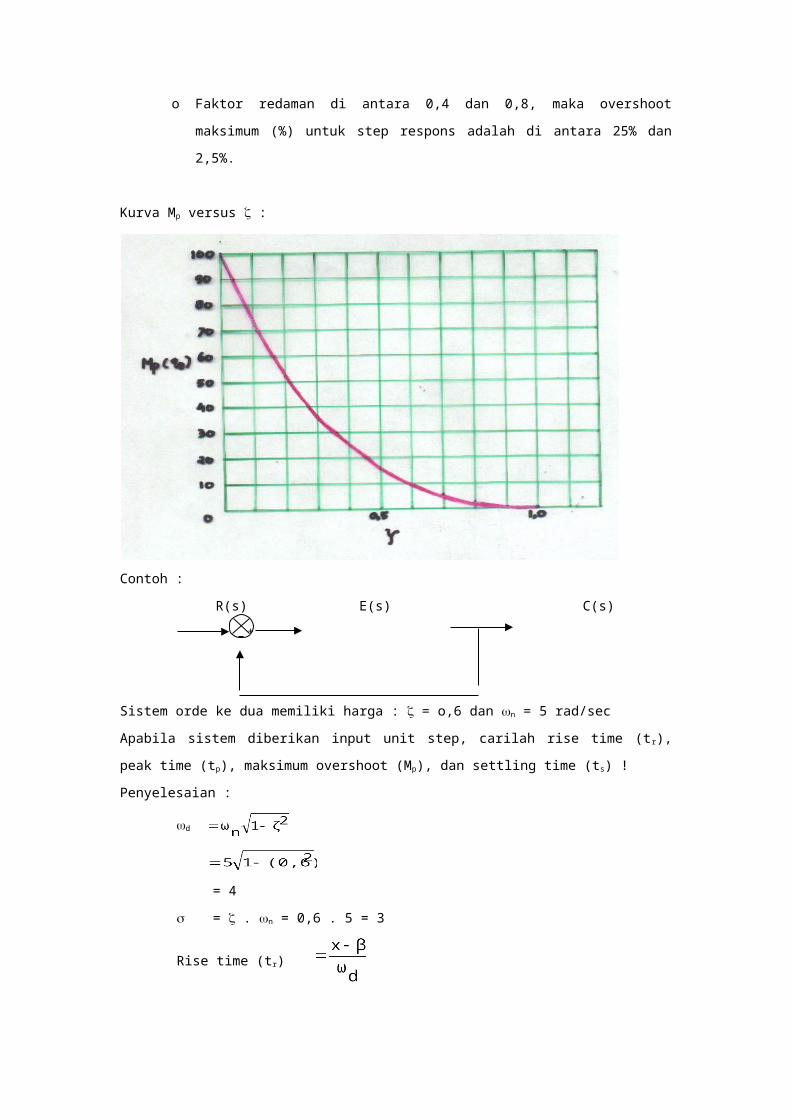
o Faktor redaman di antara 0,4 dan 0,8, maka overshoot maksimum (%) untuk
step respons adalah di antara 25% dan 2,5%.
Kurva Mp versus :
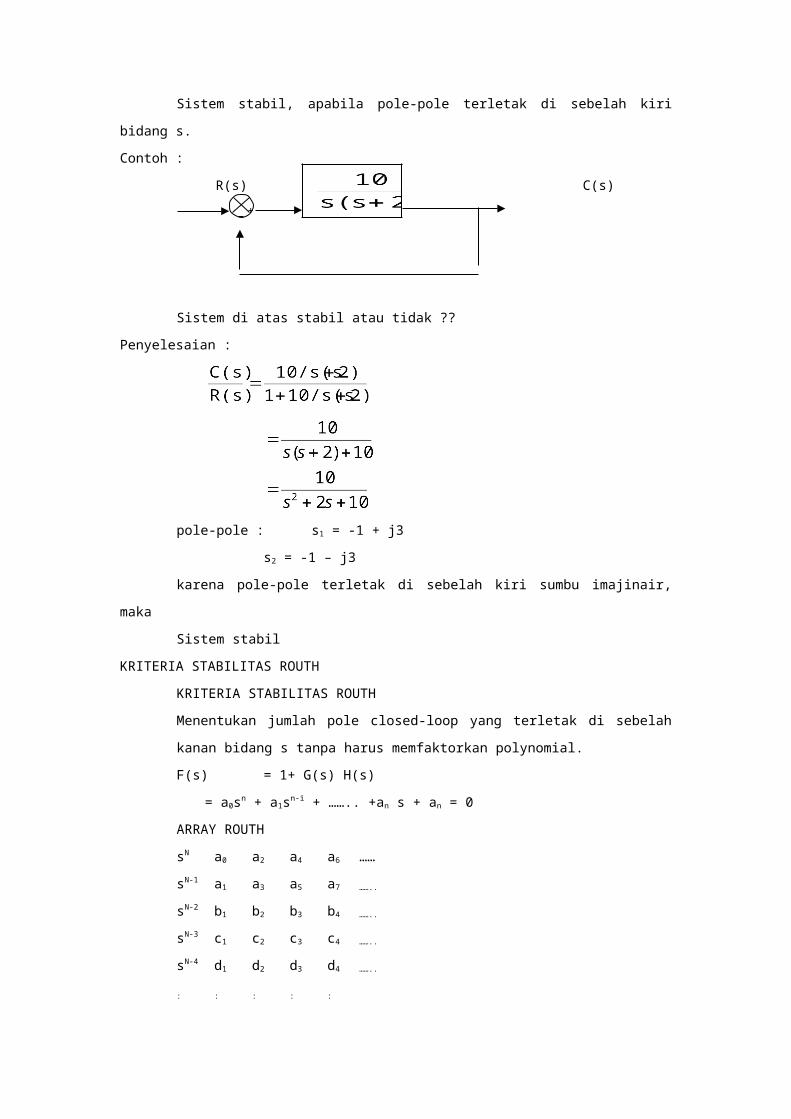
Contoh :
R(s) E(s) C(s) +
Sistem orde ke dua memiliki harga : = o,6 dan n = 5 rad/sec
Apabila sistem diberikan input unit step, carilah rise time (t r), peak time (tp), maksimum
overshoot (Mp), dan settling time (ts) !
Penyelesaian :
d
= 4
= . n = 0,6 . 5 = 3
Rise time (tr)
= tan -1
= tan-1 (4 / 3)
= 0,93 rad
tr =
= 0,55 sec
Peak Time (tp) = = sec
Maximum Overshoot (Mp) =
=
= 0,095
= 0,095 x 100%
= 95 %
Setting time (Ts) = sec (u/ kriteria 2%)
= sec (untuk kriteria 5%)
2 Input : unit –impulse
baca halaman 239-240
3 Input : unit-ramp
baca halaman 240-242
KRITERIA KESTABILAN ROUTH
STABILITAS SISTEM
Stabilitas suatu sistem closed-loop linier dapat ditentukan dari lokasi pole pole close
loop pada bidang s.
Sistem tidak stabil, apabila pole-pole tsb terletak di sebelah kanan bidang s.
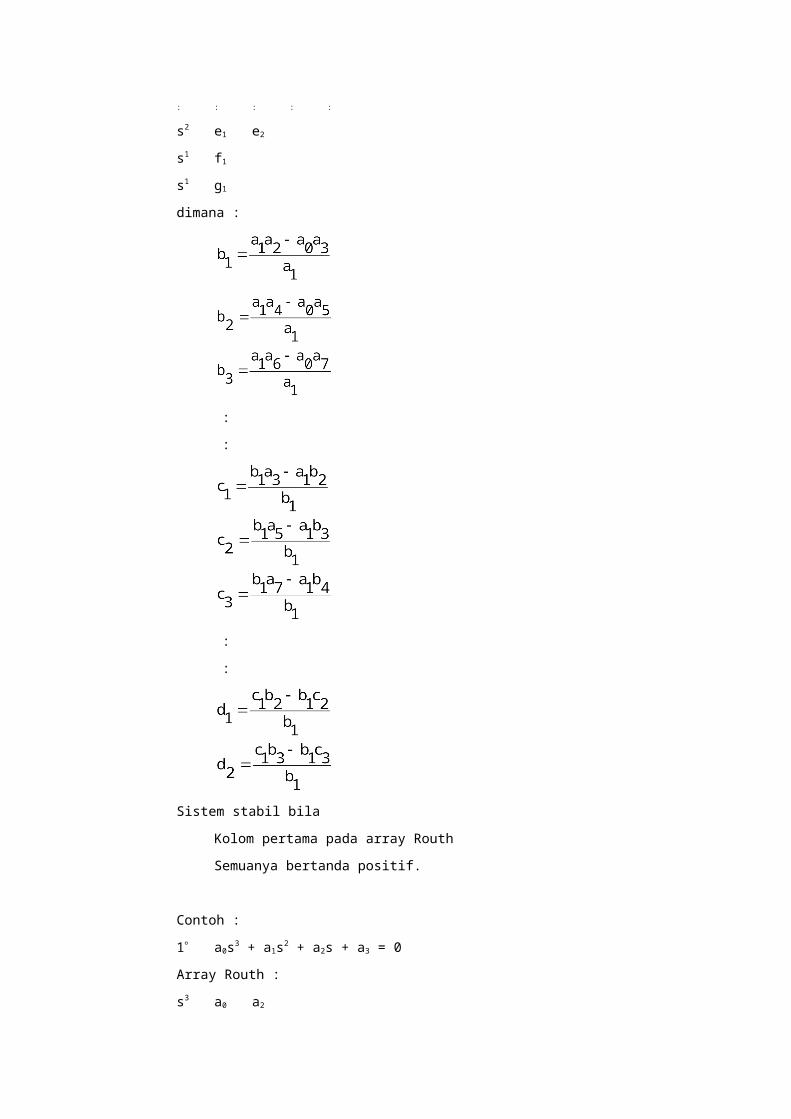
Sistem stabil, apabila pole-pole terletak di sebelah kiri bidang s.
Contoh :
R(s) C(s) +
Sistem di atas stabil atau tidak ??
Penyelesaian :
pole-pole : s1 = -1 + j3
s2 = -1 – j3
karena pole-pole terletak di sebelah kiri sumbu imajinair, maka
Sistem stabil
KRITERIA STABILITAS ROUTH
KRITERIA STABILITAS ROUTH
Menentukan jumlah pole closed-loop yang terletak di sebelah kanan bidang s tanpa
harus memfaktorkan polynomial.
F(s) = 1+ G(s) H(s)
= a0sn + a1sn-i + …….. +an s + an = 0
ARRAY ROUTH
sN a0 a2 a4 a6 ……
sN-1 a1 a3 a5 a7 ……..
sN-2 b1 b2 b3 b4 ……..
sN-3 c1 c2 c3 c4 ……..
sN-4 d1 d2 d3 d4 ……..
: : : : :
: : : : :
s2 e1 e2
s1 f1
s1 g1
dimana :
:
:

:
:
Sistem stabil bila
Kolom pertama pada array Routh
Semuanya bertanda positif.
Contoh :
1 a0s3 + a1s2 + a2s + a3 = 0
Array Routh :
s3 a0 a2
s2 a1 a3
s1
s0 a3
sistem stabil bila a1a2 > a0a3
2 s4 + 2s3 + 3s2 + 4s + 5 = 0
Array Routh :
s4 1 3 5
s3 2 4 0
s2 1 5
s1 -6
s0 5
sistem tidak stabil
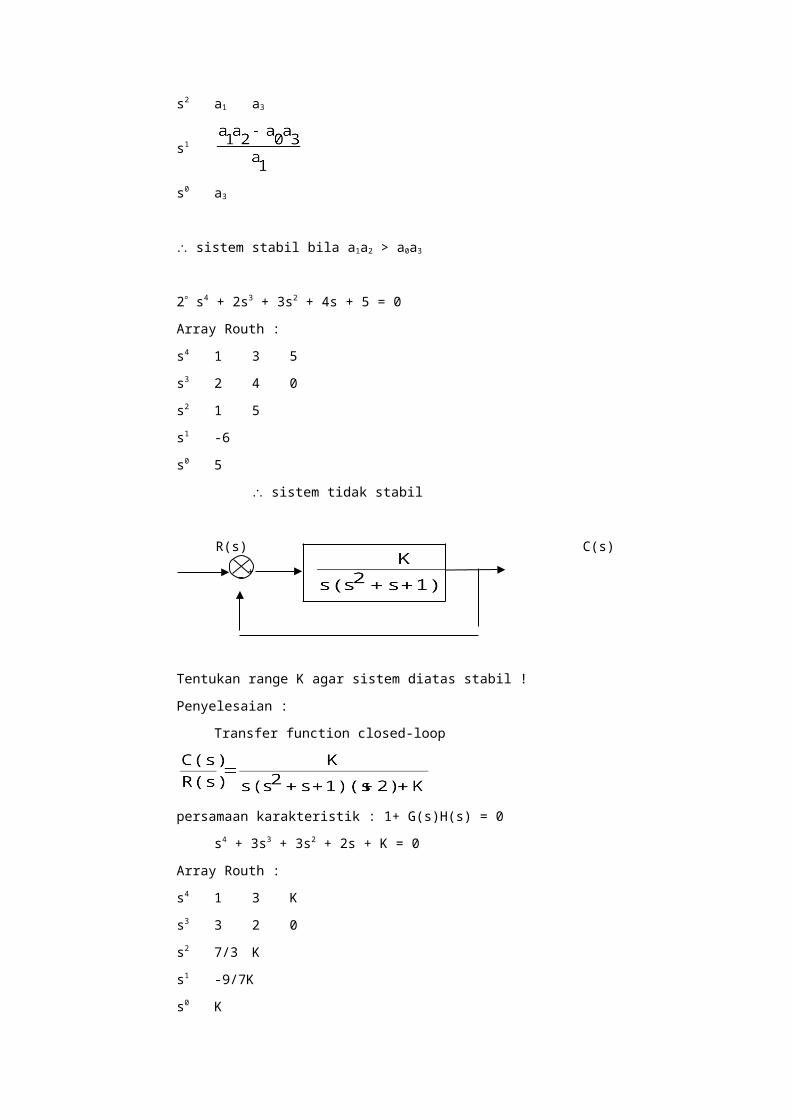
R(s) C(s) +
Tentukan range K agar sistem diatas stabil !
Penyelesaian :
Transfer function closed-loop
persamaan karakteristik : 1+ G(s)H(s) = 0
s4 + 3s3 + 3s2 + 2s + K = 0
Array Routh :
s4 1 3 K
s3 3 2 0
s2 7/3 K
s1 -9/7K
s0 K
agar sistem stabil : 14/9 > K > 0
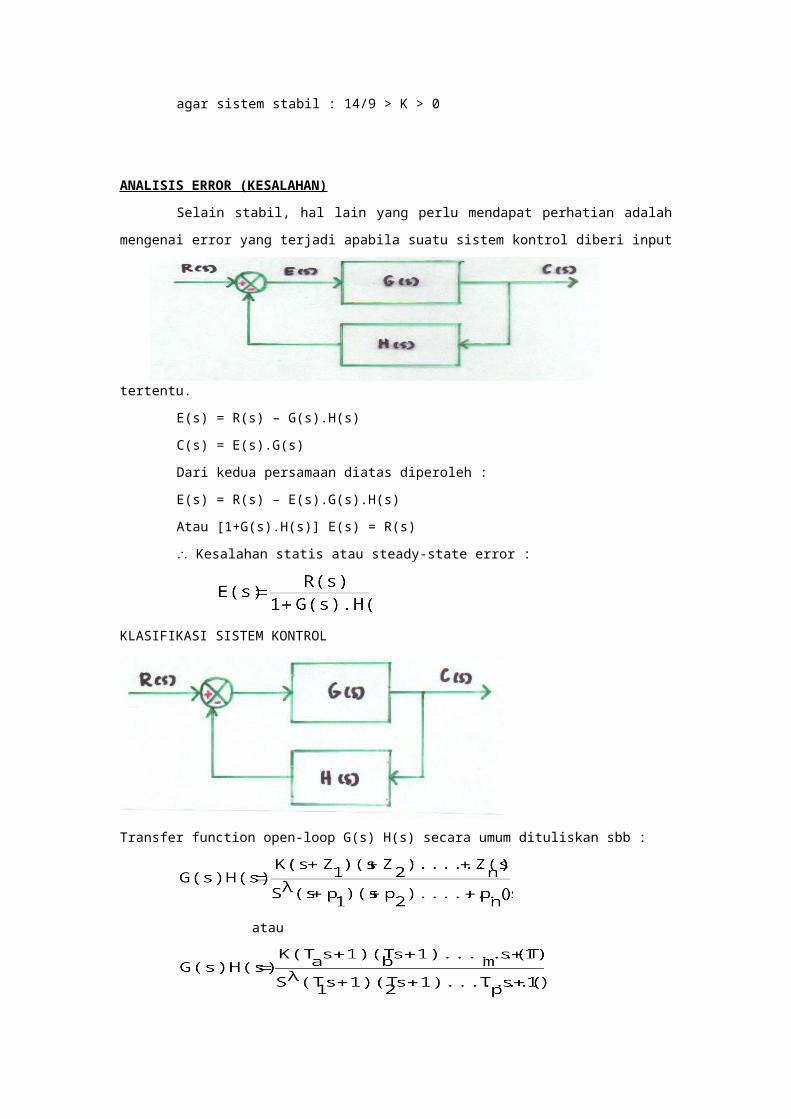
ANALISIS ERROR (KESALAHAN)Selain stabil, hal lain yang perlu mendapat perhatian adalah mengenai error yang
terjadi apabila suatu sistem kontrol diberi input tertentu.
E(s) = R(s) – G(s).H(s)
C(s) = E(s).G(s)
Dari kedua persamaan diatas diperoleh :
E(s) = R(s) – E(s).G(s).H(s)
Atau [1+G(s).H(s)] E(s) = R(s)
Kesalahan statis atau steady-state error :
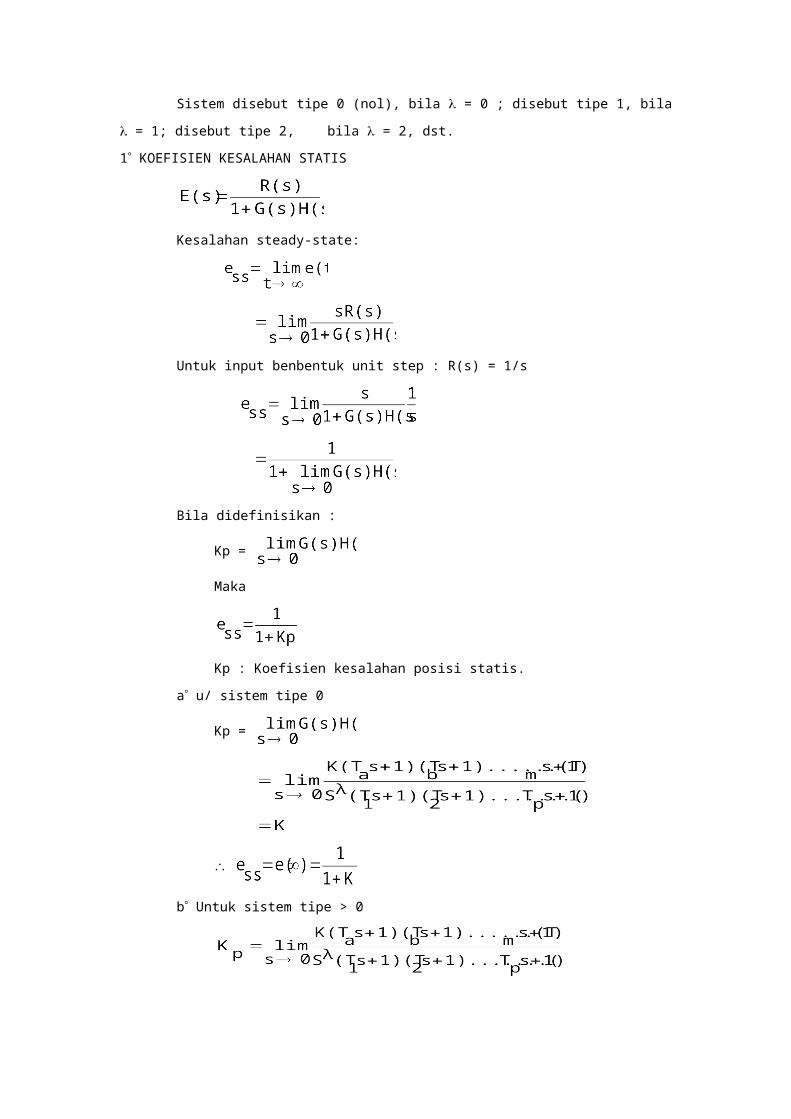
KLASIFIKASI SISTEM KONTROL
Transfer function open-loop G(s) H(s) secara umum dituliskan sbb :
atau
Sistem disebut tipe 0 (nol), bila = 0 ; disebut tipe 1, bila = 1; disebut tipe 2, bila
= 2, dst.
1 KOEFISIEN KESALAHAN STATIS
Kesalahan steady-state:
Untuk input benbentuk unit step : R(s) = 1/s
Bila didefinisikan :
Kp =
Maka
Kp : Koefisien kesalahan posisi statis.
a u/ sistem tipe 0
Kp =
b Untuk sistem tipe > 0
2 Koefisien Kesalahan Kecepatan Statis
Kesalahan steady-state
u/ Input berbentuk unit-ramp : R(s) =
Bila di definisikan :
maka :
Kv = koefisien kesalahan kecepatan statis
a u/ sistem tipe 0
Kp =
b u/ sistem tipe 1
= K
u/ Input Berbentuk Unit-Parabolik :
Bila didentifikasikan :
maka
Ka : Koefisien kesalahan percepatan statis
a u/ sistem tipe 0
b u/ sistem tipe 1
c u/ sistem tipe 2
d c u/ sistem tipe > 2
Latihan Soal :
(1)
R(s) C(s) +
Hitunglah kesalahan steady-state, bila input berbentuk :
a) step
b) ramp
c) parabolik
(2)
bila input r(t) = a.t (a > 0), maka tunjukkan bahwa e() dapat dibuat sama dengan 0
(nol) dengan mengubah harga KI !
Recommended