Embed Size (px)
Citation preview

1
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Федеральное государственное образовательное учреждение высшего профессионального образования
«Сибирский федеральный университет»
Авторы:
Супрун Л.И.
Супрун Е.Г.
Лошакова Н.Ю.
Начертательная геометрия и компьютерная графика
Конспект лекций
Красноярск
2008

2
Семестр 1. Лекция 1
Методы конструирования геометрических моделей
План лекции 1.Предмет и метод начертательной геометрии 2.Операция линейного проецирования 3.Метод двух изображений 4.Метод Монжа 5.Модель точки на эпюре Монжа
1. Предмет и метод начертательной геометрии
Активная деятельность человека связана с передачей и переработкой информации о явлениях внешнего мира. Причем одну и ту же информацию можно передать различными способами. Желая, например, определить форму и размеры проектируемого сооружения, можно использовать словесные объ яснения, математические символы, рисунок, чертеж, макет. Если различные физические предметы или явления позволяют извлекать одну и ту же инфор мацию, то говорят, что они моделируют друг друга. Каждый такой предмет является моделью других и наоборот. Так, например, азбуку Морзе можно считать однозначной моделью алфавита. Человек и имя, мысль и речь – при меры неоднозначных моделей.
Начертательная геометрия изучает способы конструирования геомет рических: моделей, позволяющих передавать и обрабатывать геометриче скую информацию.
Геометрическая информация это сведения о форме, размерах и вза имном расположении геометрических образов. Геометрический образ – это точка, прямая, плоскость, поверхность.
Геометрическая модель должна быть однозначной и удобной в исполь зовании
Простейшая такая модель может быть получена методом линейного проецирования.
2. Операция линейного проецирования
Выберем в пространстве плоскость π и точку S, не принадлежащую π. Точку S назовем центром проецирования, а плоскость π – плоскостью проекций или картиной. Центр S и плоскость π составляют аппарат про ецирования.

3
Выбрав аппарат проецирова ния, можно построить проекцию любой точки А пространства. Для этого через S и А проводим луч и отмечаем его пересечение с карти ной: SA∩π=А′ (рис. 1). Луч SA на зывается проецирующим лучом, а точка А′ – проекцией точки А.
В зависимости от положения центра S относительно картины различают следующие виды про ецирования: центральное и парал лельное.
Если центр S находится на конечном расстоянии, то проецирование на зывается центральным (рис. 1). При параллельном проецировании центр бесконечно удален, и все проецирующие лучи проходят параллельно друг другу.
Параллельное проецирование в свою очередь подразделяется на орто гональное и косоугольное.
Если проецирующие лучи перпендикулярны картине π, то проециро вание называется ортогональным (рис. 2, а).
Если проецирующие лучи проходят под острым углом к картине π то проецирование называется косоугольным (рис. 2, б).
рис. 2
Поскольку проецирующими элементами являются прямые линии, то рассмотренное проецирование называется линейным.
Отметим свойства линейного проецирования, в котором зафиксированы центр проецирования и плоскость проекций.
A' A
S
рис. 1
S S
D'
D
E'
E
B'
C' B
C а б

4
Свойство 1.Каждой точке К пространства соответствует единственная ее проекция К′, если эта точка не совпадает с центром проецирования, но ка ждой точке M′ плоскости проекций соответствует бесчисленное множество точек М, .М1, М2, … пространства, для которых первая точка является про екцией (рис. 3).
Свойство это следует непосредственно из определений, поэтому не ну ждается в доказательстве.
Свойство 2. Линейной проекцией прямой линии является также прямая линия, если эта проекция не вырождается в точку (рис. 4).
рис. 3 рис. 4
Центр S и проецируемая прямая АВ определяют в пространстве плос кость σ. При пересечении σ с плоскостью π получается проекция A′B′ прямой АВ. Но две плоскости пересекаются по прямой линии. Следовательно, А′В′ прямая линия. Проекция прямой вырождается в точку только лишь в том случае, когда эта прямая проходит через центр проецирования.
Свойство 3. Линейное проецирование сохраняет инцидентность (вза имную принадлежность) элементов (рис. 4).
Так, если в пространстве точка С принадлежит прямой АВ, то проекция С′ будет принадлежать проекции A′B′. Это следует из того, что все проеци рующие лучи, проходящие через А, В и С, лежат в одной проецирующей плоскости σ и, следовательно, пересекают π в точках, лежащих на линии пе ресечения плоскостей σ и π.
π S
B'
C'
M' M
M 1 M 2
K'
K
π A'
B
C A
S

5
3. Метод двух изображений
Имея одинарный аппарат линейного проецирования, на основании свойства 1 нельзя построить однозначную модель точки пространства. По этому удвоим аппарат проецирования. Возьмем в пространстве две плоскости π1 и π2, расположенные под произвольным углом друг к другу, и два центра S1 и S2 Пусть проецирование на обе плоскости будет центральным (рис. 5).
Плоскость π1 будем называть первой плоскостью проекций (или пер вым полем проекций), π2 – второй плоскостью проекций (или вторым по лем проекций). Линию пересечения плоскостей проекций назовем осью про екций. Обозначим ее х12=π1∩π2. Линию S1S2, соединяющую центры про ецирования, назовем линией центров. Отметим точки пересечения ее с π1 и
π2: S1S2∩π1=U1, S1S2∩π2=U2.U1 и U2 назовем исключенными точками.
S1, S2, π1, π2, U1, U2 состав ляют аппарат проецирования метода двух изображений.
Возьмем произвольную точ ку А пространства и спроецируем ее из S1 и S2 на π1 и π2. Получим пару проекций А1 и А2. Докажем, что они определяют однозначную модель точки А.
Центры S1,S2 и проецируе мая точка А определяют некото рую плоскость α. Она пересекает плоскости проекций π1 и π2 по прямым U1X=α∩π1 и U2X=α∩π2, где Х=α∩х12. Так как проеци рующий луч S1A проходит через две точки, лежащие в плоскости α,
то он весь лежит в этой плоскости. Поэтому точка пересечения его с плоско стью π1 обязательно попадет на прямую U1X, т.е. А1 ∈U1X. По тем же самым соображениям проекция А2 должна попасть на U2X, т.е. А2∈U2X. Точки А1 и А2 будут единственными, поскольку прямая и плоскость пересекаются в од ной точке. Таким образом, можно сказать, что произвольной точке А про странства поставлена в соответствие единственная пара проекций А1, А2: А→(А1,А2).
Справедливо и обратное утверждение. Представим, что имеем центры S1, S2, плоскости π1, π2 с исключенными точками U1, U2 и две проекции А1∈U1X, A2∈U2X. Докажем, что в этом случае можно построить единствен ную точку Апространства, являющуюся прообразом пары точек А1, А2.
x 1 2
A 1
U 1
U 2
S 1
S 2
A
A 2
рис. 5

6
Соединим А1 с S1 и А2 с S2. Эти прямые лежат в одной плоскости α, определенной треугольником U1XU2. Следовательно они, пересекаясь, дают единственную точку А. Таким образом, (А1,А2)→А. Что и требовалось дока зать.
На основании доказанного можно утверждать, что пара А1 и А2, полу ченная рассмотренным методом двух изображений, задает однозначную мо дель точки А, не принадлежащей линии центров S1S2.
Проекции А1 и А2 одной и той же точки А пространства будем в даль нейшем называть соответственными точками, а лучи U1X и U2X, на кото рых они лежат – соответственными лучами.
В зависимости от взаимного расположения плоскостей проекций π1, π2 и центров проецирования S1, S2 возникают различные частные варианты ме тода двух изображений.
4. Метод ортогональных проекций (метод Монжа)
Пусть π1⊥π2 и проецирование на обе плоскости ортогональное (рис 6, а). В таком случае линия центров S1S2 ,будет бесконечно удалена, а, следовательно, бесконечно удаленными окажутся и исключенные точки U1 и U2. Определим их направление.
рис. 6
Так как S1A ⊥π1 и S2A⊥π2, то проецирующая плоскость τ перпендику лярна одновременно π1 и π2. Следовательно, линия пересечения этих плоско стей (ось проекций х12) перпендикулярна τ. Поэтому U1X⊥x12 и U2X⊥х12. Значит, исключенные точки U1 и U2 бесконечно удалены в направлении, перпендикулярном х12.
x 1 2 x
π 1
U 2 A 2
A 1 S 2
S 1
A
π 2
x 1 2
A 1
A 2
U 1 U 1 ≡U 2
x 1 2
A 1
A 2
U 1 ≡U 2 а б в

7
Полученная модель точки является пространственной. Для перехода к плоской модели мысленно удалим проецируемую точку А вместе с проеци рующими лучами и повернем плоскость π2 вокруг оси х 12 до совмещения с π 1. Вследствие перпендикулярности лучей U1Xи U2Xк х12 исключенные точ ки U1 и U2 при совмещении совпадут. Модель примет вид, представленный на рис.6, б. Здесь плоскости π1 и π2 условно показаны ограниченными. Но на плоской модели контуры плоскостей проекций не нужны. Их можно убрать.
В результате получим чертеж, изображенный на рис 6, в. Рассмотренный вариант построения модели впервые был предложен
французским ученым Гаспаром Монжем и потому называется методом Монжа.
Совпавшие лучи U1X и U2X, на которых располагаются соответствен ные точки А1 и А2, назовем линией связи.
Чертеж, полученный при совмещении плоских полей, называется эпюром.
5. Модель точки
Модель точки, построенная по методу двух изображений, является од нозначной. При ортогональном проецировании на взаимно перпендикуляр ные плоскости соответственные лучи перпендикулярны к оси проекций и при переходе к плоской модели сливаются. Поэтому можно сказать, что моделью
точки на эпюре Монжа является пара точек, лежа щих на одной линии связи, перпендикулярной оси проекций.
Для того, чтобы не загромождать чертеж лишними линиями, в дальнейшем линии связи целиком проводить не будем, а только начало и конец, как показано рис. 7, сохраняя при этом перпендикулярность ее к оси проек ций.
рис. 7
В1 будем называть – первая проекция точки В, В2 – вторая проекция точки В.
Примечание. Модели прямых линий и плоскостей рассматриваются на практических занятиях 1 и 3.
x 1 2
B 1
B 2

8
Лекция 2
Моделирование криволинейных поверхностей
План лекции 1.Модель кривой линии. 2.Модели криволинейных поверхностей. 3.Линейчатые поверхности: конические поверхности, цилиндрические
поверхности, цилиндроиды, коноиды, гиперболические параболоиды. 4.Поверхности вращения: сфера, тор, прямой круговой конус, прямой
круговой цилиндр.
1. Модель кривой линии
Кривую линию можно рассматривать как траекторию движения мате риальной точки. Она может быть плоская и прост ранст венная, замкнут ая и разомкнут ая, закономерная и незакономерная.
Кривая, все точки которой находятся в одной плоскости, называется плоской. Если же не все точки кривой укладываются в одну плоскость, то имеем пространственную кривую.
Кривая, образование которой подчинено какомулибо закону, называет ся закономерной. Такая кривая может быть описана уравнением. Незаконо мерная кривая задается совокупностью точек, порядок следования которых не подчиняется никакому закону. Если закономерная кривая описана алгеб раическим уравнением, то степень этого уравнения показывает порядок кри вой. Геометрически порядок кривой определяется максимальным количест вом точек пересечения ее с прямой линией. Так на рис. 1 изображена кривая
четвертого порядка, так как она пересе кается с прямой линией в четырех точ ках.
Среди множества возможных кри вых важный в практическом отношении класс составляют кривые второго по рядка: окружность, эллипс, парабола и гипербола. Их называют также кониче скими сечениями, так как каждая из них может быть получена путем сечения прямого кругового конуса определен ным образом расположенными плоско стями (рис. 2). рис. 1
1 2 3 4

9
При сечении конуса плоскостью α, параллельной основанию, получим окружность; наклонной плоскостью β эллипс; плоскостью γ, параллельной оси, гиперболу; плоскостью δ,параллельной образующей, парабо лу.
Моделью кривой линии в об щем случае является пара кривых, в частном случае кривая и отрезок прямой (рис. 3).
На рис. 3, а представлена модель (f1,f2) незамкнутой кривой f. Она мо жет быть как плоской, так и пространственной.
рис. 3
Если одна из проекций кривой вырождается в отрезок прямой, то эта кривая плоская замкнутая. Такой является кривая l, модель (l1,l2) которой представлена на рис. 3, б.
2. Моделирование криволинейных поверхностей
Криволинейные поверхности бывают линейчатыми, вращения, винто выми, циклическими, каналовыми, каркасными и другими. Познакомимся с самыми распространенными классами поверхностей: линейчатыми и поверх ностями вращения.
δ 1
γ 1 β 1
α 1
парабола
эллипс гипербола
окруж ност ь рис. 2
x 1 2
ƒ 1
ƒ 2
l 1
l 2
x 1 2
a б

10
3. Линейчатые поверхности.
Поверхности, образованные движением прямой линии по какому либо закону, называются линейчатыми. Это самый обширный класс поверх ностей. К ним относятся конические, цилиндрические поверхности, цилинд роиды, коноиды, гиперболические параболоиды. Линейчатыми являются также многогранники.
Конические поверхности. Поверхности, образованные перемещением прямой l, проходящей
через фиксированную точку Т и скользящей вдоль фиксированной кри вой f, называются коническими (рис. 4).
рис. 4 рис. 5
Характер конической поверхности зависит от характера направляющей. Если направляющая замкнутая, то и коническая поверхность будет замкну той. При незамкнутой направляющей – разомкнутая. Порядок конической поверхности таков же, каков и порядок направляющей.
Коническая поверхность имеет две полости, неограниченно прости рающиеся в обе стороны от вершины Т.
Если замкнутую коническую поверхность ограничить вершиной и ка койлибо плоскостью Σ, то получим геометрическое тело – конус (рис 5). Линия m пересечения конической поверхности с плоскостью Σ называется основанием конуса.
Для того, чтобы задать модель конической поверхности, достаточно за дать модель ее определителя.
T
ƒ
l
T
m
∑

11
Совокупность условий, необходимых и достаточных для задания поверхности, называется ее определителем. Он состоит из геометрической и алгоритмической частей. Геометрическая часть представляет собой набор геометрических элементов, при помощи которых строится множество линий, заполняющих пространство. Алгоритмическая часть – совокупность правил использования геометрической части определителя для образования поверх ности.
Определителем конической поверхности является ее вершина и на правляющая. Моделью точки на эпюре Монжа является пара точек, моделью кривой – пара кривых.
На рис. 6 изображена незамкнутая коническая поверхность. Покажем, что, имея такую модель, можно построить образующие поверхности.
x 1 2 1 1
T 1
l 1
l 2 T 2
1 2
x 1 2
a 1
b 1
c 1 2 1
2 2 1 2
a 2 c 2
T 2
T 1
d 2
1 1
рис. 6 рис. 7
Проведем в первом поле через Т1 произвольную образующую l1. Отме тим точку пересечения ее с f1: f1∩l1=11. По линии связи на f2 определяем точку 12. Соединив 12 с Т2, получим проекцию l2 образующей поверхности. Так можно строить сколько угодно образующих.
На рис.7 представлена замкнутая коническая поверхность. Её направ ляющей является плоская кривая второго порядка. Для того чтобы придать модели большую наглядность, проводят очерковые образующие.
Образующие, ограничивающие изображение поверхности в каждом по ле, называются очерковыми. Проведя очерковые образующие а1, b1,c2,d2, получаем геометрическое тело конус.
Как видно из построений, приведенных на рис. 7, очерковые обра зующие первого и второго полей соответственными не являются. Так, во

12
втором поле a2→a1 не совпадает ни с c2, ни с d2; а в первом поле с1→с2 не совпадает ни с а1, ни с b1.
Цилиндрические поверхности
Поверхности, образованные перемещением прямой линии вдоль фиксированной кривой, сохраняя заданное направление, называются цилиндрическими (рис. 8).
Цилиндрическую поверхность можно рас сматривать как частный случай конической поверх ности, вершина которой бесконечно удалена. По этому всё, что было сказано о конической поверхно сти, справедливо и для цилиндрической. Только – в отличие от конической – цилиндрическая поверх ность имеет одну полость. Часть замкнутой цилинд рической поверхности, ограниченной двумя плоско стями, образует геометрическое тело цилиндр.
На рис. 9 представлена модель незамкнутой цилиндрической поверхности. Проекции образующих этой поверхности про ходят в направлении, параллельном Т1 и Т2.
x 1 2
1 1
T 1
l 1
l 2
T 2
1 2
x 1 2
a 1
b 1
d 1
2 1
2 2
1 2
d 2
c 2
T 2
T 1
b 2
1 1
рис. 9 рис. 10
Очерковые образующие a1, b1, c2, d2 замкнутой цилиндрической по верхности, представленной на рис. 10, соответственными не являются. Из рис. 10 видно, что в первом поле d1→d2 не совпадает ни с а1, ни с b1, а во втором поле b2→b1 не совпадает ни с с2, ни с d2.
ƒ
l
T
рис. 8

13
Цилиндроид
Поверхность, образованная движением прямолинейной образую щей l по двум кривым линиям m и n параллельно плоскости Р, называ ется цилиндроидом
Кривые m и n – направляющие цилиндроида, Р – плоскость паралле лизма. Эти элементы являются определителем цилиндроида.
На рис. 11 представлены две проекции цилиндроида и его аксономет рия. Каркас поверхности образован девятью образующими. Поскольку плос кость Р горизонтально проецирующая, то построение каркаса начинаем с го ризонтальной проекции. Чтобы каркас был равномерным, делим m2 и n2 на равные части и проводим через точки деления образующие параллельно Р2.
рис. 11
Затем по линии связи переносим точки на m1, n1 и соединяем их между собой.
0 8
0
8
2 4
6
0 2
4 6
8
2 4
6
8
6 4 2
0 l 1
l 2
m 2
n 2
P 2
x y
x′ y′
z′
m 1 n 1 0
0
8
8
2
2
4
4
6
6

14
Наглядное изображение выполнено в прямоугольной изометрии. На ор тогональном чертеже ось х направлена вдоль образующих, у – вдоль направ ляющих.
Коноид Поверхность, образованная движением прямолинейной образую
щей по двум направляющим, одна из которых кривая линия m, другая – прямая n, параллельно плоскости параллелизма Р, называется конои дом.
Ортогональные проекции и наглядное изображение коноида представ лено на рис. 12.
рис. 12
Построение каркаса начато с горизонтальной проекции по тому же принципу, что и у цилиндроида.
Гиперболический параболоид (или косая плоскость) Поверхность, образованная движением прямолинейной образую
щей параллельно плоскости параллелизма по двум скрещивающимся прямым, называется гиперболическим параболоидом или косой плоско стью.
0
m 1
2
l 1
0 2 8 n 1
10
10
4 6
4 6
P 2 m 2 4
6 8
2 0
x
l 2
y
8 6
4
n 2 2 0
10
10
x′ 0
8
6
4 2
0
z′
2
4 6
8
y′
10
10 x 1 2

15
Ортогональные проекции и прямоугольная диметрия косой плоскости представлены на рис. 13.
Гиперболический параболоид – билинейная поверхность. Она содержит два семейства прямолинейных образующих. Если принять за направляющие прямые АВ и CD, а за плоскость параллелизма – горизонтально проецирую щую плоскость Σ, получим первое семейство образующих BC, …, AD, парал лельных Σ.
y ? 2
A 2
2
4
6
С 2 1
4
D 2
x
6
2
3
3
5
7
5
1
7
2
1
3
4
5 6
7
D 1 B 1
1
2
3
4
5
6
7
A 1 ≡ С 1
x 1 2
Σ 2
z′
y′
x′
B
D
A
С
1
2
3
4
5
6
7
1 2 3 4 5 6 7
τ 2
рис. 13
Если принять за направляющие прямые крайние образующие первого семейства ВС и AD, которые также являются скрещивающимися, и другую плоскость параллелизма τ, получим второе семейство образующих АВ,…, CD (на рис. 13 оно не показано).

16
4. Поверхности вращения
Возьмём какуюлибо линию l и будем вращать её вокруг оси i. В ре зультате получим поверхность вращения (рис. 14). Линия l называется её образующей. Каждая точка образующей при вращении в пространстве опи сывает окружность, плоскость которой перпендикулярна оси. Поэтому при моделировании поверхности вращения одна из её проекций изображается в виде окружности. Контур другой проекции повторяет форму образующей (рис. 15).
Контуры, ограничивающие изображение поверхности вращения, назы ваются очерками. Очерки разных полей соответственными не являются.
Сфера. Поверхность, образованная вращением окружности вокруг её диа
метра, называется сферической. На эпюре она изображается окружностями одинакового радиуса, но очерки в каждом поле разные (см. рис. 16).
рис. 14 рис. 15 рис.16
Торовая поверхность. Поверхность, образованная вращением окружности или её дуги во
круг оси, не совпадающей с диаметром, называется торовой. На рис. 17 показаны три разновидности торовой поверхности. Тор,
представленный на рис. 17, а, образован вращением целой окружности во круг оси i⊥π2. На горизонтальной проекции внешний очерк тора представля ет собой траекторию движения точки А, внутренний очерк – траекторию
l 1 i 1
q 1
l 2
q 2
i 1
q 1
q 2
i 2
f 1
f 2
l
i

17
движения точки В, осевая линия – траекторию движения центра О окружно сти. Поверхность, образованная вращением выпуклой дуги окружности во круг оси i⊥π2, показана на рис. 17, б. Вращением вогнутой дуги окружности образована поверхность, изображённая на рис.17, в.
q 1
q 1
q 2
f 1
i 1
i 2
f 2
q 2
О 1 A 1 B 1
q 2
A 2 B 2 О 2
f 1 f 1
q 2
f 2 i 2 i 2 f 2
i 1 i 1
q 1
а б в
рис. 17
При вращении прямой линии вокруг оси образуется прямой круговой конус, если прямая пересекает ось, или прямой круговой цилиндр, если прямая параллельна оси. Их модели показаны на рис.18, 19.
i 2 i 2
i 1
i 1
a 1
c 1 ≡ d 1
b 1
b 2 a 2
c 2
d 2
i 3 c 3
a 3 ≡ b 3
d 3 a 1
b 1
c 1 ≡ d 1
i 3
a 3 ≡ b 3 d 3
c 3
A 2
C 2
B 2
D 2 рис. 18
Конус и цилиндр можно рассматривать и как линейчатые, и как по верхности вращения.
На всех чертежах показаны проекции очерков поверхностей. Поверхности, образующие которых перпендикулярны плоскости про
екций, называются проецирующими. Прямой круговой цилиндр является проецирующей поверхностью.

18
Вопросы для самопроверки по разделу “Конструирование геомет рических моделей”
Во всех разделах вопросы для самопроверки включают в себя материал не только лекций, но и практических занятий.
1. Каким проецированием может быть получена простейшая геометри ческая модель?
2. Состав аппарата линейного проецирования. 3.Отличие метода двух изображений от метода Монжа. 4. Что такое эпюр Монжа? 5. Дать определение оси проекций. 6. Модель точки на эпюре Монжа. 7. Модель прямой линии общего положения на эпюре Монжа. 8. Дать определение линии уровня. 9. Характерный признак изображения на эпюре линии уровня. 10. Какая прямая линия называется проецирующей? 11. Характерный признак изображения на эпюре проецирующей пря
мой. 12.Какой линией уровня является фронтальнопроецирующая прямая? 13. Указать различие в изображении на эпюре пересекающихся и скре
щивающихся прямых линий. 14. Как изображаются на эпюре параллельные прямые линии? 15. Способы задания на эпюре модели плоскости общего положения. 16. Как задаётся на эпюре проецирующая плоскость? 17. Что общего между проецирующей плоскостью и плоскостью уров
ня? 18. Как может моделироваться кривая линия на эпюре Монжа? 19. Что такое порядок кривой линии? 20. Алгебраический и геометрический способ определения порядка
кривой линии. 21. Перечислить кривые второго порядка. 22. Сечениями, какого геометрического тела являются все кривые ли
нии второго порядка? 23. Перечислить виды криволинейных поверхностей. 24. Что называется определителем поверхности? 25. Дать определение линейчатой поверхности. 26.Перечислить линейчатые поверхности с одной направляющей. 27. Сформулировать геометрическую и алгоритмическую часть опреде
лителей линейчатых поверхностей с одной направляющей. 28. Перечислить линейчатые поверхности с двумя направляющими. 29. Сформулировать геометрическую и алгоритмическую часть опреде
лителя каждой линейчатой поверхности с двумя направляющими. 30. Дать определение поверхности вращения.

19
31. Привести примеры криволинейных поверхностей, являющихся по верхностями вращения.
32. Перечислить проецирующие поверхности. 33. Правило построения точек, лежащих на линейчатых поверхностях. 34. Правило построения точек, лежащих на поверхностях вращения.
Лекция 3
Пересечение плоскости с поверхностью План лекции 1.Алгоритм решения задачи 2.Пересечение проецирующей плоскости с поверхностью 3.Пересечение плоскости общего положения с проецирующей поверх
ностью. 4.Пересечение плоскости общего положения с не проецирующей по
верхностью.
Построить линию пересечения плоскости с поверхностью значит построить линию, все точки которой лежат в заданной плоскости и при надлежат одновременно заданной поверхности.
Для построения линии пересечения необходимо: 1.Найти характерные точки искомого сечения, т.е. точки, лежащие на
основании поверхности, на ребрах, очерках, очерковых образующих, высшей и низшей, крайних правой и левой точек. Высшая и низшая точки находятся в плоскости симметрии всей фигуры, которая проходит через ось поверхности перпендикулярно либо следу плоскости, либо соответствующей линии уров ня этой плоскости.
2.Если поверхность криволинейная, то для уточнения линии построить промежуточные точки. Для многогранника такие точки не нужны.
3.Определить видимость точек и последовательно соединить их с учё том видимости.
Возможны три комбинации. Комбинация 1.Плоскость проецирующая, поверхность общего по
ложения. Одна из проекций искомой линии пересечения уже есть. Она совпадает
со следом плоскости. Это будет та его часть, которая находится в пределах изображения поверхности. Другая проекция строится как совокупность не достающих проекций точек, принадлежащих заданной поверхности.
Пример 1.Построить сечение конуса проецирующей плоскостью Σ (рис. 1).
Так как секущая плоскость параллельна оси конуса, то в сечении полу чится гипербола. Горизонтальная проекция её совпадает со следом α2, распо

20
ложенным в пределах изображения конуса (от А2 до В2).Для построения фронтальной и профильной проекций гиперболы отмечаем характерные точ ки А2, В2, С2 и переносим их в π1 и π3, учитывая, что А и В лежат на основа нии конуса, С – на его очерковой образующей а (С1∈а1). Точка D2 тоже ха рактерная, поскольку она лежит на очерковой b (D3∈b3).Построим сначала D1.
рис. 1
Так как прямой круговой конус – поверхность вращения, то точки на нём строим через окружности, учитывая, что его ось i⊥π2. Проводим через D2 окружность. Отмечаем (крестиком) точку пересечения окружности с го ризонтальным диаметром и переносим её на очерковую образующую в пер вое поле. На π1 эта окружность проецируется в отрезок прямой, перпендику лярный оси конуса, на которой отмечаем D1 и по линии связи переносим её на b3 (получаем D3).
Для нахождения высшей точки гиперболы проводим Σ2⊥α2 и отмечаем Е2. Проекцию Е1 строим через окружность приёмом, применённым для на хождения D1.
а 2
Σ 2
C 2
α 2
E 2 D 2
B 2 b 2
E 1 D 1 C 1
а 1
A 2
A 1 B 1
C 3
A 3
D 3
B 3
E 3

21
Найденные характерные точки позволяют видеть в общих чертах кон туры фигуры сечения. Но для уточнения линии необходимо построить про межуточные точки. Проекции окружностей проводим в том месте, где точек недостаточно. В рассматриваемом примере – это между А1 и С1, В1 и D1. Построение начинаем с первой проекции. Берём отрезок, перпендикулярный оси там, где хотим получить промежуточные точки. Замеряем радиус (рас стояние от оси до очерковой) и проводим окружность во втором поле. Точки пересечения окружности с α2 переносим в первое и третье поля. Условимся на будущее обозначать только характерные точки. Поэтому промежуточные точки на чертеже не обозначены.
После нахождения достаточного количества точек определяем их ви димость и последовательно соединяем с учётом видимости. При проецирова нии на π1 на фигуру смотрим спереди. Часть поверхности конуса, располо женная ниже горизонтального диаметра, ближе к наблюдателю и потому в первом поле видима. При проецировании на π3 на фигуру смотрим слева. Те перь ближе к наблюдателю будет часть поверхности конуса, расположенная левее вертикального диаметра. Эта часть видима в третьем поле.
Точки С1 и D3, отделяющие видимую часть линии от невидимой, назы ваются точками видимости.
Пример 2.Построить сечение m сферы проецирующей плоскостью β (рис. 2).
При пересечении сферы с плоскостью полу чается окружность. Но если она не параллельна плоскости проекций, то на эпюре изображается в виде эллипса.
Так как β⊥π2, то m2≡β2 (в пределах изобра жения сферы). Проекцию m1 строим как совокуп ность точек, лежащих на поверхности вращения, через окружности. Поскольку сфера – круглая по верхность, то за ось вращения можно принять лю бой её диаметр. Для построения точек проекции m1 удобно принять за ось горизонтальный диаметр j.
В первую очередь находим крайние точки А1, В1, перенеся их с очерка второго поля и точки видимости С1 и С1′, перенеся их с горизонтально го диаметра. Затем строим высшую и низшую точ ки Е1 и Е1′,используя плоскость Σ (Σ2⊥β2) и нахо дим несколько промежуточных. Полученные точ
ки соединяем с учётом их видимости. рис. 2
Комбинация 2. Поверхность проецирующая, плоскость общего по ложения.
B 2
E 2
C 2
A 2
B 1 A 1
C 1 ′
E 1
m 2
j 1
j 2
C 1
E 1 ′
m 1
∑ 2 β 2

22
Одна из проекций искомой линии пересечения совпадает с основанием поверхности. Другая её проекция строится как совокупность недостающих проекций точек, лежащих в заданной плоскости.
Пример 3. Построить линию пере сечения прямого цилиндра с плоскостью γ(f∩h).общего положения (рис. 3).
Прямой круговой цилиндр являет ся проецирующей поверхностью. Его образующие перпендикулярны π1. По этому первая проекция искомой линии уже есть. Она совпадает с основанием цилиндра. Для построения второй про екции берём точки на окружности осно вания цилиндра и строим их как недос тающие проекции точек, лежащих в плоскости γ. Эти построения выполняем при помощи прямых линий, параллель ных h.
В первую очередь определяем по ложения точек видимости А2 и В2 на очерковых образующих цилиндра, С2 и D2 – проекций высшей и низшей точек первого поля. Плоскость Σ, проведённая
через ось цилиндра перпендикулярно фронтали f секущей плоскости γ (Σ1⊥f1), определяет положение точек E1 и F1, вторые проекции которых Е2 и F2 будут соответственно высшей и низшей точками фигуры сечения на π2.При построении точек Е2 и F2 были найдены и две промежуточные точки, оказавшиеся с Е1 и F1 на одной прямой линии.
Соединив построенные точки, получаем сечение цилиндра плоскостью γ Часть эллипса, расположенная в верхней половине цилиндра, на π2 видима.
Комбинация 3. Поверхность и плоскость общего положения. Задача решается либо способом замены плоскостей проекций, либо ме
тодом вспомогательных секущих плоскостей. В первом случае эпюр преобра
зуется так, чтобы плоскость общего положения стала проецирующей, и усло вие задачи сводится к комбинации 1.
Во втором случае проводятся вспомогательные секущие плоскости так, чтобы они пересекли и плоскость, и поверхность. Строятся линии пересече ния вспомогательных плоскостей с заданной плоскостью и поверхностью. Отмечаются общие точки, через которые пройдёт искомая линия.
Если задан многогранник, то вспомогательные секущие плоскости удобно проводить через его ребра. В этом случае задача сводится к построе
B 2
E 2 C 2 A 2
B 1 A 1
E 1
f 2
f 1
C 1
∑ 1
h 1
D 1 3 1
5 1
1 1
4 1
2 1
h 2
1 1 5 1 3 1 4 1 2 1
D 2
рис. 3

23
нию точек пересечения рёбер многогранника с заданной секущей плоско стью.
Пример 4. Построить линию пересечения наклонной призмы с плоско стью δ(m∩n) общего положения (рис. 4).
рис. 4
Точки пересечения рёбер a, b и с призмы с плоскостью δ определены при помощи проведённых через них проецирующих плоскостей α, β и γ: а∩δ=М, b∩δ=K, с∩δ=N. В сечении получаем ∆KMN.
Лекция 4
Пересечение поверхностей
План лекции 1.Алгоритм решения задачи. 2.Метод вспомогательных плоскостей. 3.Метод сфер: а) соосные поверхности, б) метод концентрических сфер, в) метод эксцентрических сфер.
1. Алгоритм решения задачи
b 1
B 2
M 2
C 2
A 2
B 1
A 1
К 1
m 2 ≡ n 1 C 1
М 1
α 1
β 1
N 1
m 1 1 1
2 1
3 1 γ 1
К 2 N 2
n 2
b 2
c 1 1 2 2 2 3 2
c 2
a 2
a 1

24
Построить линию пересечения двух поверхностей это значит построить линию, все точки которой принадлежат одновременно каждой из заданных поверхностей. Задача решается мет одом вспомогат ельных секущих поверх ност ей.
Пусть заданы две поверхности ϕ и Ψ, условно показанные на рис. 1. Требуется построить линию их пересечения.
Построение выполняем в следующей последовательности.
1.Проводим вспомогательную секу щую поверхность ω так, чтобы она пересек ла каждую из заданных поверхностей по простейшей линии.
2. Строим линии пересечения вспомо гательной поверхности с каждой из задан ных поверхностей: ω∩ϕ=m, ω∩Ψ=n. Одну из этих линий достаточно построить только в одной проекции.
3. Отмечаем точки пересечения по строенных линий: m∩n=K,L. Они принад лежат каждой из заданных поверхностей, а следовательно и линии их пересечения.
4. Выбираем ещё одну вспомогатель ную поверхность и снова выполняем все предыдущие построения. Процесс этот продолжаем до тех пор, пока не получим достаточное количество точек, принадлежащих искомой линии пересечения поверхностей.
5. Определяем видимость точек и последовательно соединяем их с учё том видимости.
6. Определяем видимость очерков и очерковых образующих заданных поверхностей и обводим их до точек пересечения с другой поверхностью.
В качестве вспомогательных секущих поверхностей можно использо вать плоскости, сферы, цилиндрические и конические поверхности, эллип соиды, параболоиды и другие поверхности вращения.
Для того чтобы правильно соединить построенные точки, необходимо предварительно представить какой вид должна иметь искомая линия. Её ха рактер зависит от характера пересекающихся поверхностей. Разобьём пары поверхностей на три группы.
1.Пересекаются два многогранника. В общем случае получается про странственная замкнутая ломаная линия, состоящая из отрезков прямых. В частном случае она может распадаться на плоские многоугольники.
2. Пересекаются многогранник и криволинейная поверхность второго порядка. В общем случае получается пространственная замкнутая ломаная линия, состоящая из дуг кривых второго порядка. В частном случае она мо жет распадаться на плоские кривые и отрезки прямых линий.
рис. 1
рис. 1
25
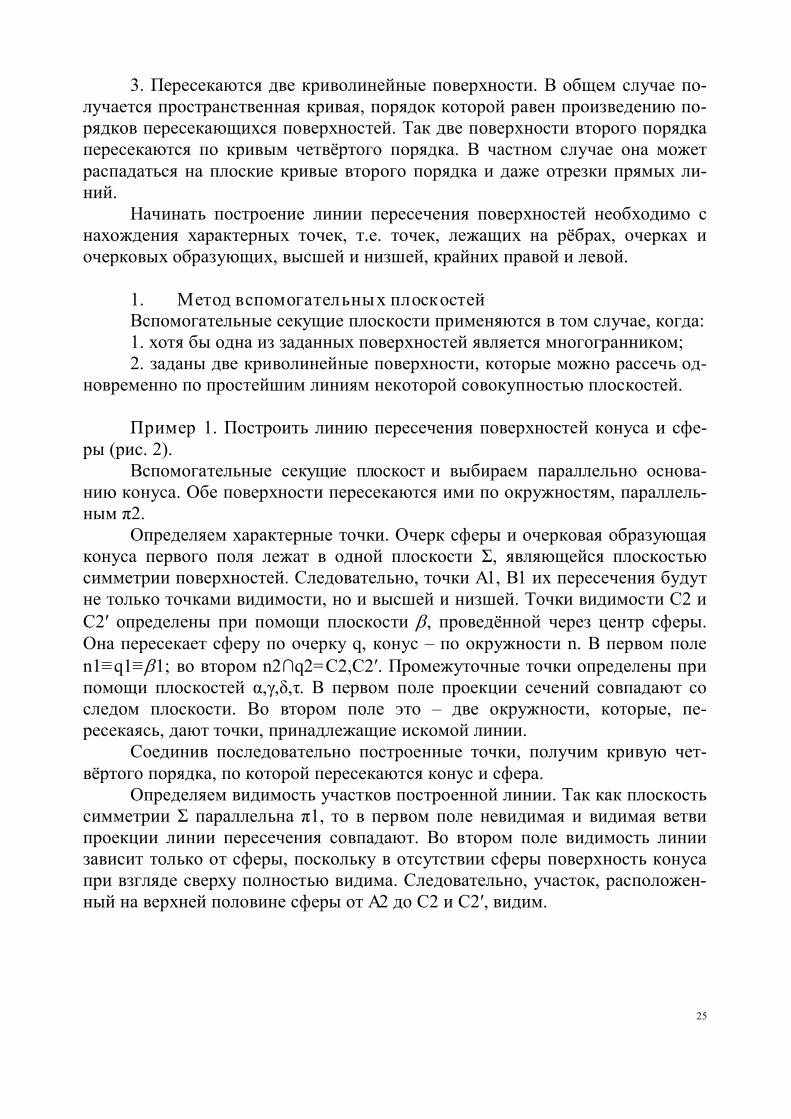
3. Пересекаются две криволинейные поверхности. В общем случае по лучается пространственная кривая, порядок которой равен произведению по рядков пересекающихся поверхностей. Так две поверхности второго порядка пересекаются по кривым четвёртого порядка. В частном случае она может распадаться на плоские кривые второго порядка и даже отрезки прямых ли ний.
Начинать построение линии пересечения поверхностей необходимо с нахождения характерных точек, т.е. точек, лежащих на рёбрах, очерках и очерковых образующих, высшей и низшей, крайних правой и левой.
1. Метод вспомогательных плоскостей Вспомогательные секущие плоскости применяются в том случае, когда: 1. хотя бы одна из заданных поверхностей является многогранником; 2. заданы две криволинейные поверхности, которые можно рассечь од
новременно по простейшим линиям некоторой совокупностью плоскостей.
Пример 1. Построить линию пересечения поверхностей конуса и сфе ры (рис. 2).
Вспомогательные секущие плоскост и выбираем параллельно основа нию конуса. Обе поверхности пересекаются ими по окружностям, параллель ным π2.
Определяем характерные точки. Очерк сферы и очерковая образующая конуса первого поля лежат в одной плоскости Σ, являющейся плоскостью симметрии поверхностей. Следовательно, точки А1, В1 их пересечения будут не только точками видимости, но и высшей и низшей. Точки видимости С2 и С2′ определены при помощи плоскости β, проведённой через центр сферы. Она пересекает сферу по очерку q, конус – по окружности n. В первом поле n1≡q1≡β1; во втором n2∩q2=C2,C2′. Промежуточные точки определены при помощи плоскостей α,γ,δ,τ. В первом поле проекции сечений совпадают со следом плоскости. Во втором поле это – две окружности, которые, пе ресекаясь, дают точки, принадлежащие искомой линии.
Соединив последовательно построенные точки, получим кривую чет вёртого порядка, по которой пересекаются конус и сфера.
Определяем видимость участков построенной линии. Так как плоскость симметрии Σ параллельна π1, то в первом поле невидимая и видимая ветви проекции линии пересечения совпадают. Во втором поле видимость линии зависит только от сферы, поскольку в отсутствии сферы поверхность конуса при взгляде сверху полностью видима. Следовательно, участок, расположен ный на верхней половине сферы от А2 до С2 и С2′, видим.

26
Очерки поверхностей в пер вом поле обводим только до точек пересечения А1, В1. Во втором – очерк q2 обводим до С2 и С2′. Ос нование конуса в пересечении не участвует, но перекрывается сфе рой. Поэтому его участки, закрытые сферой, показываем штриховой ли нией.
Решение задачи значительно упрощается, если одна из поверхно стей занимает проецирующее поло жение. В этом случае одна из про екций искомой линии совпадёт с ос нованием проецирующей поверхно сти. Это будет та его часть, которая расположена в пределах изображе ния другой поверхности. Задача сводится к построению совокупно сти недостающих проекций точек, лежащих на второй поверхности.
К указанной выше группе от носятся и задачи на построение гео метрического тела со сквозным от верстием или вырезом.
Пример 2. Построить три проекции пирамиды с призматическим выре зом (рис. 3).
Эту задачу решаем как пересечение двух многогранников, один из ко торых (имеющий форму призматического отверстия) проецирующий.
Контур выреза на π1 задан. На него попадает линия пересечения пира миды с проецирующей призмой, основание которой имеет форму контура выреза. Достраиваем его вторую проекцию.
При пересечении многогранников определяем положение только харак терных точек, т.е. точек, лежащих на рёбрах. У пирамиды это точки 1, 2, 3, 6, 7, 8. Они определяются сразу при пересечении контура выреза с рёбрами и никаких дополнительных построений не требуют. У призмы – точки 4 и 5. Для их построения используем вспомогат ельные горизонтальные плоскост и α и β, следы которых α1 и β1 проводим через 41 и 51. Пирамиду они пересе кают по четырёхугольникам, подобным основанию. На рис. 3 сечения прове дены не полностью, а только справа, где находятся искомые точки. По линии связи отмечаем на них 42, 42′ и 52, 52′.
B 2 A 2
C 2
C′ 2
n 2 n′ 2
n′ 1
Σ 2
α 1 γ 1
β 1
δ 1
τ 1
q 1 C 1 ≡C′ 1
A 1
m 1
B 1
n 1
m 2
q 2
рис. 2

27
S 1
B 2
А 2
4 1 1 1 2 1 3 1 4 1
β 1
α 1
A 1 D 1 B 1 C 1
4 1 4 1
A 2
D 2
7 2
8 2 1 2 S 2 4 2
2 2 5 2
C 2
S 3
3 3
6 3
4 3
5 3
A 3 C 3 D 3 5 3 ′
7 3
1 3 2 3
8 3
4 3 ′
4 2 ′ 5 2
6 2 3 2
рис. 3
Последовательно соединив построенные точки, получаем пространст венную замкнутую ломаную линию, состоящую из отрезков прямых
2. Метод вспомогательных сфер
Применение вспомогательных секущих сфер основано на свойстве со осных поверхностей вращения. Поверхности, оси которых совпадают, назы ваются соосными.
Соосные поверхности вращения пересекаются по окружностям, лежащим в плоскостях, перпендикулярных их общей оси (рис. 4). Если общая ось поверхностей вращения параллельна одной из плоскостей проекций, то окружности на эту плоскость проецируются в виде отрезков прямых, соеди няющих точки пересечения очерковых линий поверхностей.
i 1 i 1 i 1
рис. 4

28
Построить линию пересечения поверхностей с помощью вспомогатель ных секущих сфер можно двумя способами. В одном из них используются сферы, проведённые из одного общего центра, а в другом – сферы, проведён ные из разных центров. В первом случае имеем способ концентрических сфер, во втором – способ эксцентрических сфер.
Способ концентрических сфер применяется в том случае, когда: 1. Заданы две поверхности вращения; 2. Оси поверхностей пересекаются; 3. Плоскость осей параллельна одной из плоскостей проекций. Пример 3. Построить линию пересечения конуса с цилиндром (рис. 5).
C 2
E 2
E′ 2
F 2
F′ 2
E 1 F 1
O 1
C 1
j 1
A 1
B 1
D 1
i 1
i 2 j 2 A 2 B 2 D 2
K 1
M 1
K 2 M 2
K′ 2 M ′ 2 d 2
c 2
c 1 ≡d 1
r min
R max
Σ 2
рис. 5

29
Имеем две поверхности вращения с пересекающимися осями i и j, ле жащими в плоскости Σπ1. Следовательно, можно использовать вспомога тельные концент рические сферы. Они проводятся в том поле, которому па раллельна плоскость осей, т.е. в π1. Каждая сфера пересечёт поверхности по окружностям, проецирующимся на π1 в виде хорд, перпендикулярных осям конуса и цилиндра. При этом проводятся те из проекций окружностей, кото рые расположены в пределах изображения другой поверхности.
Определим центр сфер. Поскольку они должны быть сосны с каждой из заданных поверхностей, то центр О1 сфер находится в точке пересечения осей конуса и цилиндра.
Очерковые образующие первых проекций конуса и цилиндра лежат в одной плоскости Σ. Следовательно, точки А1, В1, С1, D1 их пересечения при надлежат искомой линии. А2, В2, С2,D2 ∈Σ2.
Имеем две поверхности вращения с пересекающимися осями i и j, ле жащими в плоскости Σπ1. Следовательно, можно использовать вспомога тельные концентрические сферы. Они проводятся в том поле, которому па раллельна плоскость осей. Каждая сфера пересечет поверхности по окружно стям, проецирующимся на π1 в виде хорд, перпендикулярных осям конуса и цилиндра. При этом проводятся те проекции окружностей, которые располо жены в пределах изображения другой поверхности.
Определим центр сфер. Поскольку они должны быть соосны с каждой из заданных поверхностей, то центр О1 сфер находится в точке пересечения осей конуса и цилиндра.
Очерковые образующие первых проекций конуса и цилиндра лежат в одной плоскости Σ. Следовательно, точки A1, B1, С1, D1 их пересечения принадлежат искомой линии. A2, B2, C2, D2 ∈ Σ2.
Определим максимальный и минимальный радиусы сфер. Очевидно, очерк сферы радиусом Rmax пройдет через самую удаленную от О1 харак терную точку А1. Очерк сферы радиусом rmin должен касаться очерковых образующих одной поверхности, пересекая одновременно очерковые другой поверхности. Опустим из центра О1 перпендикуляры на очерковые обра зующие обеих поверхностей. Больший из этих перпендикуляров и будет rmin. Так как сфера коснулась конуса, то конус шире цилиндра. Тогда цилиндр пройдет сквозь конус, и в пересечении получатся две линии – линия входа цилиндра в конус и линия выхода его из конуса. А характерные точки E1 и F1, найденные при помощи сферы радиусом rmin, являются крайними правой и левой этих линий.
Проводя сферы радиусами rmin< R < Rmax, получим промежуточные точки искомых линий пересечения конуса и цилиндра. На рис.5 использова ны четыре промежуточные сферы.
Во второе поле точки искомых линий переносим через окружности ко нуса, по которым он пересекается со сферами. Но в первую очередь опреде лим точки видимости К2, К2′, М2, М2′ на очерковых образующих с2 и d2

30
цилиндра. Их проекции в первом поле совпадают с осью цилиндра: с1≡d1≡j1. Отмечаем точки К1 и М1 пересечения построенных линий с осью j1 и пере носим их во второе поле на с2 и d2. Видимость линии во втором поле зависит только от цилиндра, так как поверхность конуса при взгляде сверху в отсут ствие цилиндра была бы полностью видна. Следовательно, на π2 участки ли ний, проходящие через В2 и С2 между очерковыми цилиндра, будут видны.
Вопросы для самопроверки по разделу “Позиционные задачи” 1. Дать определение позиционных задач. 2. Что значит построить точку пересечения прямой линии с плоскостью
или поверхностью? 3. Каким методом решается задача на пересечение прямой линии с
плоскостью или поверхностью? 4. Сущность метода вспомогательной секущей плоскости. 5. Какие плоскости используются преимущественно в качестве вспомо
гательных секущих плоскостей? 6. Обоснуйте необходимость применения в отдельных случаях плоско
стей общего положения. 7. Что значит построить линию пересечения плоскости с поверхно
стью? 8. Какие образующие линейчатой поверхности называются очерковы
ми? 9. Указать места расположения характерных точек фигуры сечения. 10. Как определить высшую и низшую точку фигуры сечения поверх
ности вращения плоскостью? 11. К решению какой задачи сводится построение сечения тела проеци
рующей плоскостью? 12. К решению какой задачи сводится построение сечения проецирую
щей поверхности плоскостью общего положения? 13. Что значит построить линию пересечения двух поверхностей? 14. Алгоритм решения задачи на пересечение поверхностей. 15. Как должна выглядеть линия пересечения двух многогранников? 16. Как в общем случае выглядит линия пересечения многогранника и
криволинейной поверхности? 17. Как могут пересекаться две криволинейные поверхности? 18. Особенности соосных поверхностей. 19.Условия, необходимые для применения вспомогательных секущих
плоскостей. 20. Указать различие между концентрическими и эксцентрическими
сферами 21. Условия, необходимые для применения концентрических сфер. 22. Как определить наибольший радиус вспомогательной сферы? 23. Способ определения наименьшего радиуса вспомогательной сферы.

31
24. Какие характерные точки определяются при помощи сферы наи меньшего радиуса?
25. При помощи какой сферы можно дать предварительную оценку ис комой линии пересечения поверхностей?
26. Когда возникает необходимость в использовании двух проекций вспомогательной сферы?
27. Сформулировать теорему Монжа. 28. Условия, необходимые для применения эксцентрических сфер. 29. Как иначе можно назвать метод эксцентрических сфер?

32
Лекция 5
Метрические задачи
План лекции 1. Построение дополнительной ортогональной проекции. 2. Преобразование эпюра путём дополнительного ортогонального
проецирования. 3. Метрические задачи.
Рассматривая позиционные задачи, мы убедились, что их проще ре шать, когда геометрические образы занимают частное положение относи тельно плоскостей проекций. Но, если заданы образы общего положения, то их можно привести в частное расположение путём преобразования эпюра. Такое преобразование можно выполнить двумя способами.
1.Оставить неизменным положение геометрического образа, изменяя расположение плоскостей проекций относительно этого образа.
2. Оставить неизменными плоскости проекций, но менять расположе ние геометрического образа относительно этих плоскостей.
Второй способ уже использовался при выполнении эпюра 1. Нату ральная величина фигуры сечения была определена вращением её плоскости вокруг оси. Остановимся на первом способе.
Известно, что две проекции вполне определяют однозначную модель заданного геометрического образа. Всякая третья проекция является допол нительной или избыточной и может быть построена по двум заданным.
1. Построение дополнительной ортогональной проекции. Возьмём три плоскости проекций π1, π2,π3. Пусть π1⊥π2 и π3⊥π1, при
чём π1∩π2=х12, π1∩π3=х13, π2∩π3=х23. Проецирование на все плоскости ортогональное (рис. 1). Примем π1 и π2 за исходные поля, π3 – за дополни тельное поле.
Возьмём произвольную точку А пространства и спроецируем её на все три плоскости проекций. Получим три проекции А1, А2, А3, где А1, А2 – ис ходные проекции, А3 – дополнительная. Посмотрим как связана дополни тельная проекция А3 с исходными А1 и А2.
Рассмотрим плоскость τ(S1AS3). Поскольку проецирование на все плос кости ортогональное, то S1A⊥π1, S3A⊥π3. Но S1A∈τ, S3A∈τ. Из курса геомет рии средней школы известно, что если плоскость проходит через перпенди куляр к другой плоскости, то она перпендикулярна этой плоскости. Следова тельно, τ⊥π1 и τ⊥π3. В таком случае х13⊥τ. На основании теоремы: если пря мая перпендикулярна плоскости, то она перпендикулярна любой прямой, ле жащей в плоскости, можно утверждать, что b1⊥х13, b3⊥х13,где A1∈ b1, A3∈b3.

33
π 1
b 1
х 12
π 2
π 3
х 23
х 1 3
V 1
S 3
A 1
a 1
W 2 A 2 U 2
a 2 c 2
A
S 2 U 1
S 1
c 3
V 3
W 3 A 3
b 3
рис. 1
Это означает, что А1 и А3 расположены на соответственных лучах b1 и b3, перпендикулярных оси х13.
1. Рассмотрим плоскость σ(S2AS3). Из построений видно, что S2A⊥π2 и S2A∈σ ⇒ σ⊥π2; S3A⊥π3 и S3A∈σ
⇒σ⊥π3. Но по условию π1⊥π2 и π1⊥π3 ⇒ σπ1 ⇒ А2Х=А3Y. Это означает, что А2 и А3 находятся на одинаковых расстояниях от осей х12 и х13.
Если трёхгранный угол, образованный плоскостями проекций, разре зать по оси х23 и развернуть π2 и π3 до совмещения с π1, получим схему, представленную на рис 2.
В результате проведённой операции произошла замена плоскостей про екций. От исходной системы π1/π2 осуще ствлён переход к системе π1/π3, т.е. вме сто поля π2 введено новое поле π3.
Выведем правило замены плоско стей проекций. Введём следующие поня тия:
π1 – остающееся поле проекций, π2 – заменяемое поле проекций, А1 – остающаяся проекция точки, А2 – заменяемая проекция точки, А3 – новая проекция точки, х12 – предыдущая ось проекций, х13 – новая ось проекций.
х 12
А 1
А 3
А 2
b 1 ≡ b 3 х 13
W 2 c 2
W 3
с 3
V 1 ≡ V 3
рис. 2

34
При замене одной из плоскостей проекций ост ающаяся и новая проек ции точки должны лежать на одной линии связи, перпендикулярной новой оси, а расст ояние от заменяемой т очки до предыдущей оси равно расст оянию от новой оси до новой проекции т очки.
На рис. 3, а представлена рассмотренная выше схема построения до полнительной проекции на плоскость π3⊥π1.
x 1 2
A 2
A 1
A 3 x 1
3
x 1 2
x 13
B 2
B 1
B 3
a б
рис. 3
На рис. 3, б, в соответствии с выведенным правилом, дана схема по строения дополнительной проекции на плоскость π3⊥π2, по которой проис ходит переход от системы π1/π2 к системе π2/π3.
2. Преобразование эпюра путём дополнительного ортогонально го проецирования.
Задача 1.Преобразовать эпюр так, чтобы пря мая l общего положения стала линией уровня (рис. 4).
Поскольку прямая линия l не параллельна ни одной из исходных плоскостей, то зададим новую плоскость π3, перпендикуляр
ную либо π1, либо π2 и параллельную данной прямой l. Это значит, что на эпюре появится новая ось х13, или х23, параллельная соответствующей проекции прямой.
На рис. 4 новая плоскость π3 выбрана перпен дикулярно π2. Поэтому на эпюре ось х23 проведена параллельно l2.
В дальнейшем замену плоскостей проекций бу дем записывать так:
π3⊥π2, π3l ⇒х23l2, где справа дана запись для пространства, слева
– для эпюра. Чтобы построить новую проекцию прямой, за
x 1 2
A 2
A 1
A 3
x 2 3
B 2
B 1
B 3
l 1
l 2
l 3
рис. 4

35
дадим на ней две произвольные точки А и В. По схеме рис. 3, б находим А3 и В3, через которые пройдёт проекция l3.Равные расстояния на чертеже отме чены одинаковым количеством чёрточек.
В третье поле отрезок АВ проецируется в натуральную величину. Задача 2. Преобразовать
эпюр так, чтобы прямая линия об щего положения стала проецирую щей (рис. 5).Для решения задачи необходимо выполнить две замены плоскостей проекций. Первой заме ной прямую CD делаем линией уровня, второй заменой – проеци рующей.
1. π3⊥π1, π3CD ⇒ х13C1D1
2. π4⊥π3, π4⊥СD ⇒ x34⊥C3D3.
Первой заменой поле π2меняем на π3, второй заменой – π1 на π4. Цепочку этих преобразо ваний символически можно пред ставить так:
π1/π2→π1/π3→π3/π4. Для построения С3D3 замеряем расстояния от точек С2, D2 до оси х12
и откладываем их от оси х13. Чтобы построить С4D4, замеряем расстояние от прямой С1D1 до оси х13 и откладываем его от х34.
Задача 3. Преобразовать эпюр так, чтобы плоскость общего положения стала проецирующей (рис. 6).
Известно, что, если плоскость проходит через перпендикуляр к другой плоскости, то она перпендикулярна этой плоскости. Поэтому, если преобра зовать эпюр так, чтобы какаялибо прямая плоскости стала проецирующей, то и вся плоскость будет проецирующей. Для этой цели удобно использовать линию уровня плоскости, так как её можно сделать проецирующей одной за меной.
Проведём в плоскости Σ(mn) вторую линию уровня АВ (можно пер вую линию уровня) и зададим дополнительную плоскость π3⊥π2 и перпенди кулярную АВ. На эпюре появится ось х23⊥А2В2:
π3 ⊥ π2, π3 ⊥ АВ⇒ х23 ⊥ А2В2.
x 1 2
D 2
С 1
D 3
x 34
C 2
D 1
C 3
x 1 3 C 4 ≡ D 4
рис. 5

36
m 1 n 1
C 1
A 1 B 1
x 1 2
m 2
Σ 3
x 2 3
A 2
C 2
B 2
n 2
A 3 ≡ B 3 C 3
рис. 6
В третьем поле строим А3≡В3. Затем в плоскости берём произвольную точку С и строим С3. След Σ3 данной плоскости пройдёт через А3≡В3 и С3.
Задача 4. Преобразовать эпюр так, чтобы плоскость τ(АВС) общего по ложения стала плоскостью уровня или определить натуральную величину плоской фигуры (рис. 7).
Задачу решаем двумя заменами плоскостей проекций. Сначала плос кость τ сделаем проецирующей, затем плоскостью уровня.
Проведём в плоскости первую линию АD и выполним следующие пре образования:
1. π3⊥π1, π3⊥AD ⇒ x13⊥A1D1 2. π4⊥π3, π3τ ⇒ х34τ3, т.е. 3. π1/π2→π1/π3→π3 /π4. Все построения показаны на рис. 7.

37
C 1
A 1
B 1
x 1 2
Σ 3 x 1
3
A 2
C 2
B 2
A 3
C 3
C 4
B 4
A 4
B 3 x 3 4
D 1
D 2
рис. 7
Преобразовав плоскость τ в плоскость уровня, попутно решили ещё од ну задачу – определили натуральную величину ∆АВС.
3.Метрические задачи Задачи, связанные с определением натуральных величин расстоя
ний, углов, формы и размеров плоской фигуры называются метриче скими.
Условно их можно разделить на следующие группы: 1. Задачи на определение расстояний. 2. Задачи на определение натуральных величин углов. 3. Комплексные задачи на плоскости. 4. Конструктивные задачи в пространстве.
Методика решения задач на определение расстояний Кратчайшим расстоянием между двумя геометрическими образами яв
ляется перпендикуляр, проведённый от одного из них к другому. Этот пер пендикуляр проецируется в натуральную величину в том случае, если будет параллелен плоскости проекций. А такое его расположение возможно лишь тогда, когда один из заданных геометрических образов окажется проеци рующим.
Поэтому для определения натуральной величины расстояния необхо димо:
1. преобразовать эпюр так, чтобы один из заданных геометрических образов стал проецирующим;

38
2. выполнить в дополнительном поле все требуемые построения; 3. вернуться в первоначальную систему. Методики решения остальных групп задач будут рассмотрены на бли
жайших практических занятиях и следующей лекции.
Лекция 6
Задачи комплексные и конструктивные
План лекции 1. Методика решения комплексных задач. 2. Методика решения конструктивных задач. 3. Геометрические места точек. 4. 1.Методика решения комплексных задач Если данные геометрические образы определяют плоскость и в ней не
обходимо выполнить некоторые построения, то необходимо: преобразовать эпюр так, чтобы эта плоскость стала плоскостью уров
ня; выполнить в дополнительном поле требуемые построения; вернуться в исходную систему. Пример 1. Построить прямоугольный треугольник, гипотенузой кото
рого является отрезок АВ, а вершина С прямого угла лежит на прямой m, па раллельной АВ (рис. 1).
m 1
B 3
C 1 D 1
B 1 x 1 2
m 2
A 2
C 2
B 2
C 2 ′
D 2
C 1 ′ A 1
B 4 A 4
C 4 ′
D 4 C 4
m 4
x 3 4
x 23
C 3 ′
A 3 C 3
Σ 3
рис. 1 Поскольку отрезок АВ и прямая линия m параллельны, они определяют
некоторую плоскость Σ общего положения. Плоскость общего положения можно сделать плоскостью уровня двумя заменами. Для этого в плоскости Σ
39
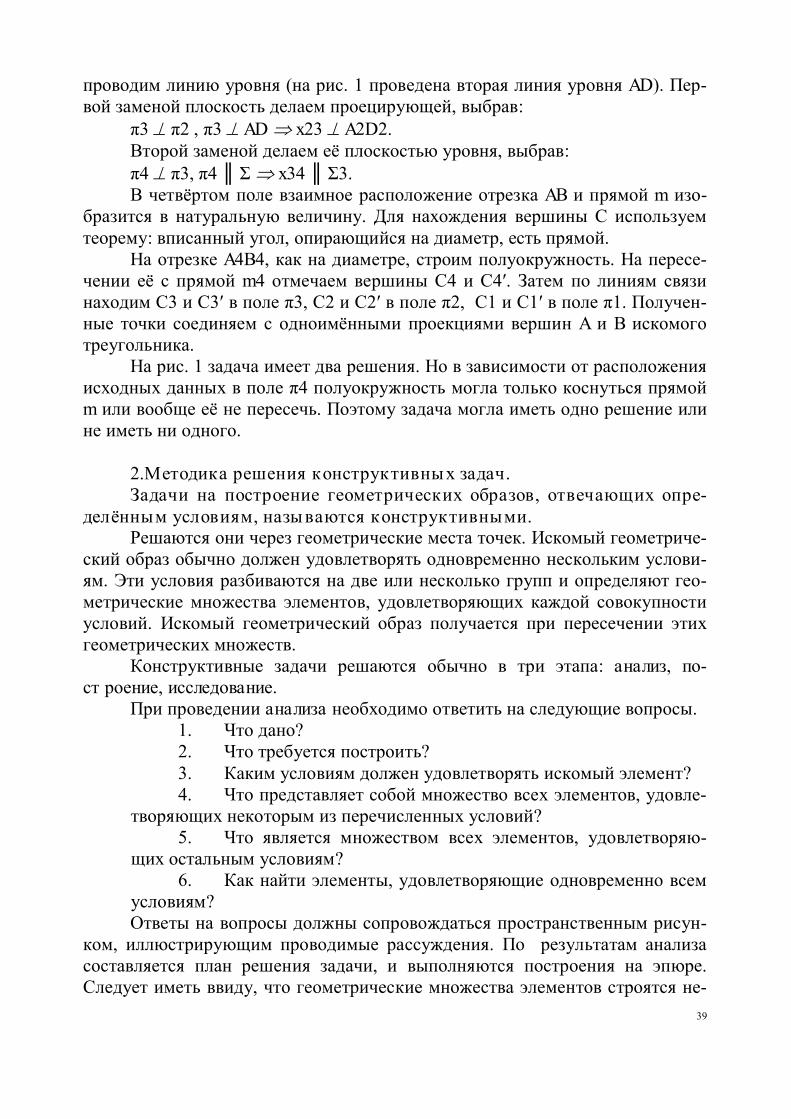
проводим линию уровня (на рис. 1 проведена вторая линия уровня АD). Пер вой заменой плоскость делаем проецирующей, выбрав:
π3 ⊥ π2 , π3 ⊥ AD ⇒ х23 ⊥ A2D2. Второй заменой делаем её плоскостью уровня, выбрав: π4 ⊥ π3, π4 Σ ⇒ х34 Σ3. В четвёртом поле взаимное расположение отрезка АВ и прямой m изо
бразится в натуральную величину. Для нахождения вершины С используем теорему: вписанный угол, опирающийся на диаметр, есть прямой.
На отрезке А4В4, как на диаметре, строим полуокружность. На пересе чении её с прямой m4 отмечаем вершины С4 и С4′. Затем по линиям связи находим С3 и С3′ в поле π3, С2 и С2′ в поле π2, С1 и С1′ в поле π1. Получен ные точки соединяем с одноимёнными проекциями вершин А и В искомого треугольника.
На рис. 1 задача имеет два решения. Но в зависимости от расположения исходных данных в поле π4 полуокружность могла только коснуться прямой m или вообще её не пересечь. Поэтому задача могла иметь одно решение или не иметь ни одного.
2.Методика решения конструктивных задач. Задачи на построение геометрических образов, отвечающих опре
делённым условиям, называются конструктивными. Решаются они через геометрические места точек. Искомый геометриче
ский образ обычно должен удовлетворять одновременно нескольким услови ям. Эти условия разбиваются на две или несколько групп и определяют гео метрические множества элементов, удовлетворяющих каждой совокупности условий. Искомый геометрический образ получается при пересечении этих геометрических множеств.
Конструктивные задачи решаются обычно в три этапа: анализ, по ст роение, исследование.
При проведении анализа необходимо ответить на следующие вопросы. 1. Что дано? 2. Что требуется построить? 3. Каким условиям должен удовлетворять искомый элемент? 4. Что представляет собой множество всех элементов, удовле
творяющих некоторым из перечисленных условий? 5. Что является множеством всех элементов, удовлетворяю
щих остальным условиям? 6. Как найти элементы, удовлетворяющие одновременно всем
условиям? Ответы на вопросы должны сопровождаться пространственным рисун
ком, иллюстрирующим проводимые рассуждения. По результатам анализа составляется план решения задачи, и выполняются построения на эпюре. Следует иметь ввиду, что геометрические множества элементов строятся не
40
посредственно в том поле , в котором они будут использоваться. В исходные поля переносится только конечный результат.
В процессе исследования необходимо выяснить, сколько решений мо жет иметь задача.
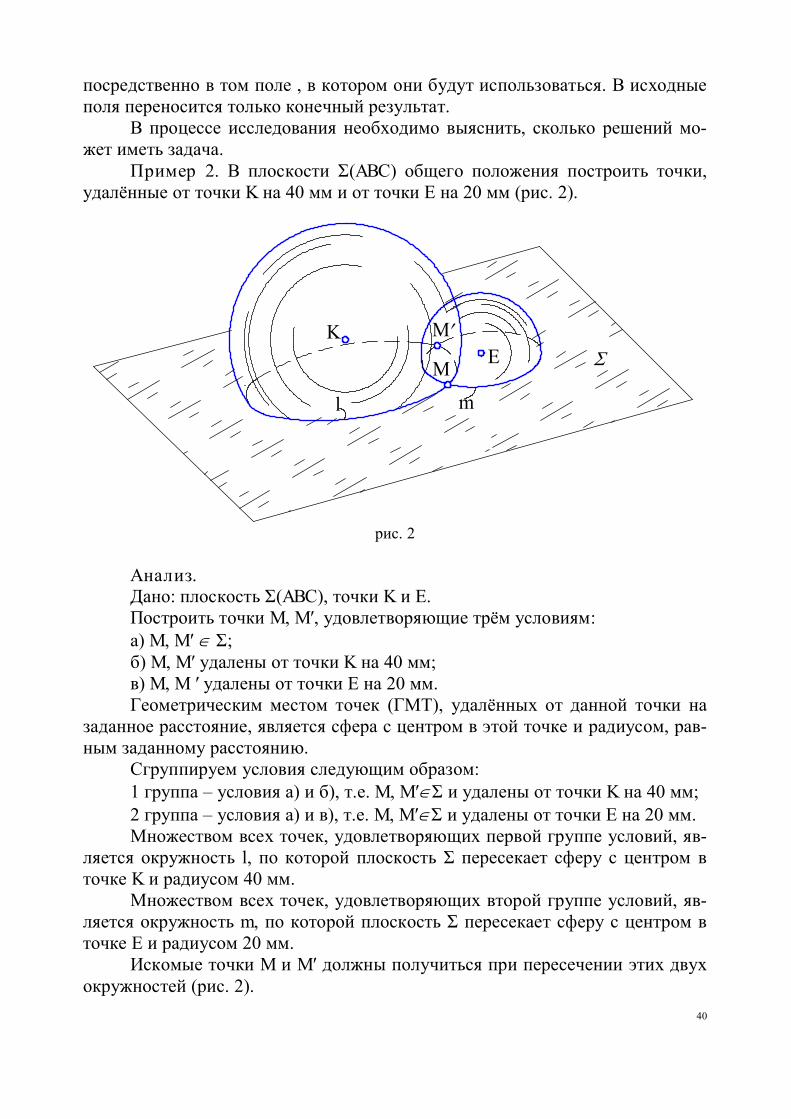
Пример 2. В плоскости Σ(АВС) общего положения построить точки, удалённые от точки K на 40 мм и от точки Е на 20 мм (рис. 2).
m
K E
M′
M
l
Σ
рис. 2
Анализ. Дано: плоскость Σ(АВС), точки K и Е. Построить точки М, М′, удовлетворяющие трём условиям: а) М, М′ ∈ Σ; б) М, М′ удалены от точки K на 40 мм; в) М, М ′ удалены от точки Е на 20 мм. Геометрическим местом точек (ГМТ), удалённых от данной точки на
заданное расстояние, является сфера с центром в этой точке и радиусом, рав ным заданному расстоянию.
Сгруппируем условия следующим образом: 1 группа – условия а) и б), т.е. М, М′∈Σ и удалены от точки K на 40 мм; 2 группа – условия а) и в), т.е. М, М′∈Σ и удалены от точки Е на 20 мм. Множеством всех точек, удовлетворяющих первой группе условий, яв
ляется окружность l, по которой плоскость Σ пересекает сферу с центром в точке K и радиусом 40 мм.
Множеством всех точек, удовлетворяющих второй группе условий, яв ляется окружность m, по которой плоскость Σ пересекает сферу с центром в точке Е и радиусом 20 мм.
Искомые точки М и М′ должны получиться при пересечении этих двух окружностей (рис. 2).

41
План решения задачи. 1. Преобразуем эпюр так, чтобы плоскость Σ стала проеци
рующей. 2. В плоскости π3 строим сферу с центром K3. 3. В плоскости π3 строим сферу с центром Е3. 4. Строим линии пересечения плоскости Σ с каждой сферой. 5. Отмечаем точки пересечения построенных окружностей. 6. Возвращаем полученные точки в исходную систему.
Построение. В плоскости Σ проводим вторую линию уровня СМ (рис. 3) и произво
дим замену, выбрав новую плоскость π3: π3 ⊥ π2, π3 ⊥ СМ⇒х23 ⊥ С2М2. Строим в третьем поле Σ3, K3, Е3 и проводим проекции сфер радиуса
ми 20 мм и 40мм.
m 4
B 1
B 2
A 1
А 2
C 1 D 1
C 2
D 2
x 1 2
x 2 3
M 1
K 1 M 1 ′
E 1
E 2 M 2 ′
M 2
E 3 M 3 ′
M 3
Σ 3
x 3 4
K 2
K 3
K 4
M 4 ′
E 4 M 4
l 4
r 1
r 2
r 1
r 2
рис. 3
Чтобы получить окружности сечения в натуральную величину, выпол няем ещё одну замену: π4 ⊥ π3, π4Σ ⇒х34Σ3. Строим в поле π4 точки K4, Е4 и проводим окружности l4 и m4.
Отмечаем точки пересечения окружностей l4∩m4=D4, F4.

42
Обратным проецированием переносим полученные точки в исходную систему.
Исследование. В зависимости от взаимного расположения точек K, Е и плоскости Σ окружности l и m могут пересечься, коснуться или не пересечь ся. В соответствии с этим задача может иметь два, одно или ни одного реше ния.
В данном конкретном случае задача имеет два решения.
3.Геометрические места точек. Множество точек, удовлетворяющих одним и тем же условиям, на
зывается геометрическим местом точек (ГМТ). Рассмотрим некоторые из них.
ГМТ, равноудалённых от данной точки, является сфера с центром в этой точке и радиусом, равным заданному расстоянию (рис. 4, а).
ГМТ, равноудалённых от двух данных точек, является плоскость, пер пендикулярная отрезку, соединяющему эти точки и проходящая через его се редину (рис. 4, б).
ГМТ, равноудалённых от трёх данных точек, являются на плоскости центр окружности, описанной около этих точек (рис. 4, в), в пространстве – прямая, перпендикулярная плоскости, определённой этими точками и прохо дящая через центр описанной около них окружности (рис. 4, г). Можно счи тать, что в пространстве таким ГМТ является ось прямого кругового цилинд ра, основание которого проходит через заданные точки (рис. 4, д).
m А
C
B D
Σ
А А
А А
А
B
B
B B
C
C
C О О
О
О
О
m
а б в
г д е
рис. 4 ГМТ, равноудалённых от четырёх данных точек, является центр сферы,
описанной около этих точек (рис. 4, е). ГМТ, равноудалённых от сторон угла, является плоскость, проходящая
через биссектрису угла перпендикулярно плоскости угла (рис. 5, а).

43
ГМТ, равноудалённых от данной плоскости τ, являются две плоскости Σ и γ, параллельные данной плоскости и расположенные по разные стороны от неё на заданном расстоянии (рис. 5, б).
h d
b
Σ
c
a б Σ
τ
γ
рис. 5
Геометрическим множеством прямых линий (ГМП), равноудалённых от данной прямой а, является прямой круговой цилиндр, осью которого служит данная прямая. Радиус основания равен заданному расстоянию (рис. 6, а).
ГМП, проходящих через фиксированную точку Апод заданным углом α к некоторой плоскости γ, является прямой круговой конус с вершиной в фик сированной точке, с осью, перпендикулярной плоскости, и углом при основа нии, равным заданному углу (рис. 6, б).
ГМП, равноудалённых от данной точки, являются прямые, касающиеся сферы с центром в этой точке, и радиусом, равным заданному расстоянию l (рис. 6, в).
α
A a б
γ
a
r= l
в
r=l
A
рис. 6
При решении конструктивных задач путём логических рассуждений могут быть сконструированы и другие ГМТ и ГМП. При этом важно не только представить ГМТ и ГМП, но и уметь его построить. Следует иметь в виду, что на эпюре любое ГМТ или ГМП можно строить только тогда, когда опре

44
деляющие его элементы займут частное положение относительно плоскостей проекций.
Например, ГМТ, равноудалённых от данной точки А и прямой m, явля ется парабола (рис. 7).
R1≡ l1
R3≡ l3
R2≡ l2
l1
l2
l3
m
A
O
рис. 7
Точка и прямая определяют плоскость. Поэтому, чтобы построить па раболу, сначала необходимо преобразовать эпюр так, чтобы эта плоскость стала плоскостью уровня, а затем выполнить построения согласно определе нию ГМТ.
Вопросы для самопроверки по разделу “Метрические задачи” 1. Какими способами можно выполнить преобразование эпюра? 2. Сформулировать правило построения дополнительной ортогональ
ной проекции по двум данным ортогональным проекциям. 3. Способы определения натуральной величины отрезка. 4. Сколько раз и каким образом необходимо заменить плоскость проек
ций, чтобы прямая общего положения стала проецирующей? 5. Сформулировать теорему школьного курса геометрии, лежащую в
основе преобразования плоскости общего положения в проецирующую плос кость.

45
6. Перечислить этапы преобразования плоскости общего положения в плоскость уровня путём замены плоскостей проекций.
7. Дать определение метрических задач. 8. На какие группы можно разделить все метрические задачи? 9. Методика решения задач на определение расстояний. 10. Сформулировать теорему о проецировании прямого угла. 11. На каком этапе решения задачи на определение расстояний приме
няется теорема о проецировании прямого угла? 12. Методики решения задач на определение величин углов между
скрещивающимися прямыми, прямой линией и плоскостью, двумя плоско стями.
13. Каким методом определяется натуральная величина угла между двумя пересекающимися прямыми?
14. Сформулировать теорему о перпендикуляре к плоскости. 15. Перечислить задачи, в решении которых используется теорема о
перпендикуляре к плоскости. 16. Методика решения комплексных задач. 17. Дать определение конструктивных задач. 18. В чём разница между комплексными и конструктивными задачами? 19. Охарактеризовать этапы решения конструктивной задачи. 20. Дать определение геометрического места точек (ГМТ) и геометри
ческого множества прямых (ГМП). 21. Примеры наиболее распространённых ГМТ. 22. Примеры наиболее распространённых ГМП.
Лекция 7
Тени в ортогональных проекциях
План лекции
1. Тени собственные и падающие. 2. Задание источника освещения. 3. Тени точки. 4. Тени прямой линии. 5. Закономерности построения теней от прямолинейных контуров. Любое здание и сооружение, озарённое солнцем, производит на наблю
дателя более полное зрительное впечатление, чем в пасмурную погоду. Пол нота зрительного восприятия создаётся благодаря наличию теней на фасадах зданий. Тени позволяют чувствовать рельефность поверхности, пропорцио нальность отдельных элементов здания. Ещё древние считали, что рельеф ность "происходит от теней и светов, или, другими словами, от светлого и тёмного". Это формообразующее свойство светотени использовалось архи
46
текторами на протяжении всей истории архитектуры. Естественно, что и ар хитектурные чертежи сопровождаются изображением светотеней.
1. Собственные и падающие тени. Тени возникают лишь при наличии источника освещения. Они бывают
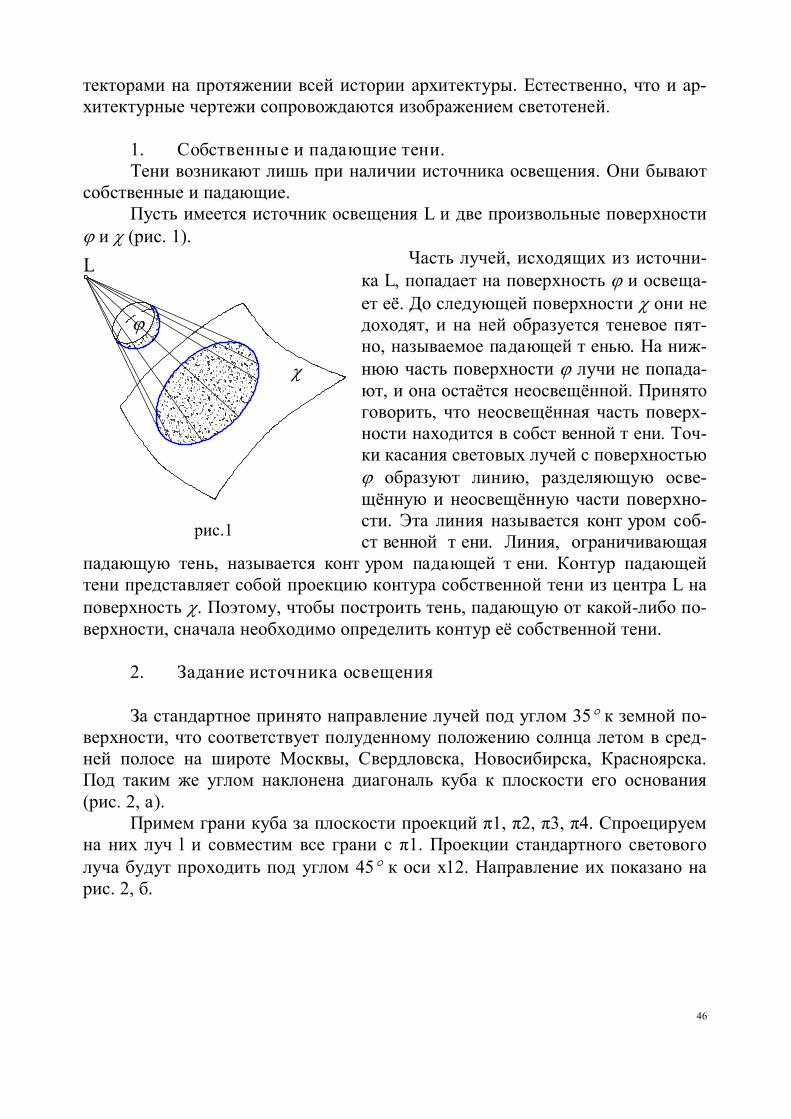
собственные и падающие. Пусть имеется источник освещения L и две произвольные поверхности
ϕ и χ (рис. 1). Часть лучей, исходящих из источни
ка L, попадает на поверхность ϕ и освеща ет её. До следующей поверхности χ они не доходят, и на ней образуется теневое пят но, называемое падающей т енью. На ниж нюю часть поверхности ϕ лучи не попада ют, и она остаётся неосвещённой. Принято говорить, что неосвещённая часть поверх ности находится в собст венной т ени. Точ ки касания световых лучей с поверхностью ϕ образуют линию, разделяющую осве щённую и неосвещённую части поверхно сти. Эта линия называется конт уром соб ст венной т ени. Линия, ограничивающая
падающую тень, называется конт уром падающей т ени. Контур падающей тени представляет собой проекцию контура собственной тени из центра L на поверхность χ. Поэтому, чтобы построить тень, падающую от какойлибо по верхности, сначала необходимо определить контур её собственной тени.
2. Задание источника освещения
За стандартное принято направление лучей под углом 35° к земной по верхности, что соответствует полуденному положению солнца летом в сред ней полосе на широте Москвы, Свердловска, Новосибирска, Красноярска. Под таким же углом наклонена диагональ куба к плоскости его основания (рис. 2, а).
Примем грани куба за плоскости проекций π1, π2, π3, π4. Спроецируем на них луч l и совместим все грани с π1. Проекции стандартного светового луча будут проходить под углом 45° к оси х12. Направление их показано на рис. 2, б.
L
ϕ
χ
рис.1

47
π 2
х 1 2
l 4
б а
45Å
45Å 35Å
l 2
l 1
l 3 l
π 4 π 3
π 1
l 4 l 1 l 3
х 1 2
l 2
рис. 2
3. Тени точки
Построить тень от точки на плоскость или поверхность геометрически означает построить точку пересечения луча, проходящего через эту точку, с плоскостью или поверхностью (рис. 3).
Пример 1. Построить тени от точки Ана плоскости проекций. Через А1 проводим луч, параллельный l1, через А2 – параллельный l2.
Тень окажется на той плоскости, которую световой луч пересечёт раньше. На рис. 4 тень упала на π1, которая обозначается tA1 и называется дейст вит ель ной. В случае необходимости строят мнимую т ень на плоскость π2, которая обозначена tA2м. Построение её показано штриховой линией. Действитель ная и мнимая тень должны находиться на одном уровне.
A 1
A 2
tA
tA2 M tA1
ϕ
L
A
l 2
l 1 х 1 2
рис. 3 рис. 4

48
Пример 2. Построить тень от точки В на вертикальную стену (рис. 5). Вертикальная стена – это проецирующая плоскость. Построение тени
сводится к нахождению точки пересечения луча с проецирующей плоско стью.
х 1 2
B 2
B 1
tB
A 1 х 1 2
B 1 2 1
1 1
E 1
D 1
C 1
B 2 A 2
E 2 D 2 C 2
2 2
1 2
tE1
tE2
рис. 5 рис. 6
Пример 3. Построить тень от точки на скат крыши (рис. 6). Скат крыши – плоскость общего положения. Построение тени сводится
к нахождению точки пересечения луча с плоскостью общего положения. Ре шаем методом вспомогательной секущей плоскости.
4. Тени прямой линии Построить тень от прямой линии на плоскость или поверхность значит
решить геометрическую задачу: построить линию пересечения лучевой плос кости, проходящей через прямую, с данной плоскостью или поверхностью (рис. 7).
Пример 4. Построить тень от отрезка АВ на плоскости проекций (рис. 8).
ϕ
L а
ta
tB1
x 1 2
A 1
B 2
B 1
tB2 M
tA2
A 2 рис. 7 рис. 8
49
Чтобы построить тень от прямой линии на плоскость, достаточно по строить тень от двух точек.
Тень от точки Аупала на π2, от В – на π1. Это значит, что тень от отрез ка пойдёт сначала по одной плоскости, затем преломится на другую. По скольку соединять можно только точки одного поля, то необходимо постро ить мнимую тень любого конца. На рис.8 определена мнимая тень tВ2м. Со единяем tА2 с tВ2м, и в точке пересечения этой прямой с осью х12 преломля ем её на π1.
5. Закономерности построения теней от прямолинейных конту ров
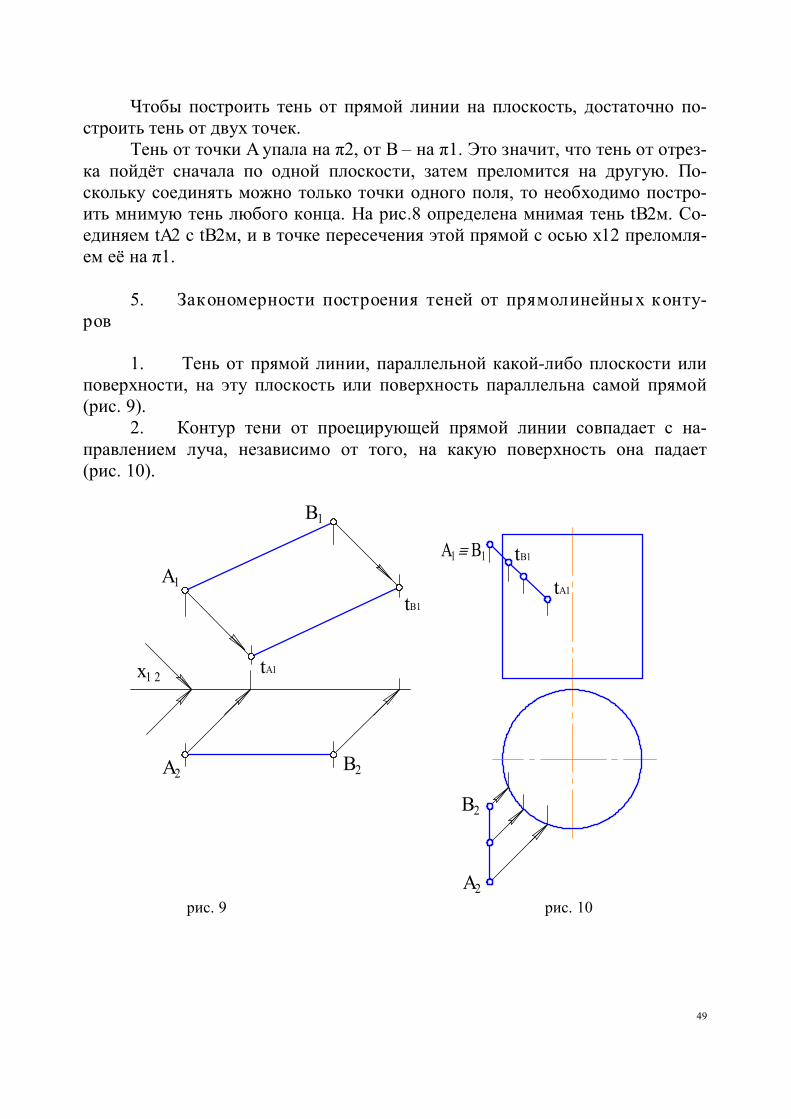
1. Тень от прямой линии, параллельной какойлибо плоскости или поверхности, на эту плоскость или поверхность параллельна самой прямой (рис. 9).
2. Контур тени от проецирующей прямой линии совпадает с на правлением луча, независимо от того, на какую поверхность она падает (рис. 10).
x 1 2
A 1
A 2
tB1
tA1
B 2
B 1
B 2
tB1
A 2
tA1
A 1 ≡ B 1
рис. 9 рис. 10

50
3. Контур тени от вертикальной прямой на поверхность, образую щие которой горизонтальны, повторяет контур нормального сечения поверх ности, повёрнутый вправо (рис. 11).
4. Контур тени от горизонтальной прямой на поверхность, обра зующие которой вертикальны, повторяет контур нормального сечения по верхности, кверху (рис. 12).
tA1
A 1
B 1
A 2 ≡ B 2
tA2
рис. 11 рис. 12
5. Контур тени от плоской фигуры на параллельную плоскость по вторяет форму и размеры самой фигуры (рис. 13).
6. Точка, в которой тень соскальзывает с одной поверхности на дру гую, называется точкой исчезновения. Точка исчезновения К и точка tk пере сечения падающих теней находятся на одном луче (рис. 14).
Знание закономерностей позволяет сократить процесс построения те ней.
O 1
O 1
to
1 1
1 2 2 2
t3
4 2
t4
K
t 2
tk 3 2
рис. 13 рис. 14
51
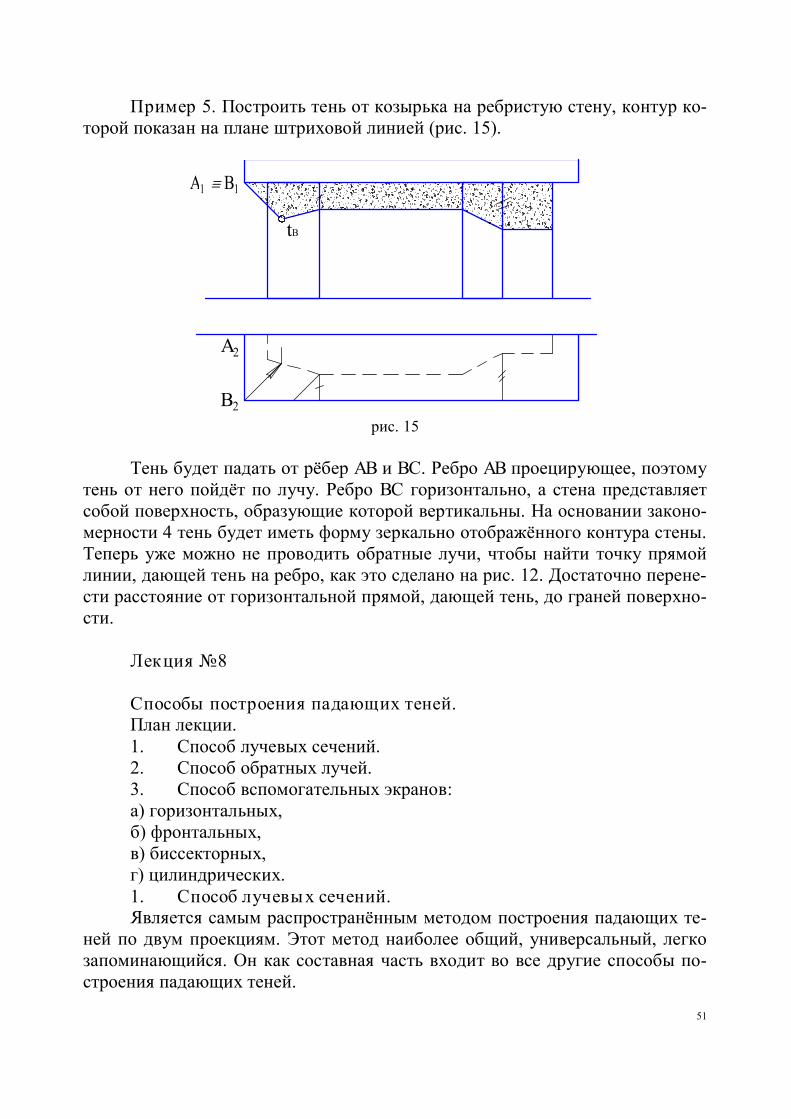
Пример 5. Построить тень от козырька на ребристую стену, контур ко торой показан на плане штриховой линией (рис. 15).
tB
A 1 ≡ B 1
A 2
B 2 рис. 15
Тень будет падать от рёбер АВ и ВС. Ребро АВ проецирующее, поэтому тень от него пойдёт по лучу. Ребро ВС горизонтально, а стена представляет собой поверхность, образующие которой вертикальны. На основании законо мерности 4 тень будет иметь форму зеркально отображённого контура стены. Теперь уже можно не проводить обратные лучи, чтобы найти точку прямой линии, дающей тень на ребро, как это сделано на рис. 12. Достаточно перене сти расстояние от горизонтальной прямой, дающей тень, до граней поверхно сти.
Лекция 8
Способы построения падающих теней. План лекции. 1. Способ лучевых сечений. 2. Способ обратных лучей. 3. Способ вспомогательных экранов: а) горизонтальных, б) фронтальных, в) биссекторных, г) цилиндрических. 1. Способ лучевых сечений. Является самым распространённым методом построения падающих те
ней по двум проекциям. Этот метод наиболее общий, универсальный, легко запоминающийся. Он как составная часть входит во все другие способы по строения падающих теней.

52
Сущность метода состоит в том, что для построения падающей на по верхность тени точки необходимо:
а) заключить световой луч, проведённый через точку, во вспомогатель ную секущую плоскость, называемую лучевой;
б) построить линию пересечения данной поверхности с лучевой плос костью;
в) отметить точку пересечения светового луча с построенной линией. Полученная точка является искомой тенью.
По существу это решение задачи на построение точки пересечения прямой линии с поверхностью. В качестве секущей выбирается проецирую щая плоскость.
На рис. 1 показано построение тени от точки В на поверхность валика. Для рационализации построения сначала задаём несколько горизон
тальных плоскостей и строим на π2 сечения ими поверхности. Затем заклю чаем луч в горизонтально проецирующую плоскость. Отмечаем точки пере сечения её с окружностями сечений и по линиям связи переносим их на соот ветствующие плоскости в π1. Соединив точки плавной линией, получаем се чение поверхности валика лучевой плоскостью. При пересечении первой проекции светового луча с построенным сечением получаем tВ1. По линии связи находим tB2.
В 1
В 2
tВ 1
tВ 2
рис. 1 рис. 2

53
Если требуется построить тень от некоторой линии на криволинейную по верхность (рис.2), то на этой линии выбирается несколько точек и от каждой из них строится тень. Затем полученные точки соединяют плавной линией.
2. Способ обратных лучей.
Применяется для построения теней, падающих от одного объекта на другой (особенно удобен, когда один или оба объекта ограничены поверхно стями, включающими прямые линии или окружности).
Способ заключается в следующем. От линий первого и второго объек тов строятся падающие тени на одну плоскость, преимущественно плоскость уровня. Из точек пересечения этих теней проводится обратный луч до встре чи с линией, давшей тень. Именно так построена тень от отрезка КМ на по верхность пирамиды (рис. 3).
S 1
S 2
tK
M 1
K 1
M 2
K 2
tM
tS
рис. 3
Этим методом определяются и точки исчезновения.
54
3. Способ вспомогательных экранов. Вспомогат ельными экранами называют вспомогат ельные плоскост и
или поверхност и, пересекающие поверхност ь, на кот орую ст роит ся падаю щая т ень.
Способ применяется для построения падающих теней на поверхности, которые могут быть пересечены по прямой или окружности, т.е. в тех же слу чаях, когда применяется способ обратных лучей. Поэтому оба способа часто используются совместно, как дополняющие друг друга.
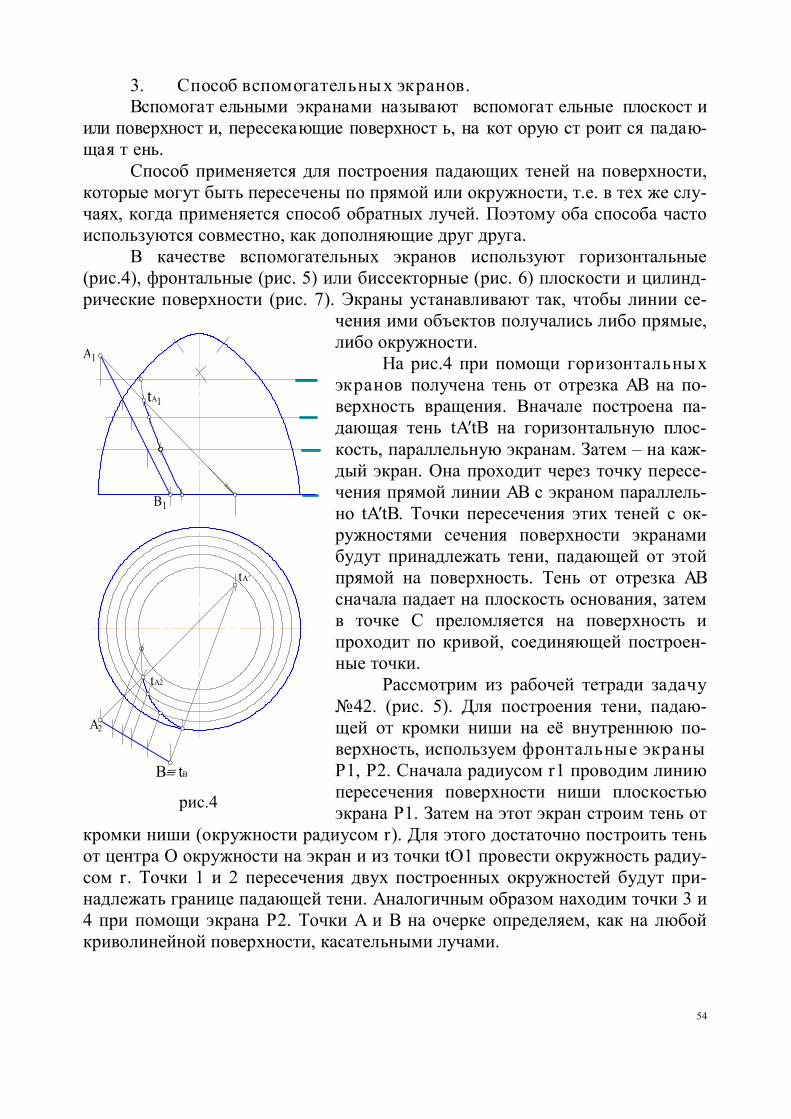
В качестве вспомогательных экранов используют горизонтальные (рис.4), фронтальные (рис. 5) или биссекторные (рис. 6) плоскости и цилинд рические поверхности (рис. 7). Экраны устанавливают так, чтобы линии се
чения ими объектов получались либо прямые, либо окружности.
На рис.4 при помощи горизонтальных экранов получена тень от отрезка АВ на по верхность вращения. Вначале построена па дающая тень tА′tВ на горизонтальную плос кость, параллельную экранам. Затем – на каж дый экран. Она проходит через точку пересе чения прямой линии АВ с экраном параллель но tA′tB. Точки пересечения этих теней с ок ружностями сечения поверхности экранами будут принадлежать тени, падающей от этой прямой на поверхность. Тень от отрезка АВ сначала падает на плоскость основания, затем в точке С преломляется на поверхность и проходит по кривой, соединяющей построен ные точки.
Рассмотрим из рабочей тетради задачу 42. (рис. 5). Для построения тени, падаю щей от кромки ниши на её внутреннюю по верхность, используем фронтальные экраны P1, P2. Сначала радиусом r1 проводим линию пересечения поверхности ниши плоскостью экрана Р1. Затем на этот экран строим тень от
кромки ниши (окружности радиусом r). Для этого достаточно построить тень от центра О окружности на экран и из точки tO1 провести окружность радиу сом r. Точки 1 и 2 пересечения двух построенных окружностей будут при надлежать границе падающей тени. Аналогичным образом находим точки 3 и 4 при помощи экрана Р2. Точки А и В на очерке определяем, как на любой криволинейной поверхности, касательными лучами.
A 1
tA 1
B 1
A 2
B≡ tB
tA2
tA′
рис.4

55
r
r1
r2 P 2
P 1
B 2
3 O 1
4
4
1
r r
r 1
t0 1
t0 2
O 2
рис. 5
Тень от окружности на цилиндрическую поверхность можно построить так же, как это было сделано на скоции в задаче 34. Но есть и другой спо соб – использование биссекторного экрана.
Задача 43 (рис. 6). Требуется построить тень от цилиндрической плиты на цилиндрическую колонну.
На каждой поверхности определяем контур собственной тени и прово дим биссекторный экран Р. Биссект орный экран – эт о плоскост ь, проходя щая через биссектрису угла между осями симметрии, т.е. под углом 45° к ним.

56
x x x x 0,7R
2 3 4 5
t2
2
1
3
4 5
P 2
t3 t4 t5
рис. 6
На экран Р строим тень от нижней кромки плиты, т.е. от окружности радиуса R. Она изображается в виде окружности радиуса 0,7R, равного рас стоянию от оси до образующей плиты, принадлежащей контуру её собствен ной тени.
Затем берём вполне конкретные образующие цилиндра 2, 3, 4, 5 и стро им их тени t2, t3, t4, t5 на биссекторный экран. Точки пересечения теней об разующих и окружности обратными лучами возвращаем на соответствующие образующие цилиндра. Через них и проходит контур падающей тени.
Все рассмотренные построения можно выполнить по одной проекции. На рис.6 взято два изображения (план и фасад) лишь для того, чтобы устано вить правила определения положений образующих и их теней на фасаде. Так, образующие 3 и 5 совпадают с контуром собственной тени колонны, 4 – с осью, 2 – с левой очерковой образующей. Положение теней t2, t3, t4 можно получить, разделив диаметр колонны на четыре равные части (на чертеже они обозначены буквой х). Тень t5 совпадает с самой образующей.
Если тень строится от квадратной плиты на круглую форму (задача 44), то целесообразно использовать не плоскости, а цилиндриче ские экраны. Объясняется это тем, что, на основании закономерности 4 по строения падающих теней, контуром тени от нижнего горизонтального ребра
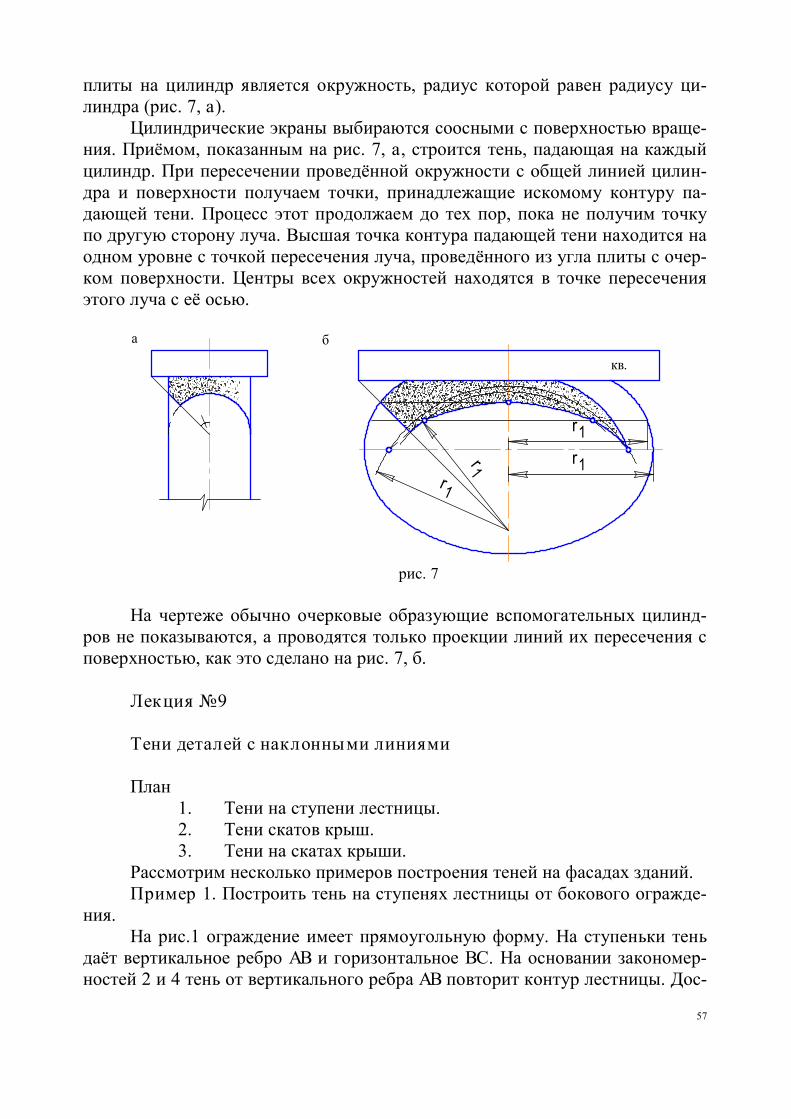
57
плиты на цилиндр является окружность, радиус которой равен радиусу ци линдра (рис. 7, а).
Цилиндрические экраны выбираются соосными с поверхностью враще ния. Приёмом, показанным на рис. 7, а, строится тень, падающая на каждый цилиндр. При пересечении проведённой окружности с общей линией цилин дра и поверхности получаем точки, принадлежащие искомому контуру па дающей тени. Процесс этот продолжаем до тех пор, пока не получим точку по другую сторону луча. Высшая точка контура падающей тени находится на одном уровне с точкой пересечения луча, проведённого из угла плиты с очер ком поверхности. Центры всех окружностей находятся в точке пересечения этого луча с её осью.
кв.
r 1
r 1
r 1r 1
б а
рис. 7
На чертеже обычно очерковые образующие вспомогательных цилинд ров не показываются, а проводятся только проекции линий их пересечения с поверхностью, как это сделано на рис. 7, б.
Лекция 9
Тени деталей с наклонными линиями
План 1. Тени на ступени лестницы. 2. Тени скатов крыш. 3. Тени на скатах крыши.
Рассмотрим несколько примеров построения теней на фасадах зданий. Пример 1. Построить тень на ступенях лестницы от бокового огражде
ния. На рис.1 ограждение имеет прямоугольную форму. На ступеньки тень
даёт вертикальное ребро АВ и горизонтальное ВС. На основании закономер ностей 2 и 4 тень от вертикального ребра АВ повторит контур лестницы. Дос

58
таточно замерить расстояние от А3В3 до каждого подступёнка и отложить его вправо от А1В1. От проецирующего ребра ВС тень пойдёт по лучу.
tВ
B 1 ≡C 1
A 1 A 3
B 3 C 3
рис. 1
На рис.2 верхняя грань ограждения наклонная. Обратными лучами, проведёнными от верхнего и нижнего углов ступеньки, на ребре В3С3 нахо дим точки Е3 и D3, дающие тень соответственно на верхнее и нижнее ребро подступёнка. Переносим их на В1С1. Из D1 и Е1 проводим лучи под углом 45° и определяем положение tE и tD. Соединив их, получим тень от DE на первый подступёнок. Проведя аналогичные построения с каждым подступён ком, можно заметить, что тени на всех подступёнках от ребра ВС параллель ны между собой и проходят строго друг под другом. Это возможно лишь в том случае, когда В3С3 окажется параллельной прямой, касающейся верхних рёбер всех ступенек. Именно такой вариант и представлен на рис.2.
C 1
E 1 D 1 B 1
A 1
B 3 D 3
E 3
C 3
A 3
tD
tE
рис. 2
Это ещё одна закономерность построения падающих теней. Её необхо димо запомнить и активно применять на практике.
Пример 2. Построить тень, падающую от двускатной крыши на фасад здания.

59
На рис.3 угол α между скатами крыши больше 90°. В таком случае оба ската освещены и оба дадут тень на фасад. Поскольку скаты CD и DE парал лельны фронтону, то тени от них пойдут им параллельно. Глубина тени будет зависеть от удалённости свесов и края крыши от стен постройки.
Обозначим расстояние свеса крыши до боковой стены буквой а. Вы ступ края крыши над фронтоном – буквой b.
Если a>b1, то tC не попадёт на фронтон, а тень проходит близко к ска там.
Если а=b2, то tC попадёт на угол постройки, и скат CD полностью даёт тень на фронтон. От скатов тень пройдёт дальше, чем в первом случае.
Наконец, если а<b3, то на фронтон тень упадёт не только от скатов CD и DE, но и от свеса, проходящего через точку С. Тень в этом случае будет са мая глубокая.
в1
в2
в3
a
C 1 tc tc′
tc′′
D 1
E 1
C 2 ′′ C 2 ′ C 2
A
A
C
C B
B
tA
рис. 3 рис. 4
На рис.4 угол между скатами меньше 90°. На скат ВС свет не попадает, следовательно, он находится в собственной тени. На фронтоне тени от этого ската не будет.
Пример 3. Построить падающую тень от трубы на скат крыши и от крыши на стену (рис.5).

60
A C
B
1 2≡3 1≡2 3
B
t2 t3
AC
tA
t1
tA
1
2 3
α α
рис. 5
Чтобы легче было определить контур собственной тени трубы, можно вычер тить её проекцию на виде сверху и провести касательные лучи.
Тень от трубы можно построить, не прибегая ко второй проекции, а ис пользуя только закономерности. На основании закономерности 3 тени от вер тикальных рёбер, проходящих через вершины 1 и 3, пойдут параллельно ска ту крыши. Из точек пересечения рёбер со скатом крыши проводим прямые под углом α (таков уклон крыши) до встречи с лучами, выходящими из вер шин 1 и 3. Получаем t1 и t3. Ребро 32 параллельно скату. Следовательно, t3t2 пойдёт параллельно ребру. Ребро 12 проецирующее. Тень от него пошла по лучу.
Передняя грань трубы является продолжением стены. Стена врезается в крышу. Слева тень на стену падает от наклонного выступа АВ крыши, справа – от проецирующего ребра АС. Эти тени строим по двум проекциям.
Семестр 2
ЛЕКЦИЯ 10
ОСНОВНЫЕ ПРИНЦИПЫ РАБОТЫ В СРЕДЕ AutoCAD
1. Запуск программы Установленную программу можно запустить четырьмя способами:
с рабочего стола (ярлык); использование кнопки «Пуск»; с помощью диалогового окна проводника Windows.

61
Программа загружает ассоциированные файлы, имеющие следующие расширения:
dwg стандартный формат файла для сохранения вектор ной графики, созданной в AutoCAD;
dws файл шаблона со стандартными определениями име нованных объектов чертежа;
dxf файл рисунка в текстовом или двоичном формате, используемый для обмена с другими приложениями. После загрузки в про грамму его следует сохранить с расширением dwg.
После запуска программы на экране монитора могут появиться различ ные варианты графического интерфейса.
2. Графическое окно программы
После загрузки программы появляется графическое окно AutoCAD, ко торое содержит основные элементы его интерфейса и область черчения, где выполняются построение (рис. 1).
рис.1 В заголовке этого окна выводится наименование программы и имя фай
ла. По умолчанию AutoCAD присваивает всякому вновь создаваемому файлу имя Черт еж 1.dwg
Под заголовком окна находится ст рока Меню. В т рет ьей ст роке графического окна находятся стандартная панель
инструментов и панель с выпадающими списками текстовых и размерных стилей.

62
Чет вёрт ая ст рока содержит панель управления слоями и панель свойств объектов.
Самая нижняя строка графического окна называется строкой состояния. В левой её части выводятся координаты X, Y, Z (при плоском черчении коор дината Z всегда равна 0) положения курсора в зоне рисования окна, а в сред ней части находятся кнопки, которые управляют вызовом функциональных команд (Шаг, Сет ка, Привязки и др.). Эти команды могут выполняться Au toCAD во время исполнения любой другой команды.
Выше строки состояния находится окно командная строка, которая по умолчанию состоит из 3 строчек, начинающихся со слова Команда. Любая комбинация символов, набираемая на клавиатуре, автоматически попадает в активную строку команд.
В нижней части рисунка находится одна закладка Модель и одна или несколько закладок Лист. Закладка Модель обеспечивает доступ в простран ство модели, в котором обычно и создаются чертежи. Пространство листа ис пользуется для выполнения компоновки чертежа перед выводом его на пе чать.
Все вводимые команды фиксируются в текстовом окне программы (F2). В любое время можно воспользоваться справочной системой програм
мы (F1).
3. Завершение работы с программой
Чтобы покинуть программу и вернуться на рабочий стол нужно сохра нить нужные файлы:
ФАЙЛСОХРАНИТЬ КАК… Вводим Имя файла Выбираем из списка Тип файла. Указываем путь сохранения документа. Далее нажать кнопку Х, находящуюся в правой части заголовка окна
для его закрытия или меню: ФАЙЛ – ВЫХОД.
4. Настройки параметров чертежа
Единицы измерения 1. Используя пункт меню ФОРМАТ, настроить единицы измерения. 2. Формат единиц. Десятичные представляют линейные величины в
миллиметрах, метрах, футах и т.д. 3. Точность. Количество знаков при введение величин параметров. 4. Выберите формат и точность угловых величин. 5. Проверьте отсутствие флажка в поле По часовой ст релке.

63
По умолчанию базовый угол равен направлению на восток. Направле ние базового угла задаётся относительно положительной полуоси Х текущей пользовательской системы координат ПСК.
Настройка области черчения Графическая зона программы в пространстве МОДЕЛЬ – это бесконеч
ное пространство, в котором изображение модели объекта вычерчивается в натуральную величину. Удобно чертить в выделенной прямоугольной зоне этого пространства. Размеры сторон этого прямоугольника называются ЛИ МИТАМИ ЧЕРТЕЖА.
ФОРМАТ–ЛИМИТЫ. Дробные числа записываются с т очкой. Первая координата – Х, вторая координата – Y. Отделяются друг от
друга запят ой. Многих ошибок можно избежать, если блокировать ввод точек объек
тов вне области пространства, определённой лимитами чертежа. Для этого можно воспользоваться единственной опцией команды:
1. Формат – Лимиты и посмотрите в командную строку. В ней, кроме запроса программы на ввод координат левого нижнего угла прямоугольной области и значений этих координат по умолчанию в угловых скобках, выве дены опции команды ([Вкл/Выкл]).
2. Введите в командной строке координаты левого нижнего угла и на жмите Enter .
3. Введите координаты правого верхнего угла и нажмите Enter . 4. ВИДЗУММИРОВАНИЕВСЁ. Лимиты чертежа заданы.
Вывод сетки Сетка помогает компоновать создаваемый чертёж. Команда Сетка (F7). Включать и отключать точечную сетку можно также вне диалогового
окна щелчком мыши на кнопке СЕТКА.
Настройка программы Настройка программы при последующих запусках. СЕРВИСНАСТРОЙКА. Используя это диалоговое окно, можно изме
нить: внешний вид окна программы; полосы прокрутки; экранное меню; размер перекрестья курсора; цвет фона рабочего окна AutoCAD; цвет шрифта в командной строке; автоматическое сохранение и создание резервной копии и т.д.

64
Функции правой кнопки мыши могут быть настроены пользователем: СЕРВИСНАСТРОЙКАПОЛЬЗОВАТЕЛЬСКИЕ.
5. Ввод точек и система координат
AutoCAD – это графический редактор который работающет в вектор ном формате. Для создания объектов необходимо не рисовать их на экране монитора. Здесь нужно вводить опорные т очки вычерчиваемых объектов. Программа потом сама построит объект из небольших отрезков.
Для ввода точки, нужна система координат, относительно которой вво дятся координаты точек.
По умолчанию в программе используется мировая система координат МСК. Кроме мировой системы координат в AutoCAD используются и поль зовательские системы координат ПСК, которые можно ориентировать в плоскости черчения в произвольном положении от носит ельно МСК. Важно то, что координаты в каждой из ПСК отсчитываются от её начала.
Способы ввода координат Координаты точек объектов можно вводить двумя способами:
из командной строки; на экране монитора.
Координаты точек объектов можно вводить в декартовой и полярной системе координат. При этом координаты бывают абсолютными и относи тельными.
Абсолют ные декарт овые координат ы: 25.31, 8.34. (Х, Y.) Относи тельно начала координат
От носит ельные декарт овые координат ы: @5.1,34.5. (Эти координа ты отсчитываются от последней введённой точки.)
Абсолют ные полярные координат ы:10.5 <43. (Полярные координаты точки, находящейся на расстоянии 10.5 от начала координат, угол между осью Х и отрезком, соединяющим начало координат и рассматриваемую точ ку, равен 43°.)
От носит ельные полярные координат ы: @12.5<30. (Длина отрезка 12.5 откладывается от предыдущей точки под углом 30°).
Ввод координат на экране монит ора. Координаты точек считываются программой непосредственно с экрана монитора. Для этого достаточно уста новить указатель курсора в нужном месте экрана и щелкнуть левой кнопкой мыши.
Мет од направленного расст ояния. Этот метод позволяет задавать от носительные координаты точки в полярной системе координат непосредст венно на экране монитора. Однако угол – направление к следующей точке – задаётся мышкой, а с клавиатуры вводится лишь расстояние.

65
Работа с командами В AutoCAD команды можно вызывать одним из следующих способов: 1. Из текстового меню программы. 2. При помощи кнопок на панели инструментов. 3. Вызов команды из командной строки по её имени. Любой ввод с клавиат уры завершает ся клавишей Enter. После завершения команды повторно запускайте её следующими спо
собами: нажмите клавишу Enter или Spacebar (Пробел); вызовите контекстное меню правой кнопкой мыши с курсором, уста
новленным на чертёжном поле окна программы, и выберите из него строку Повт орит ь.
Для завершения исполнения текущей команды следует нажать клавишу Esc.
6. Работа с командами функциональной панели
Полярная система координат (F10) Полярная сист ема координат позволяет вводить точки объектов зада
нием расстояния от начала координатной системы или последней введённой точки и угла между осью Х и линией, соединяющей две точки – новую и предыдущую.
Чтобы задать углы поляр ного отслеживания, выполните следующую последовательность настроечных операций.
Меню СЕРВИСРЕЖИМЫ РИСОВАНИЯ
ОТСЛЕЖИВАНИЕ. Сделайт е нуж ные наст ройки (рис. 2).
рис. 2
Шаговая привязка курсора (F9). Сетка (F7). При включённом режиме шаговой привязки (ШАГ) курсор движется
скачкообразно между задаваемыми узлами воображаемой сетки. При этом шаг курсора и шаг сетки не обязательно совпадают. Чтобы настроить шаго вую привязку курсора, выполните следующие настроечные операции.

66
1. Меню СЕРВИС РЕЖИМЫ РИСОВАНИЯ.
2. На вкладке ШАГ И СЕТКА этого диалогового окна установите флажок около поля Шаг Вкл, чтобы включить ша говую привязку курсора.
3. Установите шаг привяз ки курсора по оси Хи по оси Y.
4. В разделе Тип и ст иль привязки установите опции Ша говая привязка и Орт огональная (рис. 3).
рис. 3
Объектное отслеживание (F11) Объектное отслеживание используется для определения координаты
новой точки по характерным точкам уже построенных объектов. Из этих то чек проводятся временные вспомогательные линии отслеживания и новую точку можно указывать на линии отслеживания, например, методом «направ лениерасстояние», или в точке пересечения нескольких линий отслеживания (рис. 4).
рис. 4
Для работы режима необходимо, чтобы была включена объектная при вязка ОТСОБЪЕКТ в строке состояния, с помощью которой происходит за хват уже построенных точек чертежа.
Режим ортогонального построения (F8) Режим ортогонального построения ОРТО позволяет линии располага
ются горизонтально или вертикально в зависимости от направления переме щения курсора. Чтобы на время зафиксировать строящуюся линию в верти

67
кальном или положении горизонтальном положении, достаточно в процессе указания точек удерживать клавишу Shift. Если же нужно, что бы линии все время ориентировалась только в двух указанных направлениях, нажмите кнопку ОРТО в строке состояния (рис. 5).
рис. 5
После перехода в режим ортогонального построения линия, тянущаяся за указателем мыши в процессе создания, перемещения, поворота и копиро вания объектов, будет сохранять вертикальную и горизонтальную ориента цию.
Привязка (F3) Можно настроить работу таким образом, чтобы осуществлялась авто
матическая привязка к конечным или центральным точкам, а так же к ряду других точек существующих объектов (рис. 6).
Рис. 6
Чтобы настроить привязки необходимо: 1. Меню СЕРВИСРЕЖИМЫ РИСОВАНИЯ. 2. На вкладке ОБЪЕКТНАЯ ПРИВЯЗКА этого диалогового окна этого
диалогового окна установите флажок около поля Объект ная привязка Вкл, чтобы включить работу привязки.
3. Щелкнуть на кнопке очист ит ь все.

68
4. Установите флажки около нужных привязок. ОК.
ПРИМИТИВЫ
Отрезки, дуги, окружности и другие графические объекты являются элементами, из которых состоит любой чертёжный файл. В системе AutoCAD они носят название примит ивов.
Типы примитивов Примитивы могут быть простыми и сложными. К прост ым примит и
вам относят следующие объекты: точка, отрезок, круг (окружность), дуга, прямая, луч, эллипс, сплайн, однострочный текст.
К слож ным примит ивам относятся: полилиния, мультилиния, мульти текст (многострочный текст), размер, выноска, допуск, штриховка, вхожде ние блока или внешней ссылки, атрибут, растровое изображение. Кроме т о го, ест ь прост ранст венные примит ивы, видовые экраны и редкие примит и вы.
Построения большей части прими тивов могут быть выполнены с помощью Меню Рисование или кнопок Панели ин ст румент ов (рис. 7).
Панель инст румент ов – это набор кнопок для вызова команд программы, установленных в один ряд на длинном прямоугольном окне с заголовком (по умолчанию располагается вертикально слева).
Построение линий
Основным объектом AutoCAD является линия (отрезок). Линия может строится указанием первой точки и сле дующей (или конечной) точки.
1. РисованиеОт резок. 2. укажите щелчком первую
точку или введите её координаты.
3. Продолжайте указание точек, щелкая в области чертежа или вво дя их координаты, для получения дальнейших сегментов.
4. Нажмите Enter для завершения создания линии.
рис. 7

69
Построение полилинии
Двумерная полилиния (рис. 8) представляет собой связанную по следовательность линейных и дуговых сегментов, составляющих единый объект. Плоские полилинии обладают следующими свойствами:
они могут иметь переменную толщину; для построения полилиний можно использовать штрихпунктирные
линии; широкие полилинии можно использовать для построения закрашен
ных кругов и колец; последовательность отрезков и дуг может образовывать замкнутый
многоугольник или эллипс; между сегментами полилинии можно создавать фаски или сопряже
ния; из полилинии можно создавать сплайн путём её сглаживания; можно вычислить площадь и периметр плоской полилинии; двумерные полилинии можно редактировать.
рис. 8
Построение окружности
Команда Круг позволяет строить окружности разными способами: построение по центру и радиусу (диаметру); построение по двум точкам; по строение по трем точкам; по двум точкам касания и радиусу.
Построение многоугольника
Команда Многоугольник создаёт правильные многоугольники с по мощью замкнутых полилиний с числом сторон от 3 до 1024. При этом может быть вписанным или описанный относительно воображаемой окружности ра диусом R (рис.9).
рис. 9

70
1. РисованиеМногоугольник 2. Ввести количество сторон многоугольника. 3. Указать щелчком положение центра многоугольника или ввести
его координаты. 4. Выбрать вариант построения: вписанный или описанный. 5. Ввести радиус воображаемой окружности. После ввода радиуса
многоугольник появится на экране. Существует способ возможности построения многоугольника по раз
меру одной из его сторон
Построение кольца При построении кольца создаются два одинаковых сегмента полилинии
с шириной, которая определяется как половина разности между наружным и внутренним диаметром кольца.
Закрашиванием кольца управляет системная переменная FILLMODE, которой присваивается значение 0, если кольцо не закрашивается, и значение 1 для закрашивания кольца (рис. 10).
Кольца, не имеющие закраски внутри своей области всё равно имеют вспомогательные отрезки.
рис. 10
Построение мультилинии Мультилиния состоит из пучка от 2 до 16 параллельных линий, назы
ваемых элемент ами мульт илинии (рис. 11). Каждый элемент мультилинии смещён относительно её оси на заданное расстояние. По умолчанию строится мультилиния, состоящая из двух элементов. Количество и параметры муль тилинии определяются ст илями мульт илинии.
1. Формат Ст или мульт илиний. 2. В появившемся диалоговом окне прописываются нужные параметры. После вызова команды предлагается воспользоваться стилем, который
использовался последним. 1. РисованиеМульт илиния.

71
2. Укажите первую точку мультилинии или воспользуйтесь опциями для изменения стиля и свойств мультилинии.
3. Введите в командной строке опцию (Ст иль). 4. Введите имя стиля или знак вопроса для получения списка доступ
ных стилей. 5. Для задания размещения мультилинии относительно осевой линии
введите опцию (Располож ение) и выберите один из возможных вариантов (Верх, цент р или Низ).
6. Для изменения масштаба воспользуйтесь опцией (Масшт аб). 7. После настройки опций команды укажите начальную и последующие
точки мультилинии, а для замыкания её воспользуйтесь опцией (Замкнут ь).
рис. 11
Построение сплайнов
Сплайны применяются при рисовании кривых произвольной фор мы. Они строятся заданием координат определяющих точек. Сплайны могут быть замкнут ыми и разомкнут ыми и строятся заданием определяющих то чек.
1. РисованиеСплайн. 2. Укажите начальную и последующие точки сплайна, а для завершения
ввода точек нажмите клавишу Enter. В первой точке сплайна появится «нит ь» для задания направления начала сплайна.
3. Выберите направление касательной к сплайну, поворачивая «нит ь», а для подтверждения выбранного направления щёлкните левой кнопкой мы ши, «нит ь» появится в последней точке сплайна.
4. Таким же способом выберите направление касательной в этой точке сплайна. Сплайн построен.
Построение эллипсов и эллиптических дуг Построение эллипсов выполняется заданием двух осей. Можно задать
одну из осей и эксцентриситет или ввести его центр, конечную точку одной из его осей и длину другой. В изометрическом режиме черчения с помощью команды построения эллипса можно создавать изометрические круги.
1. РисованиеЭллипс(Ось, Конец (конт екст ное меню)). 2. Введите в командной строке координаты или укажите мышью на эк
ране точку начала одной из осей эллипса. Появится запрос на ввод второй конечной точки оси эллипса.

72
3. Укажите вторую точку первой оси эллипса. Точка, указанная в ответ на запрос, определяет ориентацию и длину первой оси эллипса.
4. Введите число или покажите расстояние на экране, которые воспри нимаются как половина длины второй оси эллипса. Для визуального контро ля построения эллипса на экране высвечивается «резиновая нит ь», соеди няющая перекрестье курсора с центром первой полуоси.
Команда ЭЛЛИПС: пост роение эллипса по цент ру и двум осям. 1. РисованиеЭллипсЦент р. 2. Укажите центр эллипса, в качестве которого используется точка пе
ресечения осей эллипса. 3. Укажите конечную точку одной из осей эллипса. Угол между осью
эллипса и лучом, проходящим через его центр и указанную точку, определяет угол поворота эллипса.
4. Введите число или покажите расстояние на экране, которые воспри нимаются как половина длины второй оси эллипса.
Команда ЭЛЛИПС: пост роение эллипт ической дуги по начальному и конечному углам.
1. РисованиеЭллипсДуга. 2. введите в командной строке координаты или укажите мышью на эк
ране точку начала одной из осей эллипса. 3. Укажите вторую точку первой оси эллипса. Точка, указанная в ответ
на этот запрос, определяет ориентацию и длину первой оси эллипса.
РЕЖИМЫ РЕДАКТИРОВАНИЯ
Команды редактирования позволяют выполнять различные операции с объектами. Режимы редактирования вызываются с Панели редакт ирования или Меню Редакт ирование (рис. 12).

73
рис. 12
Зеркало. Этот режим позволяет создавать зеркальные копии с сохранением пер
воначальных объектов или с их удалением после создания зеркальной копии. 1. Редакт ирование ЗЕРКАЛО. 2. Выберите отражаемые объекты; <Enter>. 3. Укажите первую точку оси отражения. 4. Укажите вторую точку оси отражения. В командной строке появится запрос: Удалить исходные объекты?
[Да/Нет] <Н>: 5. Нажмите клавишу <Enter>, если копируемые объекты следует сохра
нить. Если копируемые объекты удаляются, то в командной строке введите (Да), или выберите (Да) из контекстного меню; <Enter>.
Копирование 1. Редакт ирование КОПИРОВАТЬ. 2. Выберите нужные объекты; <Enter>.

74
3. Введите (Несколько) если копий будет несколько; <Enter>. (Доста точно ввести (Н), т.к. в командной строке они написаны прописными буквами или выбрать из контекстного меню).
4. Укажите базовую точку, относительно которой будет происходить копирование
5. Включите режим рисования горизонтальных и вертикальных линий, щёлкнув мышью по кнопке ОРТО.
6. Переместите курсор в нужном направлении и введите расстоянии до копии; <Enter>.
7. Поменяйте направление курсора, если нужно, и введите новое рас стояние; <Enter>.
Сопряжение Этот режим позволяет получить скругленный угол отрезков ломаной
линии заданным радиусом сопрягающей дуги, при этом можно выбрать вари ант скругления с обрезкой или без обрезки выступающих линий отрезков.
1. Редакт ированиеСОПРЯЖЕНИЕ. 2. Введите опцию радиуса (раДиус) (или выберите из контекстного ме
ню) для ввода радиуса сопряжения. <Enter> 3. Введите значение радиуса сопряжения. <Enter> 4. Выберите сопрягаемые объекты.
Масштаб Изменение размера (увеличение или уменьшения) объектов пропор
ционально коэффициенту масштабирования. Коэффициент увеличения всегда больше единицы, а коэффициент уменьшения меньше единицы. Масштаби рование происходит относительно точки масштабирования, которая указыва ется щелчком мыши в нужном месте чертежа или вводятся её координаты.
1. Редакт ированиеМАСШТАБ. 2. Выберите объекты, размер которых нужно поменять; <Enter> 3. Укажите точку масштабирования. 4. Введите коэффициент масштабирования; <Enter> В результате выделенные объекты изменят свой размер в указанное
число раз.
Поворот Поворот объектов на величину угла относительно указанной точки по
ворота. 1. Редакт ированиеПОВОРОТ. 2. Выберите объекты, которые нужно повернуть; <Enter> 3. Укажите точку поворота или введите её координаты. 4. Введите величину угла; <Enter>

75
В результате выделенные объекты будут повернуты в соответствии с отрицательной или положительной величиной угла.
Массив Редакт ированиеМАССИВ. Позволяет распределить копии по окружности (круговой массив) или по
прямоугольной сетке (прямоугольный массив). Прямоугольный массив используют для получения копий состоящих из
рядов и столбиков. Смещение между рядами и столбиками задается в соот ветствующие поля (меж ду рядами; меж ду ст олбцами), при этом копии мо гут быть повернуты на величину угла поворота (рис. 13). Прямоугольный массив обычно создается сверху вниз и слева направо. Можно поменять это направление, вводя в поля смещения отрицательные величины.
рис. 13
Круговой массив распределяет заданное количество копий вдоль ок ружности относительно центра массива, при это можно сохранять фиксиро ванную ориентацию, подобно цифрам на циферблате часов ( флажок Повора чиват ь элемент ы массива Выкл.) Способы построения кругового массива выбираются из выпадающего списка Способ пост роения (рис. 14).

76
рис. 14
Редактировать объекты можно как в рабочей области. так и с помощью палитры Свойст ва.
Свойства объектов К свойствам объекта относятся геометрические характеристики, на
пример радиус окружности или координаты конечных точек отрезка. Кроме того, к многочисленным свой ствам объектов относится цвет и тип линии, принадлежность слою. Вся информация о свойствах объекта представлена в палитре СВОЙСТВА(рис. 15).
рис. 15

77
Любые свойства объектов можно изменить в диалоговом окне СВОЙ СТВА. Для этого нужные объекты выделяются, и вызывается диалоговое окно Характ ерист ики (Свойст ва) из контекстного меню или с панели СТАН ДАРТНА (под главным меню).
В появившемся диалоговом окне отражаются все свойства выделенного объекта доступные для изменения. Информация, которую содержит эта па литра зависит от выделенного объекта. Набор свойств может менятся соглас но вида выделенных объектов. Для изменения параметров нужно установить курсор на нужной строке и внести новые данные.
В том случае если объектов несколько по набор предлагаемых свойств общий для всех выделенных объектов.
Лекция 11
Линейная перспектива
План лекции. 1. Виды перспективы. 2. Аппарат линейной перспективы. 3. Перспективное изображение точек. 4. Перспективное изображение прямых линий. 1.Неотъемлемым элементом творческого процесса проектирования яв
ляется построение такого изображения, восприятие которого возможно бли же подходило бы к восприятию запроектированного объекта в натуре, чтобы уже в ходе создания проекта можно было проверить задуманную компози цию в отношении масштабности объёмов, пропорций, членений и прочее. Та ким изображением является перспектива, построение которой базируется на методе центрального проецирования, аналогичной геометрической основе нашего зрительного восприятия.
Поверхность, на которой строится перспективное изображение, называ ется карт иной. В зависимости от геометрического характера картины: плос кость, цилиндрическая или сферическая поверхность – перспектива бывает соответственно линейной, панорамной или купольной. В архитектурно проектной работе используется линейная перспектива.
2.Аппарат линейной перспективы Познакомимся с названием и обозначением элементов, входящих в ап
парат линейной перспективы. Будем рассматривать линейную перспективу на вертикальной картине (рис. 1).
Оставим плоскость π1 за эпюром Монжа. Поэтому картину обозначим π3.

78
S3
π 3
W 2
x23
ν
P
D2 D
D1
h
π 2
γ
рис. 1
Итак, в аппарат линейной перспективы входят: 1. π3 – картина; 2. π2 –предметная плоскость, причём π3⊥π2. 3. S3 – точка зрения. 4. W2 – точка стояния. 5. π3∩π2=х23 – основание картины. 6. Луч, проходящий через точку зрения перпендикулярно картине, на
зывается главным лучом: S3P – главный луч. 7. Точка пересечения главного луча с картиной называется главной
точкой картины: Р – главная т очка карт ины. 8. Плоскость, проходящая через точку зрения параллельно π2, называ
ется плоскостью горизонта: γ – плоскост ь горизонт а. 9. Линия пересечения плоскости горизонта с картиной называется ли
нией горизонта: h – линия горизонт а. 10. Расстояние от точки зрения до картины называется дистанционным
расстоянием: S3P=D –дист анционное расст ояние. 11. Точки, расположенные на линии горизонта на дистанционном рас
стоянии от главной точки Р, по разные стороны от неё, называются дистан ционными точками: PD1=PD2=D, D1 и D2 –дист анционные т очки.
12.Плоскость, проходящая через точку зрения параллельно картине, на зывается нейтральной плоскостью: ν нейт ральная плоскост ь.
3. Перспективное изображение точек. Перспектива является частным случаем метода двух изображений, ко
гда плоскости проекций взаимно перпендикулярны, проецирование на одну из них ортогональное, на другую – центральное.

79
На рис. 2 π3⊥π2, центр S2 бесконечно удалён в направлении, перпенди кулярном π2, S3 находится на конечном расстоянии. Исключённые точки обозначим W2 и W3: W2=S2S3∩π2; W3=S2S3∩π3.
S3
W 2 x23
π 2
A 3
π3
S2
A2
A
h
W 3
A 2 3
рис. 2
Возьмём произвольную точку А пространства и спроецируем её на обе плоскости. Получим проекции А2 и А3, представляющие собой пространст венную модель точки А. Для перехода к плоской модели перепроецируем А2 из центра S3 на плоскость π3. Получим проекцию А23. Пара проекций (А3, А23) даёт однозначную модель произвольной точки А пространства в пер спективе.
Моделью т очки в перспект иве являет ся пара т очек, располож енных на одной линии связи, проходящей через исключённую т очкуW3 (рис. 3).
K3
x23
A 3
h
W 3
A 2 3
E3
С3
E23
B23 B3
С23
K 2 3
рис. 3
Полученная модель по своим позиционным свойствам ничем не отли чается от эпюра Монжа. В перспективе проекции имеют своё особое назва ние: А3 – первичная проекция или перспектива, А23 – вт оричная проекция точки А. Первичные проекции могут быть расположены как над, так и под линией горизонта. Вторичные проекции – не выше линии горизонта.
Рассмотрим перспективу различных точек частного положения (рис. 4).

80
Если точка В принадлежит предметной плоскости, то В2≡В и, следова тельно, В3≡В23 (π2 – тождественная плоскость). У точки С, принадлежащей картине, вторичная проекция находится на основании картины: С23∈х23.
Особого внимания заслуживает перспектива бесконечно удалённых то чек. Пусть точка Е бесконечно удалена (рис. 4). Проведя луч [S3E) парал лельно заданному направлению и отметив точку пересечения его с картиной, получим первичную проекцию Е3 точки Е. Проекция Е2 будет бесконечно удалена в направлении луча [W2E2), соответственного лучу [W3E3). Чтобы получить вторичную проекцию Е23 точки Е, проводим луч [S3E2) парал лельно [W2Е2). Луч [S3E2) будет находиться в плоскости горизонта. Следо вательно, он пересечёт картину в точке Е23, лежащую на линии горизонта. Таким образом, обе проекции бесконечно удалённой точки в перспективе на ходятся на конечном расстоянии, причём, вт оричная проекция обязат ельно долж на принадлеж ат ь линии горизонт а.
Но в пространстве есть и такие точки, обе проекции которых в перспек тиве бесконечно удалены. Это точки, лежащие в нейтральной плоскости. Так на рис.4 точка K∈ν. Проецирующие лучи S3K и S3K2 будут параллельны кар тине π3, следовательно, они пересекут её в бесконечно удалённых точках. Та кие точки удобно использовать при задании источника освещения в перспек тиве.
S3
π 2
W 2 K 2
x23
E23
K23
K3
E3
E ∞
E 2
K
C2 C23
B B2
B3 B23
ν
C ≡ C 3 W 3
h
рис. 4

81
Плоские модели всех точек, рассмотренных выше, представлены на рис.3.
4.Перспективное изображение прямых линий Моделью прямой линии в перспект иве, так же как и на эпюре Монжа, в
общем случае являет ся пара прямых, в част ном случае – прямая и т очка. Но в перспективе прямая линия характеризуется двумя особыми точка
ми: картинным следом и точкой схода. Карт инным следом прямой линии называется точка пересечения её с
картиной. На рис. 5 n∩π3=N – картинный след прямой n. Изображение F3 в перспективе бесконечно удалённой точки F∞ прямой
n называется её т очкой схода. Получается она при пересечении с картиной луча, проведённого через точку зрения S3 параллельно данной прямой n (рис. 5).
Все параллельные между собой прямые в перспективе имеют общую точку схода. Так на рис.5 mnl. Их первичные проекции m3, n3, l3 проходят через общую точку схода F3.
Рассмотрим модели различных прямых линий в перспективе. 1.Прямая линия n общего полож ения.
Обе её проекции n3 и n23 проходят под про извольным углом к линии горизонта h (рис. 6).
Вторичная проекция точки схода пря мой находится на пересечении вторичной проекции этой прямой с линией горизонта: Е23=n23∩h. Затем по линии связи определя ем её первичную проекцию Е3.
2.В пространстве прямая а параллельна карт ине. На модели вторичная проекция а23 параллельна линии горизонта: а23h (рис. 7).
Вследствие этого точка схода прямой а бесконечно удалена. Параллельность таких прямых в перспективе сохраняется.
3. Прямая АВ перпендикулярна предмет ной плоскост и. Это будет вер тикальная прямая (рис. 8). Но она одновременно параллельна картине. Сле довательно, параллельность вертикальных прямых в перспективе сохраняет ся.
n23
E23
E3 x23
n3
h
рис. 6

82
x23
E3
E23 a 2 3
h h
E3
E23
A3
A23 B23 B3
a 3
x23 рис. 7 рис. 8
4.Горизонт альная прямая линия, т.е. прямая, параллельная предметной плоскости.
На модели первичная и вторичная проекции этой прямой пересекаются на линии горизонта. Это значит, что обе проекции точки схода прямой совпа дают. Местоположение точек схода на линии горизонта зависит от того, под каким углом проходит горизонтальная прямая к картине π3.
Если прямые d и f проходят под углом 45° к картине, то их точки схода совпадают с дист анционными т очками D1 и D2. На рис 9, а показано поло жение этих прямых в пространстве, на рис. 9, б – в перспективе.
Точка схода прямых, перпендикулярных карт ине, совпадает с главной т очкой Р картины (рис. 10).
x23
D1 P D2
d3 f3
d23 f23
d f
D2 D1
D
S3
P
a б
рис. 9

83
D1 P D2 h E3 E23 D2 D1 P
b23
b3
h
x23 x23
c 3
c 2 3
E3 E23
рис. 10 рис. 11
Во всех остальных случаях точки схода горизонтальных прямых линий могут находиться в любом месте на линии горизонта, но они не будут совпа дать с точками Р, D1 и D2. Прямая линия b, изображённая на рис. 11, парал лельна π2 и проходит к π3 под произвольным углом не равным 45° и 90°.
Лекция 12
Тени в перспективе. План лекции
1. Задание источника освещения в перспективе. 2. Построение теней в перспективе.
1. Задание источника освещения в перспективе. При построении теней в перспективе принимается обычно одно из
следующих двух главных условий освещения. Лучи света исходят из одной светящейся точки, то есть являются цен
тральными. Лучи света параллельны друг другу и определяются данным направ
лением. Первый случай соответствует освещению лампой, свечой или фона
рём, а второй – солнечному или лунному освещению. Освещение из точеч ного источника называется факельным. На рис. 1, а показано задание его в перспективе. Если освещение параллельное, то в перспективе оно задаётся двумя проекциями, расположенными на конечном расстоянии. Причём, вто ричная проекция L23 находится на линии горизонта, а первичная либо над h (источник расположен перед зрителем), либо под h (источник за зрителем) (рис. 1, б).

84
L 2 3
h h h
б
L 3
L 2 3 L 2 3
L 3 L 3 L 3
L 2 3
а в
рис. 1
В обоих случаях наиболее удобным и чаще всего применяемым явля ется вариант расположения источника в нейтральной плоскости, когда обе его проекции бесконечно удалены (рис. 1, в).
2. Построение падающей тени в перспективе. Построение тени, падающей от какойлибо точки А на плоскость Σ
выполняется следующим образом. Проводим через точку луч LА. Строим проекцию L′A′ луча на плоскость Σ. Точка tА пересечения самого луча с его проекцией и будет искомой тенью (рис. 2, а). В перспективе тень, падающая от точки на предметную плоскость, получается при пересечении первичной и вторичной проекций луча (рис. 2, б).
A′ tA
L 3
h L′
A
L
A 3
tA A 2 3
L 2 3
а б
рис. 2
Закономерности построения теней в ортогональных проекциях сохра няются и в перспективе.
Пример 1. Построить тень от шеста при факельном освещении (рис.3). Поскольку шест вертикальный, то тень от него совпала с направлением вто ричной проекции луча.

85
Пример 2. Построить тень от отрезка при параллельном освещении (источник находится перед зрителем) (рис. 4).
L 3
h
A 3
tA
A 2 3 L 2 3 tA
tВ
B 2 3
A 2 3
A 3 B 3 L 2 3
L 3
h
рис. 4
Строим тени tA и tB от каждого конца отрезка и соединяем получен ные точки.
Пример 3. Построить тень от пластины при параллельном освещении (источник сзади зрителя) (рис. 5).
рис. 5
В перспективе изображён параллелограмм ABCD. Так как ребро ВС парал лельно земле, то тень от него пойдёт в ту же точку схода, что и ребро. Тени от параллельных рёбер АВ и СD параллельны между собой, следовательно, должны иметь общую точку на линии горизонта.
Пример 4. Построить тени параллелепипеда при параллельном осве щении (рис. 6).

86
5 1
4 3 2
t3 t2
t1
t4
F3 L23 h V 3
L3 рис. 6
Проведя из вторичной проекции L23 лучи, касающиеся основания параллеле пипеда, определяем контур собственной тени. Им является пространственная ломаная линия 12345. От неё строим падающую тень, соблюдая законо мерности построения теней.
Пример 5. Построить тени объекта в перспективе. Источник освеще ния находится в нейтральной плоскости (рис. 7).
L23
L3
13
A3
tA tk t1
t2 t3
A23
323
33
23
K
рис. 7
Объект состоит из двух параллелепипедов. Строим тень от нижней фигуры, затем от верхней фигуры. Тень от вертикального ребра, проходя щего через точку 13, сначала пойдёт по верхнему основанию нижнего па раллелепипеда. В точке исчезновения К она соскользнёт на землю. Из точки К проводим первичный луч до пересечения с тенью от того ребра, на кото ром находится точка К. Далее тень продолжится по вторичному лучу. Рёбра

87
12 и 23 параллельны земле, поэтому тени t1t2 и t2t3 будут направлены в соответствующие точки схода. Из t3 тень от вертикального ребра пойдёт по вторичному лучу. Следует иметь в виду, что т ень от наклонного ребра не будет совпадат ь с направлением луча.
Если точка схода отсутствует, то для построения тени, падающей от верхнего параллелепипеда на землю, надо иметь вторичные проекции точек, дающих тень. Для этого точку можно заключить в какуюлибо вертикаль ную грань и найти след этой грани на всех плоскостях. На рис. 7 показано построение вторичной проекции точки 3.
Пример 6. Построить собственные и падающие тени сооружения. Ис точник освещения находится в нейтральной плоскости (рис. 8).
tk
A
B C
E
K
tB tс
V 3 F3 h
L3 L 2 3
D
рис. 8
Если ребро пересекает плоскость, то тень от него на эту плоскость проходит через точку их пересечения (след прямой). На рис. 8 тень от ребра ВС падает на вертикальную стену, наклонный скат и землю. Чтобы полу чить направление тени на вертикальную стену, определим точку D пересе чения проходящей через неё плоскости с ребром ВС. Тень пойдёт по прямой DtВ. В точке пересечения её с верхним ребром вертикальной стены тень преломится на наклонный скат. Мысленно продлим плоскость ската, и от метим точку Е пересечения с ней прямой ВС. По скату тень пойдёт в точку Е. В точке исчезновения К тень соскользнёт на землю. Так как ребро ВС па раллельно земле, то тень от него по земле пойдёт в точку схода V3. Осталь ные тени получены путём использования вторичных проекций и закономер ностей построения теней.

88
Пример 7. Построить тени колонны. Источник освещения находится в нейтральной плоскости (рис. 9).
A 3
B 3
C 3
D 3
M 3 2
2′ A 2 3
B 2 3 ≡ C 2 3 tB tс
tD
tE
tA
E 3
K V 3
F 3 L 3
1′
1
рис. 9
Контуром собственной тени плиты, отбрасывающей тень на колонну и зем лю, является пространственная замкнутая ломаная линия ABCDELA. Для на хождения вторичных проекций вершин этой ломаной используем точки 1 и 2 пересечения рёбер BM и AL с плоскостью передней грани колонны. На про должении основания колонны определяем вторичные проекции 1′ и 2′, и из точки схода V3 проводим через них прямые, на которых будут находиться вторичные проекции рёбер AL и BM. По линиям связи на них находим А23, В23 и вторичные проекции других точек, если они понадобятся для построе ния тени.
На переднюю грань колонны тень падает от рёбер AL и АВ плиты. Тень от ребра AL должна выходить из точки 2, а от ребра АВ – направлена в точку схода F3. В точке исчезновения K тень от ребра АВ соскользнёт с ко лонны на землю.
Пример 8. Построить тень от козырька (рис. 10). Тень падает от пространственной ломаной АВСDE. Вторичная проек
ция В23 точки В определена через след на земле вертикальной грани, прохо дящей через ребро АВ.

89
L 3
L 2 3
V 3 F 3 h 3 B 3 A 3
Д 3 C 3 E 3
tB
B 2 3
tД
tС
рис. 10
Пример 9. Построить тени в нишах (рис. 11).
F 3 h 3
B 3 C 3
A 3
tC tB
tA
рис. 11
В нижней нише тень точки А построена через её первичную и вторич ную проекции. В верхней нише её низ не виден. В таком случае можно ис пользовать верхнюю горизонтальную грань. Первичная и вторичная проек ции точки В будут совмещены. И из неё выходят оба луча. При отсутствии точки схода на ребре берём произвольную точку С и тем же способом нахо дим её тень. При точном построении тень tBtC должна пройти через точку схода ребра ВС.

90
Пример 10. Определить контур собственной тени объекта и построить тень падающую (рис. 12).
4 5
h
1 t 2
2
6 7
t 3 t 4 t 5 5′
рис. 12
Для определения освещённости ската необходимо построить тень от его конька и свеса. Если тень от конька перекроется тенью свеса, то скат осве щён. В противном случае скат не освещён. Так на рис.12 скат 3457 не ос вещён, так как тень t4t5 от конька 45 перекрыла тень нижнего ребра 37 на клонного ската.
Лекция 13 Аксонометрия
План лекции. 1. Аксонометрия точки 2. Задание метрики в аксонометрии 3. Теорема Польке 4. Показатели искажения 5. Виды аксонометрии
Аксонометрия – это наглядное изображение объекта, полученное пу тём параллельноортогонального проецирования на плоскости проекций.
1. Аксонометрия точки. Аксонометрия – это частный случай метода двух изображений, когда
плоскости π1 и π2 расположены под произвольным углом друг к другу, ко торый может оказаться прямым. Проецирование на плоскость π1 параллель ное (в частном случае может быть ортогональным), на π2 – обязательно ор тогональное (рис. 1). Так как оба центра S1 и S2 бесконечно удалены, то и исключённые точки U1 и U2 также окажутся бесконечно удалёнными.
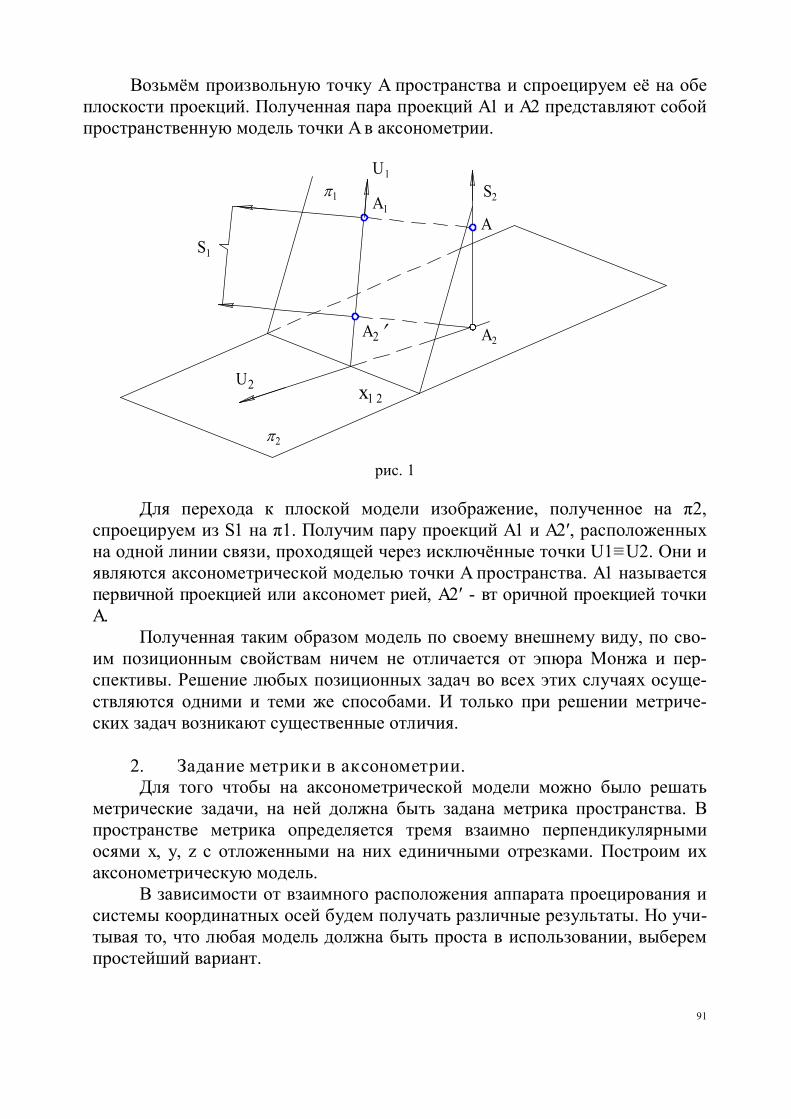
91
Возьмём произвольную точку А пространства и спроецируем её на обе плоскости проекций. Полученная пара проекций А1 и А2 представляют собой пространственную модель точки Ав аксонометрии.
U 2 x 1 2
π 2
A 2 ′
A 1
U 1
π 1
A
A 2
S 1
S 2
рис. 1
Для перехода к плоской модели изображение, полученное на π2, спроецируем из S1 на π1. Получим пару проекций А1 и А2′, расположенных на одной линии связи, проходящей через исключённые точки U1≡U2. Они и являются аксонометрической моделью точки А пространства. А1 называется первичной проекцией или аксономет рией, А2′ вт оричной проекцией точки А.
Полученная таким образом модель по своему внешнему виду, по сво им позиционным свойствам ничем не отличается от эпюра Монжа и пер спективы. Решение любых позиционных задач во всех этих случаях осуще ствляются одними и теми же способами. И только при решении метриче ских задач возникают существенные отличия.
2. Задание метрики в аксонометрии. Для того чтобы на аксонометрической модели можно было решать
метрические задачи, на ней должна быть задана метрика пространства. В пространстве метрика определяется тремя взаимно перпендикулярными осями х, у, z с отложенными на них единичными отрезками. Построим их аксонометрическую модель.
В зависимости от взаимного расположения аппарата проецирования и системы координатных осей будем получать различные результаты. Но учи тывая то, что любая модель должна быть проста в использовании, выберем простейший вариант.

92
Пусть оси х, у расположены в плоскости π2, а ось z, следовательно, ей перпендикулярна. На осях х, у и z отложим от начала координат один и тот же натуральный единичный отрезок ОЕ. Построим модель выбранной коор динатной системы (рис. 2).
z
O
τ 1
O 1
x 1 ≡ x 2 ′ x≡ x 2
Ey
S 1
y 1 ≡ y 2 ′ y≡ y 2 ′ E
E
E
z 1
π 1
π 2
K 1
Ex
Ez
L 1
рис. 2
Отметим точки пересечения координатных осей х, у, z с принятой за картину плоскостью π1: K1=x∩π1, I1=y∩π1, L1=z∩π1. Треугольник K1I1L1 называется т реугольником следов. Спроецируем на π1 начало координат О. Соединив О1 с K1, I1, L1, получим первичные проекции х1, у1,z1 коорди натных осей.
Так как х, у ∈π2, то х2≡х, у2≡у, z2≡О2. По этой причине на картине вторичные проекции координатных осей совпадут с их первичными проек циями: х2′≡х1, у2′≡у1, z2′≡z1. Проекциями единичных отрезков ОЕ являют ся отрезки О1Ех, О1Еу, О1Еz. Полученная модель выглядит так, как показа но на рис. 3, а. Для упрощения совпавшие проекции осей в дальнейшем бу дем обозначать х′, у′, z′ и модель примет вид, представленный на рис. 3, б.
Проекции х′, у′, z′ принято именовать аксономет рическими осями, а отрезки О′Ех, О′Еу, О′Еz – аксономет рическими единицами.

93
z′
A′
х′
y′
z′
x 1 ≡ x 2 ′
y 1 ≡ y 2 ′
O 1 ≡ O 2 ′ O′
2
A
Ex
E 2 1
Ey
1 Ex Ey
Ez
а б
рис. 3
Полученная модель координатной системы х, у, z позволяет легко ре шать метрические задачи, связанные с определением координат указанной точки или с построением точки по указанным координатам. На рис.3б пока зана модель точки А, имеющей координаты (1, 2, 3). Сначала по координа там х и у построена вторичная проекция А′. Затем при помощи координаты z определена её первичная проекция А.
3. Теорема Польке Оси х, у можно перемещать в плоскости π2, вращая их вокруг точки О.
Можно переместить и точку О. При этом будут изменяться форма и размеры главного треугольника следов, положение аксонометрических осей х′, у′, z′ и размеры аксонометрических единиц. Если положение координатных осей х, у, z фиксировано, то можно ещё изменить расположение аксонометрических осей х′, у′, z′ и размеры аксонометрических единиц, приняв другое направле ние проецирование на π1, т.е. переместив в пространстве центр S1.
Возникает вопрос: можно ли произвольно выбрать на картине аксоно метрические оси х′, у′, z′ и аксонометрические единицы О′Ех, О′Еу, О′Еz? Ответ на него даёт теорема Польке.
Любые т ри непараллельных от резка на плоскост и мож но рассмат риват ь как параллельную проекцию т рёх равных и взаимно перпендикуляр ных от резков в прост ранст ве. (Речь идёт о единичных отрезках).
Согласно теореме Польке можно через любую намеченную точку О′ провести на картине не совпадающие друг с другом аксонометрические оси х′, у′, z′ и задать на них произвольные масштабные единицы. Но не следует думать, что длина натурального масштабного отрезка ОЕ остаётся произ вольной. Фиксируя отрезки О′Ех, О′Еу, О′Еz, мы фиксируем и натуральный масштаб.

94
4. Показатели искажения Отношение длин аксонометрической и натуральной масштабных еди
ниц называется показат елем (или коэффициентом ) искаж ения по соответ ствующей оси. Имеем три показателя искажения:
p = О′Ех:ОЕ q=O′Ey:OE r = O′Ez:OE Они связаны между собой и зависят от угла γ наклона проецирующих
лучей к плоскости картины. Эта зависимость выражается формулой p2 + q2 + r2 = 2 + ctgγ.
Если проецирование на π1 ортогональное и, следовательно, γ=90°, то сtg90°=0, и формула примет вид p2 + q2 + r2 = 2.
5. Виды аксонометрии В зависимости от направления проецирования на плоскость π1 разли
чают прямоугольную и косоугольную аксонометрию. Если проецирующие лучи не перпендикулярны картине, то получаем косоугольную аксономет рию. При ортогональном проецировании имеем прямоугольную аксономет рию. Каждая из этих аксонометрий может быть ещё трёх видов в зависимо сти от соотношений показателей искажения.
Если p = q= r, то по всем трём осям имеем единое измерение. Такая аксонометрия называется изомет рией (от греческого “изо” – один, единый).
Если p = q≠ r или p = r≠ q, или p ≠ r= q, то имеем два разных измере ния, и аксонометрия называется димет рией (от греческого “ди” –два).
Если p ≠ q≠ r, то измерений три, и аксонометрия называется т римет рией.
Таким образом, бывает прямоугольная и косоугольная изометрия, ди метрия, триметрия.
Для выполнения чертежей в строительстве и машиностроении ГОСТ 2.317 – 69 рекомендует пять видов аксонометрических проекций, перечис ленных в таблице на стр.94.
Аксонометрические изображения необходимо строить в соответствии с показателями искажения. Но поскольку это величины дробные, то для уп рощения построения их округляют: наибольший до единицы, другие уве личивают пропорционально. Такие коэффициенты называются приведённы ми. В таблице указаны натуральные и приведённые показатели (коэффици енты) искажения.

95
Таблица
Стандартные аксонометрии
Название аксоно метрии Расположение осей Натуральные коэффициенты
искажения
Приведенные коэф фициенты искаже
ния Аксонометрия окружности
П р я м о у г о л ь н ы е а к с о н о м е т р и и Прямоугольная изометрия
120Е
120Е
z′
у′ х′
О′ 30Е
p2+q2+r2=2 p=q=r 3p2=2
p=q=r≈0,82
p=q=r=1 Увеличение в 1:0,82=1,22
z′
у′ х′
О′
1,22D 0,71D
1,22D
1,22D
0,71D
0,71D
Прямоугольная ди метрия
z′
х′
О′
у′
41Е 25'
7Е
10'
p=r=0,94 q=0,547
p=r=1 q=0,5
Увеличение в 1:0,94=1,06
z′
х′ О ′
у′
1,06D 0,95D
0,33D
1,06D
1,06D
0,33D

96
Название аксоно метрии Расположение осей Натуральные коэффициенты
искажения
Приведенные коэф фициенты искаже
ния Аксонометрия окружности
К о с о у г о л ь н ы е а к с о н о м е т р и и
Фронтальная изо метрия (кавальер ная аксонометрия) z′
у′
х′ О′ 45Е
90Е
p=q=r=1
z′
у′
х′ О′ 22Е 30'
22Е 30'
1,3D
1,3D
0,54D
0,54D
D
Горизонтальная изометрия (военная аксонометрия)
30Е
z′
у′ х′
О′
90Е
90Е
z′ 30Е
у′
х′ О′
90Е
p=q=r=1 z′
у′ х′
О ′
15Е
30Е
D
1,22D 0,71D
1,37D
0,37D

97
Название аксоно метрии Расположение осей Натуральные коэффициенты
искажения
Приведенные коэф фициенты искаже
ния Аксонометрия окружности
Фронтальная ди метрия (кабинетная аксонометрия)
z′
у′
х′ О′ 45Е
90Е
z′
у′
х′ О′
90Е
90Е
30Е
p=r=1 q=0,5
p=r=1 q=0,75
z′
у′
х′ 7Е 14'
1,07D
0,33D
0,33D
7Е 14'
1,07D
D

98
Лекция 14
Приёмы построения аксонометрии
План лекции
1. Построение аксонометрических осей 2. Треугольник пропорциональности 3. Аксонометрия окружности 4. Аксонометрия плоской фигуры
1. Построение аксонометрических осей.
Каждая аксонометрическая проекция характеризуется своим располо жением осей. Рассмотрим приёмы построения осей прямоугольных аксоно метрий.
В прямоугольной изометрии аксонометрические оси проходят под уг лом 120° друг к другу рис. 1, а. Ось z′ расположена вертикально. Берём две взаимно перпендикулярные прямые. Из точки О′ их пересечения, как из цен тра, проводим дугу окружности произвольного радиуса. Из нижней точки ок ружности этим же радиусом делаем на ней засечки. Через О′ и засечки прово дим х′ и у′.
В прямоугольной диметрии ось z′ располагается вертикально, ось х′ под углом 7°10′, у′ под углом 41°25′ к горизонтали рис. 1, б.
z'
O ' 8 8 1
x'
y'
y' x'
z'
30 O
120 O
30 O
7 O 10'
41 O 25
' а б
рис. 1
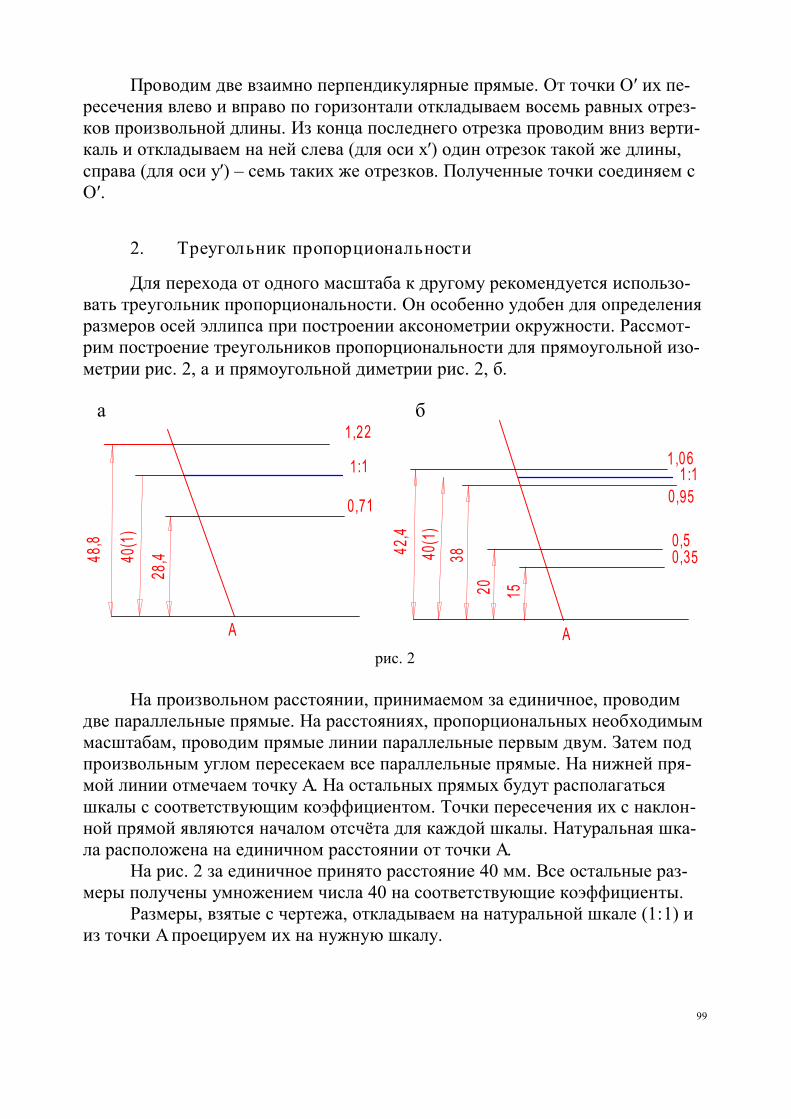
99
Проводим две взаимно перпендикулярные прямые. От точки О′ их пе ресечения влево и вправо по горизонтали откладываем восемь равных отрез ков произвольной длины. Из конца последнего отрезка проводим вниз верти каль и откладываем на ней слева (для оси х′) один отрезок такой же длины, справа (для оси у′) – семь таких же отрезков. Полученные точки соединяем с О′.
2. Треугольник пропорциональности
Для перехода от одного масштаба к другому рекомендуется использо вать треугольник пропорциональности. Он особенно удобен для определения размеров осей эллипса при построении аксонометрии окружности. Рассмот рим построение треугольников пропорциональности для прямоугольной изо метрии рис. 2, а и прямоугольной диметрии рис. 2, б.
а 1,22
1:1
0,71
1,06 1:1
0,95
0,5 0,35 48
,8
40(1)
2 8,4 42
,4 40
(1)
38
20
15
A A
б
рис. 2
На произвольном расстоянии, принимаемом за единичное, проводим две параллельные прямые. На расстояниях, пропорциональных необходимым масштабам, проводим прямые линии параллельные первым двум. Затем под произвольным углом пересекаем все параллельные прямые. На нижней пря мой линии отмечаем точку А. На остальных прямых будут располагаться шкалы с соответствующим коэффициентом. Точки пересечения их с наклон ной прямой являются началом отсчёта для каждой шкалы. Натуральная шка ла расположена на единичном расстоянии от точки А.
На рис. 2 за единичное принято расстояние 40 мм. Все остальные раз меры получены умножением числа 40 на соответствующие коэффициенты.
Размеры, взятые с чертежа, откладываем на натуральной шкале (1:1) и из точки Апроецируем их на нужную шкалу.

100
3. Аксонометрия окружности
Окружность в аксонометрии изображается в виде эллипса, имеющего две взаимно перпендикулярные оси и два сопряжён ных диаметра рис. 3. АВ – большая ось эллипса, CD – малая ось эллипса (CD⊥AB), EF и KL – сопряжённые диаметры. Они являются изображением взаимно перпендикулярных диа метров окружности и направлены вдоль аксоно метрических осей. Ориентация осей эллипса зависит от того, в какой плоскости он находится. В прямоугольной аксоно
метрии малая ось эллипса параллельна аксонометрической оси, не лежащей в плоскости эллипса. Так, если эллипс расположен в плоскости х′О′у′, то малая ось параллельна z′, в плоскости х′О′z′ параллельна у ′, в плоскости у′О′z′ параллельна х′. Расположение осей в косоугольных аксонометриях показано в таблице на стр. …. Остановимся пока только на прямоугольных аксономет риях.
Эллипс может быть построен как лекальная и как циркульная кри вая.
Возьмём окружность произвольного радиуса и построим её прямо угольную изометрию и диметрию разными способами, заготовив предвари тельно треугольники пропорциональности (рис. 2).
1. Лекальная кривая.
Строим аксонометрию в плоскости х′О′у′ по восьми точкам, которыми будут являться концы осей и сопряжённых диаметров.
В прямоугольной изометрии рис. 5, а приведённые коэффициенты искажения по всем осям равны 1. Поэтому на осях х′ и у′ откладываем радиус окружности R, на оси z′ малую ось эллипса 0,71R, на прямой, перпендику лярной z′, большую ось эллипса 1,22R.
В прямоугольной диметрии рис. 5, б по осям х′ и z′ коэффициент ис кажения равен 1, по оси у′ 0,5. Поэтому на оси х′ откладываем радиус R, на оси у′ 0,5R, на оси z′ малую ось 0,35R, на прямой, перпендикулярной z′, большую ось 1,06R.
A
K C F
B
L D
E
рис. 3

101
x' R
1,22 R
R
O'
0,71 R R
y'
1,22 R
R 0,71 R
Z'
X' R
1,06 R
0,5 R 0,35 R
O' R
1,06 R
0,35 R 0,5 R
y'
Z' а б
рис. 5 Полученные восемь точек соединяем при помощи лекала. Для определения
размеров большой и малой осей эллипса откладываем на натуральной шкале треугольников пропорциональности радиус окружности R и из точки Апроецируем его на ос тальные шкалы.
Размеры осей эллипса для прямоугольной изомет рии можно определить и графически (рис. 6). Для этого из концов С и D взаимно перпендикулярных диаметров окружности проводим дуги радиусом CD до взаимного пересечения в точках Аи В. Соединив точки Аи В, полу чим большую ось эллипса, равную 1,22D, а соединив С и
D, получим малую ось, равную 0,71D.
2. Коробовая кривая.
Коробовая кривая является циркульной кривой, состоящей из четырёх дуг окружностей. Ею можно заменить эллипс. Строится она по его осям.
На рис. 7 коробовая кривая построена в плоскости х′О′у′ прямоуголь ной изометрии. Малая ось CD направлена вдоль оси z′, большая АВ ей пер пендикулярна. Построение выполняем в следующей последовательности.
A
C B
D
рис. 6
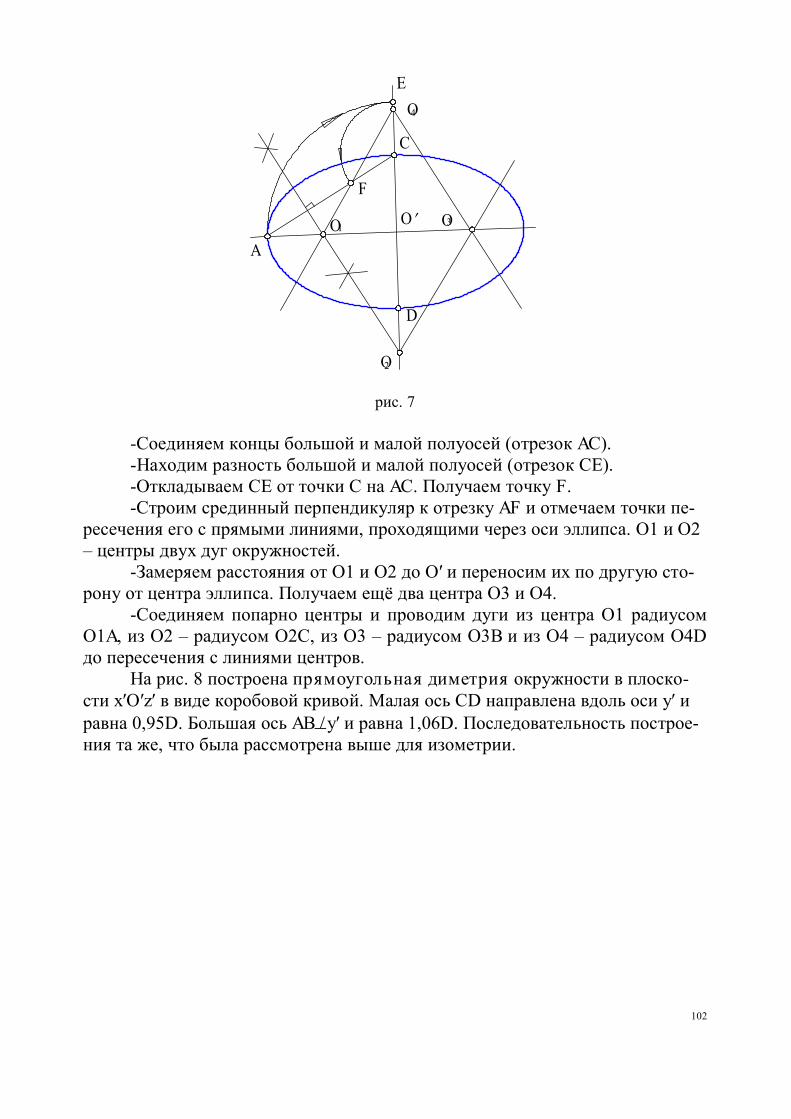
102
O O′ O
O
F
A
C
E
D
O
1 3
4
2
рис. 7
Соединяем концы большой и малой полуосей (отрезок АС). Находим разность большой и малой полуосей (отрезок СЕ). Откладываем СЕ от точки С на АС. Получаем точку F. Строим срединный перпендикуляр к отрезку AF и отмечаем точки пе
ресечения его с прямыми линиями, проходящими через оси эллипса. О1 и О2 – центры двух дуг окружностей.
Замеряем расстояния от О1 и О2 до О′ и переносим их по другую сто рону от центра эллипса. Получаем ещё два центра О3 и О4.
Соединяем попарно центры и проводим дуги из центра О1 радиусом О1А, из О2 – радиусом О2С, из О3 – радиусом О3В и из О4 – радиусом О4D до пересечения с линиями центров.
На рис. 8 построена прямоугольная диметрия окружности в плоско сти х′О′z′ в виде коробовой кривой. Малая ось CD направлена вдоль оси у′ и равна 0,95D. Большая ось АВ⊥у′ и равна 1,06D. Последовательность построе ния та же, что была рассмотрена выше для изометрии.

103
y'
D
A
O O
O O
E C B
1
2
4 3
F
рис. 8
Рассмотренный метод является универсальным и может применяться не только для построения аксонометрии окружности, но и любого эллипса, если известны размеры его большой и малой оси. Этим широко пользуются при конструировании технических деталей.
3. Овал.
Построим прямоугольную изомет рию той же окружности в плоскости х′О′у′, заменяя эллипс овалом рис. 9.
Задаём аксонометрические оси х′, у′, z′ и направление большой оси эллипса. Из центра эллипса проводим окружность, ак сонометрию которой строим. На пересече нии этой окружности с направлением ма лой оси эллипса (осью z′) получаем два центра дуг О1 и О2. Проводим прямые че рез О1 и точки Е, L пересечения окружно сти с осями х′, у′. При пересечении их с на правлением большой оси получаем ещё два центра О3 и О4. Радиусы дуг сопрягающихся окружностей будут равны рас стоянию от центров до концов сопряжённых диаметров EF и KL.
x′ E
O 2 y'
L
О 3
K F
O 1
z'
О 4
рис. 9

104
рис. 10
Построенный овал неточно повторяет форму эллипса. У них имеются небольшие расхождения в размерах. Такой овал используется только в пря моугольной изометрии.
На рис. 10 показано построение овала, заменяющего эллипс в прямо угольной диметрии. Овал строится по осям и пригоден только для эллипсов, у которых малая ось в три раза меньше большой оси (в плоскостях х′О′у′ и z′О′у′). Центры О1 и О2 дуг окружностей удалены от центра О эллипса на расстояние его большой оси АВ. Центры О3 и О4 двух других дуг окружно стей удалены от концов Аи В большой оси эллипса на расстояние 1/4CD. Ра диусы сопрягающихся дуг равны R=AB + 1/2CD, r=1/4CD.
4. Аксонометрия плоской фигуры
Прежде чем приступить к построению аксонометрии плоской фигуры, также как и любого геометрического тела, необходимо на ортогональном чертеже задать оси координат. Построение аксонометрии выполняется в со
A O 3
C
D
O B
R
AB
O 2
r= 14 CD
O 4
O 1

105
ответствии с привязкой фигуры к координатной системе. При этом, следует иметь ввиду, что:
все измерения делаются только по осям или параллельно им; все прямые линии, параллельные между собой или параллельные осям
симметрии на ортогональном чертеже, остаются параллельными и в аксоно метрии рис. 12.
Если многоугольник имеет неправильную форму, то его аксонометрия строится по координатам вершин рис. 11.
рис. 11
Построение аксонометрии симметричной фигуры рис.12 можно упро стить, совместив координатные оси с осями симметрии фигуры.
C D
B
A F
E
y' x' F 2 y
E 2
D 2 O
A 2 2
x
B 2 C 2 z'
рис.12
Фигуру, ограниченную кривой линией, строят по отдельным точкам, взятым на ортогональном чертеже рис. 13.
O Ax Bx
By B 2
Cx x z
Ay A 2
Cy y
C 1
z
Cy'
Ay' By' O Ax'
Bx' B' A'
y'
C'
C x' x'

106
z
O
y
x 1 1
2 1
31
41
E 1
12 2232 4 2 A2
1
2
3
4
E
4
3
2
1′ A
y'
z'
4 2 3 22 2 12
1′ 1
2 1
31
4 1
рис. 13
Проекции взятых точек могут быть определены в аксонометрии про порциональным делением соответствующих отрезков 11 и АЕ, что значи тельно проще и точнее, нежели откладывание отдельных размеров.
Лекция 15 (6)
Программа СПДС – приложение AutoCAD План лекции: 1.ГОСТы СПДС. 2. СПДС GraphiCS – приложение AutoCAD. 3. Средства управления элементами чертежа. 4. Автоматическое документирование. 5. Примеры выполнения чертежей в СПДС GraphiCS.
1.Госты СПДС (Система проектной документации для строительства) ГОСТ 3.113093 Общие требования к формам и бланкам документов ГОСТ 21.00193 СПДС. Общие положения ГОСТ 21.00281 СПДС. Нормоконтроль проектносметной документации ГОСТ 21.10197 СПДС. Основные требования к проектной и рабочей доку ментации ГОСТ 21.11095 СПДС. Правила выполнения спецификации оборудования, изделий и материалов ГОСТ 21.11287 (1988) СПДС. Подъемнотранспортное оборудование. Ус ловные обозначения ГОСТ 21.11388 (СТ СЭВ 607387) СПДС. Обозначения характеристик точ ности

107
ГОСТ 21.11495 СПДС. Правила выполнения эскизных чертежей общих ви дов нетиповых изделий ГОСТ 21.20378 СПДС. Правила учета и хранения подлинников проектной документации ГОСТ 21.20493 СПДС. Условные графические обозначения и изображения элементов, генеральных планов и сооружений транспорта ГОСТ 21.20593 (1995) СПДС. Условные обозначения элементов санитарно технических систем ГОСТ 21.20693 (1995) СПДС. Условные обозначения трубопроводов ГОСТ 21.30296 СПДС. Условные графические обозначения в документации по инженерногеологическим изысканиям ГОСТ 21.40188 СПДС. Технология производства. Основные требования к рабочим чертежам ГОСТ 21.40283 СПДС. Антикоррозийная защита технологических аппара тов, газоходов и трубопроводов. Рабочие чертежи ГОСТ 21.40380 СПДС. Обозначения условные графические в схемах. Обо рудование энергетическое ГОСТ 21.40485 СПДС. Автоматизация технологических процессов. Обозна чения условные приборов и средств автоматизации в схемах ГОСТ 21.40593 (1995) СПДС. Правила выполнения рабочей документации тепловой изоляции оборудования и трубопроводов ГОСТ 21.40688 (1998) СПДС. Проводные средства связи. Обозначения ус ловные графические на схемах и планах ГОСТ 21.40893 СПДС. Правила выполнения рабочей документации автома тизации технологических процессов ГОСТ 21.50193 СПДС. Правила выполнения архитектурностроительных ра бочих чертежей ГОСТ 21.50781 СПДС. Интерьеры. Рабочие чертежи ГОСТ 21.50893 (1995) СПДС. Правила выполнения рабочей документации генеральных планов предприятий, сооружений и жилищногражданских объ ектов ГОСТ 21.51383 СПДС. Антикоррозионная защита конструкций зданий и со оружений. Рабочие чертежи ГОСТ 21.60179 (1983) СПДС. Водопровод и канализация. Рабочие чертежи ГОСТ 21.60279 (с изм. 1 1981) СПДС. Отопление, вентиляция и кондицио нирование воздуха. Рабочие чертежи ГОСТ 21.60380 СПДС. Связь и сигнализация. Рабочие чертежи ГОСТ 21.60482 (1992) СПДС. Водоснабжение и канализация. Наружные се ти. Рабочие чертежи ГОСТ 21.60695 СПДС. Правила выполнения рабочей документации тепло механических решений котельных ГОСТ 21.60782 СПДС. Электрическое освещение территории промышлен ных предприятий. Рабочие чертежи

108
ГОСТ 21.60884 СПДС. Внутреннее электрическое освещение. Рабочие чер тежи ГОСТ 21.60983 СПДС. Газоснабжение. Внутренние устройства ГОСТ 21.61085 (1987) СПДС. Газоснабжение. Наружные газопроводы. Ра бочие чертежи ГОСТ 21.61185 СПДС. Централизованное управление энергоснабжением. Условные графические и буквенные обозначения вида и содержания инфор мации ГОСТ 21.61388 СПДС. Силовое электрооборудование. Рабочие чертежи ГОСТ 21.61488 (с попр. 1988) СПДС. Изображения условные графические электрооборудования и проводок на планах ГОСТ 21.61588 (СТ СЭВ 607187) СПДС. Правила выполнения чертежей гидротехнических сооружений ГОСТ 21.61688 (СТ СЭВ 607287) СПДС. Правила выполнения чертежей гидромелиоративных линейных сооружений ГОСТ Р 21.120797 СПДС. Условные графические обозначения на чертежах автомобильных дорог ГОСТ Р 21.170197 СПДС. Правила выполнения рабочей документации ав томобильных дорог ГОСТ Р 21.170296 СПДС. Правила выполнения рабочей документации же лезнодорожных путей СТ СЭВ 156579 Нормативнотехническая документация в строительстве. Буквенные обозначения ГОСТ Р 21.17032000 СПДС. Правила выполнения рабочей документации проводных средств связи.
2. СПДС GraphiCS – приложение AutoCAD. Компания Consistent Software разработала программу СПДС GraphiCS
это набор интеллектуальных инструментальных средств, предназначенных для оформления строительных рабочих чертежей в среде AutoCAD в строгом соответствии с требованиями российских норм СПДС (система проектной документации для строительства). Новое программное обеспечение не явля ется системой автоматизированного проектирования как таковой это допол нение к AutoCAD и специализированным системам, работающим на базе AutoCAD.
Программа не переопределяет команды и функции AutoCAD, а только добавляет свои собственные. Все объекты, созданные СПДС, представляют собой, либо объекты AutoCAD, либо собственные объекты СПДС. Програм ма базируется на современной объектноориентированной технологии ObjectARX. Это позволяет придать объектам СПДС как все свойства прими тивов AutoCAD, так и собственные уникальные свойства. К ним относится, например, редактирование объекта с помощью окна, которое вызывается двойным щелчком мыши, "интеллектуальное" поведение объектов при редак
109
тировании их ручками и автоматическое удаление лишних фрагментов чер тежа при простановке элементов оформления. Все объекты СПДС могут быть вычерчены в необходимом масштабе по отношению к чертежу, изменение масштаба влияет как на объекты СПДС, так и на настройки AutoCAD (мас штаб типов линий, шаг штриховки и др.).
К свойствам AutoCAD относится возможность редактирования объек тов СПДС стандартными командами редактирования: СОТРИ (ERASE), ПЕ РЕНЕСИ (MOVE), КОПИРУЙ (COPY), ПОВЕРНИ (ROTATE), РАСТЯНИ (STRETCH). Можно копировать свойства объекта и/или свойства AutoCAD для объекта с помощью команды MATCHPROP (Копирование свойств). Эти же свойства доступны для редактирования в окне Properties (Свойства).
Все объекты СПДС параметрические и обладают собственными на стройками, задающими правила их вычерчивания. Кроме этого имеются об щие настройки системы, предусмотрен экспорт/импорт настроек.
Специально для СПДС был разработан шрифт, соответствующий ГОСТ 2.30481, включающий обозначения металлопроката и всевозможные специ фичные для строительного проектирования символы (значок диаметра, зна чок уклона, и т. д.). Чертежи, полученные при помощи СПДС, можно переда вать в другие приложения, не имеющие подключенной СПДС.
В программе заложены некоторые нормативные документы, исполь зуемые при оформлении чертежей. Их можно просмотреть в окне справки при настройке параметров объекта СПДС.
В системе имеется подробная контекстнозависимая справочная систе ма, снабженная иллюстрациями и видео роликами.
В программе учтены требования следующих нормативных документов: ГОСТ 21.10197 "СПДС. Основные требования к проектной и рабочей доку ментации"; ГОСТ 21.50193 "СПДС. Правила выполнения архитектурностроительных чертежей"; ГОСТ 2.30168 "ЕСКД. Форматы"; ГОСТ 2.30268 "ЕСКД. Масштабы"; ГОСТ 2.30368 "ЕСКД. Линии"; ГОСТ 2.30481 "ЕСКД. Шрифты чертежные"; ГОСТ 2.30568 "ЕСКД. Изображениявиды, разрезы, сечения"; ГОСТ 2.30668 "ЕСКД. Обозначения графических материалов и правила их нанесения на чертежах". Функциональные возможности программы позволяют выполнять: ортогональные, полярные и отдельные координационные оси; простановку и выравнивание отметок уровней; разные типы выносок; виды, разрезы, сечения, фрагменты и маркеры; изображения различных обрывов и разрывов; арматурные анкеры и стрелки;

110
граничную штриховку, изображения границ грунта, гидро и теплоизоляции; вычерчивание сварных швов по произвольной траектории, сечение шва; создание и редактирование таблиц произвольной сложности; использовать калькулятор с функций автосуммирования и записной книжки в таблицах; вставку готовых форматов и типовых таблиц в чертеж; экспорт/ импорт табличных форм в MS Excel; вычисление и простановку площадей замкнутых контуров на чертеже; вырезание фрагмента изображения; копирование объектов по вектору, отрезку, кривой и со смещением; текстовый редактор.
3. Средства управления элементами чертежа
Главная панель СПДС имеет вид (рис. 1).
Рис.1 Общий вид изображения элементов в программе СПДС (рис. 2).
Рис. 2

111
Для просмотра и редактирования элементов в СПДС появились всплы вающие подсказки. При активизации в настройках эти подсказки будут пока зываться через определенное время и с заданной прозрачностью (рис. 3).
Рис. 3
4. Автоматическое документирование Табличные формы являются неотъемлемой частью любого комплекта
чертежей, поэтому удобство работы с ними значительно экономит время при создании чертежа.
В СПДС GraphiCS параметры таблиц можно изменять непосредственно на чертеже — например, редактировать ячейки, добавлять или удалять строки и столбцы, менять ширину и высоту столбцов или строк, произвольным обра зом делить, объединять или разъединять ячейки.
Как видно из рис. 4, инструмент работы с таблицами идентичен инст рументу MS Excel.
рис. 4

112
С ячейками таблиц СПДС можно выполнять любые математические операции, а использование функций позволит в автоматическом режиме про ставить (например, по возрастающей) позиции в столбце спецификаций (рис. 5). Новый инструмент экспорта/импорта мгновенно и без потери формата ячеек передает/получает таблицу или отдельные ячейки в MS Excel. Любую созданную таблицу пользователь может сохранить в базу таблиц СПДС и впоследствии использовать уже как стандартную. Для таблиц можно задавать толщины линий.
Новый инструмент Универсальный маркер позволяет создать атрибу тивные данные для примитивов AutoCAD или извлечь такие данные из бло ков AutoCAD для дальнейшей передачи в табличные формы СПДС. Маркер как объект СПДС можно сохранить в библиотеке объектов и использовать многократно.
рис. 5
Создать собственный универсальный маркер довольно просто. Проде монстрируем это на примере специфицирования серийных элементов: пло щадок, лестниц, ограждений (рис. 6).
Отрисовываем геометрию маркера и с помощью кнопки создаем его описание (рис. 7), после чего остается только связать спецификацию с соз данным маркером (рис. 8).

113
Рис. 6
Рис. 7

114
Рис. 8
Вставка нового маркера на чертеже даже с другими атрибутами мгно венно отображается в спецификации (рис. 9).
Рис. 9

115
СПДС GraphiCS имеет автоматическое специфицирование в таблице объектов базы данных. База объектов уже содержит минимальный набор строительных элементов (рис. 10).
При выборе элемента из строительной базы пользователь по табличным параметрам вычерчивает элемент в нужной проекции. Выбранные параметры построенного объекта легко специфицируются (рис. 11).
При включенной кнопке автоматического пересчета все изменения па раметров вычерченного объекта немедленно отображаются в спецификации. К изменениям относятся не только увеличение/уменьшение длины и сечения объекта, но и добавление другого объекта из имеющейся базы (рис. 12).
Предусмотрена также возможность пополнения базы из обыкновенных примитивов и блоков AutoCAD. Правда, такая задача под силу только опыт ному пользователю, поскольку база параметризована с использованием встроенного языка программирования MCS_SCRIPT (разработка компании Consistent Software).
Рис. 10

116
Рис. 11
Продемонстрируем процесс создания нового объекта на простом при мере. Создаем столбчатый фундамент с минимальным сочетанием размеров подошвы, подколонника и, для простоты, нулевого эксцентриситета. Следующий шаг —выполнение необходимого вида с простановкой необхо димых параметров (рис. 13).
Рис.12

117
Рис. 13
С помощью Мастера объектов описываем свойства нашего фундамента. Важно отметить, что новому объекту присваивается уникальный идентифи кационный номер (рис. 14). Для каждого исполнения объекта можно созда вать виды, соответствующие проекциям отображения объекта, с дополни тельными установками вида (скрытый, упрощенный вид, сечение).
Успешно определенный параметрический вид отображается во вкладке Графика (рис. 15). Специальный Мастер скриптов в пошаговом режиме сформирует математи ческое описание графического объекта (рис. 16).
Скрипт — это постоянно действующее описание параметрического по ведения объекта. Скрипт не является протоколом уже выполненных действий — он содержит правила будущих действий, которые будут производиться с объектом. Действия в скрипте определяются при помощи команддиректив, логических выражений, комментариев и математических функций.

118
Рис. 14
Рис. 15

119
Рис. 16
Достаточно точно и четко выполнить каждый шаг скрипта — и перед нами новый параметрический пользовательский объект: фундамент, создан ный с помощью Мастера скриптов.
В табличных параметрах отображаются введенные нами типоразмеры, выбрав которые мы отрисовываем план типового фундамента (рис. 17).
Рис. 17

120
При вводе дополнительных параметров в скрипт описания фундамента можно связать данные нашего объекта с табличной формой. В этом случае появится возможность автоматически получить, например, спецификацию к схеме расположения фундаментов (рис. 18).
Рис. 18
Параметрический объект базы может быть выполнен в динамическом режиме — на рис. 19 приведен пример такой отрисовки для вентиляционного проема.
Рис. 19
Проем, созданный с помощью Мастера объектов, был сохранен в базе пользовательских объектов, после чего с использованием идентификацион ного номера проема была создана пользовательская панель 1.

121
5. Примеры выполнения чертежей в СПДС GraphiCS. В завершение приведем несколько примеров, иллюстрирующих воз
можности СПДС GraphiCS при оформлении документации (Рис 20 а, б, в).
Рис. 20 а
Рис. 20 б

122
Рис. 20 в
Объекты СПДС выполнены, синим цветом.
Лекция 16
Основные чертежи марки АС и АР, выполняемые в АutoCAD.
План лекции: 1. Марки чертежей. 2. Литература по строительству. 3. Основная надпись на строительных чертежах. 4. Особенности выполнения чертежей марки АР и АС. 5. Понятие модуля. 6. Координационные оси. 7. План здания. 8. Разрез здания. 9. Фасад здания.

123
1. Марки чертежей Чертежи зданий и сооружений представляют собой комплекс ортого
нальных проекций на ряд плоскостей проекций. Эти чертежи должны отра жать внешний вид, внутреннее устройство здания и отдельные его детали, должны содержать различные сведения технологического характера.
Строительство зданий и сооружений ведется по утвержденным проек там. Проект – это комплекс документаций, в который входят различные чер тежи, необходимые для производства всех строительномонтажных работ по данному объекту, расчеты конструкций, теплотехнические и др. расчеты, по яснительные записки и сметы.
Проект обычно проходит две стадии проектирования: первая стадия – технический проект; вторая стадия – рабочая документация. Возможно выполнение проекта в одну стадию – рабочий проект.
Для удобства черт еж и маркируют ся. Марка чертежа зависит от изо браженных на нем конструкций или сетей и состоит из заглавных букв соот ветствующих элементов. Так, архитектурные чертежи содержащие архитек турные решения обозначаются маркой АР, если кроме архитектурных реше ний на чертежах изображены строительные конструкции – марка АС. Если объект состоит из различных конструкций, на каждую разрабатывается своя марка чертежей – КЖ, КД, КМ. Чертежи водопровода и канализации имеют марку ВК, отопления, вентиляции и кондиционирования – марку ОВ. Марка проставляется в основной надписи чертежа.
2. Литература по строительству. При разработ ке проект ов, а, следовательно, и выполнении чертежей,
руководст вуют ся дейст вующими нормат ивами и документ ами по проект и рованию и ст роит ельст ву, а именно: 1. Единая система конструкторской документации. Основные положения [Сборник]: ГОСТ 2.00193ГОСТ 2.12588. М.: Издво стандартов, 1983. 2. ГОСТ 21.10197. СПДС. Основные требования к проектной и рабочей до кументации. М.: Госстрой, 1998. 3. ГОСТ 21.50193 СПДС. Правила выполнения архитектурностроительных рабочих чертежей. М.: ГП ЦПП, 1996. 4. ГОСТ 21.20593 СПДС. Условные обозначения элементов санитарно технических систем. М.: Издво стандартов, 1994. 5. ГОСТ 21.20693 СПДС. Условные обозначения трубопроводов. М.: Издво стандартов, 1994.
В качестве учебной литературы могут быть рекомендованы следующие учебные пособия: 1. Будасов Б.В. Строительное черчение и рисование: Учебник для студентов строительных специальностей / Под редакцией Б.В. Будасова. 5ое изд., пере работанное и дополненное. М.: Стройиздат, 2002.

124
2. Будасов Б.В. Строительное черчение: Учебник для вузов / Б.В. Будасов, В.П. Каминский, 5ое изд., переработано и дополнено. М.: Стройиздат, 2002. 3. Брилинг Н.С. Черчение: Справочное пособие / Н.С. Брилинг, Н.С. Балягин. М.: Стройиздат, 1994. 4. Русскевич Н.А. Справочник по инженерностроительному черчению. / Н.А. Русскевич, Д.Т. Ткач, М.Н. Ткач. 2ое изд., переработано и дополнено. Киев: Будивельник, 1987. 5. Лошакова Н.Ю. Жилой дом. Методическое указание./ КрасГАСА. Красно ярск, 2003.
3. Основная надпись на строительных чертежах Чертежи зданий и сооружений выполняют на листах бумаги стандарт
ных форматов, установленных ГОСТ 2.30168. Рабочее поле определяется рамкой, проведенной сплошной основной линией на расстоянии 20 мм слева и по 5 мм от остальных сторон формата (рис 1).
Основную надпись на чертежах зданий и сооружений выполняют в со ответствии с требованиями ГОСТ 21.10197, как показано на рис.2.
В графах основной надписи (номера граф – в скобках) указывают: 1) обозначение документа и марку чертежа (05055017270301АР, где 05055017шифр института; 270301шифр специальности, АРмарка чертежа); 2) название кафедры; 3) название задания, выполняемого студентом; 4) условное обозначение стадии проектирования (У – учебный, П – стадия проекта; РД – рабочая документация); 5) название изображений, помещенных на данном листе; 6) название или различительный индекс студенческой группы; 7) Изм. 8) Кол. уч.; 9) Лист; 10) док.; 11) Подпись; 12) Дата; 13) Стадия; 14) Лист; 15) Листов; 16) Чертил; 17) Принял; 18) Фамилия (графы с 5 по 18 заполняются с заглавной буквы шрифтом 3,5). Заполнение основной надписи на чертежах может быть выполнено двумя способами: 1. Вычерчивание с помощью команд рисования в программе AUTOCAD и за полнение ячеек однострочным текстом;

125
2. Заполнение стандартной основной надписи выбранной из библиотеки спе цификаций СПДС GraphiCS с заполнением только граф 16 и 1618. Пример выполнения основной надписи показан на Рис. 1
Рис. 1
4. Особенности выполнения чертежей марки АР и АС.
Строительные чертежи имеют свою специфику и свои особенности в графическом оформлении. 1. Для общестроительных чертежей обычными являются масштабы: 1:50; 1:100; 1:200; 1:400. Масштабы 1:5; 1:10; 1:15; 1:20; 1: 25 служат для выполне ния чертежей различных конструкций и отдельных деталей. В масштабе 1:1 выполняются лишь чертежи шаблонов сложных по своему профилю тяг, кар низов и т.п. Масштабы увеличения вообще не применяются. 2. На строительных чертежах проекции имеют специфическое название. Так, вид на здание снаружи называется фасадом, вид на здание сверху, называется планом крыши, горизонтальный разрез, выполненный на уровне окон или на одну треть высоты помещения – план здания. Изображение здания, мыслен но рассеченного вертикальной плоскостью, называется разрезом здания. Раз резы могут быть продольные и поперечные. Высотой этажа называется высо та между чистым полом нижележащего и верхнего этажа. Высота помещения – размер от пола до потолка. 3. Часто отдельные проекции здания в силу своих больших размеров распола гаются на различных листах и, следовательно, не имеют непосредственной проекционной связи. 4. На чертежах марки АС и АР независимо от того, находятся между собой в проекционной связи отдельные проекции или нет, над каждым изображением

126
выполняется соответствующая надпись, характеризующая данное изображе ние, например, «План 1го этажа», «Фасад 15», «Разрез 11». 5. Строительные чертежи, вычерчиваются тонкими линиями. Толстой линией выполняют лишь контуры сечения. На разрезах видимые контуры элементов, находящихся за секущей плоскостью, вычерчиваются линией в 23 раза тоньше контура сечения. Сплошная основная линия должна иметь толщину не более 0,8мм. Отсюда, при обводке строительного чертежа, выполняемого в масштабе 1:100, толщины линий принимают равными: линии земли – 0,8мм; линии контура элементов, попавших в разрез – 0,6мм; линии контура зданий и проемов на фасаде – 0,4мм; линии элементов не показанных в разрезе, и контуров оборудования – 0,2мм; штриховые, выносные, размерные линии и маркировочные кружки – 0,2мм. 6. На строительных чертежах размерные линии снабжаются не стрелками, а утолщёнными засечками, проведенными под углом 45° к размерной линии. 7. Размеры на чертежах указываются в миллиметрах (кроме чертежей марки ГП), и наносятся в виде цепочки (размерная цепочка). Размерные числа на строительных чертежах могут быть расположены над размерной линией, под ней или на полочке. 8. Количество размеров на чертежах должно быть достаточным для опреде ления параметров объекта, оно может повторятся на различных видах. Пра вила простановки размеров на планах, разрезах, фасадах определяет ГОСТ 21.50193.
При выполнении чертежей в графических программах приведенные па раметры настраиваются специальными командами.
Для программы AUTOCAD подготовка чертежа начинается с задания лимитов изображения, режимов рисования и подготовки данных свойств примитивов (Рис. 2, 3). Для этого используется падающее меню Формат и Сервис.
Рис.2

127
Рис.3
Основными элементами черчения в AutoCADе являются примитивы – объекты выполняемые за одну команду программы, заканчивается которая нажатием клавиши ENTER на клавиатуре или правой кнопки «мыши». Свой ства примитивов устанавливаются в падающем меню Формат (рис. 2) или при подготовки слоев (Рис. 4).
рис. 4

128
Тип линий, цвет и толщина задаются через падающее меню диспетчера свойств слоев (Рис. 5,6).
Рис. 5
рис. 6
Задание параметров размерных и выносных линий выполняется через падающее меню (рис.7, 8).

129
рис. 7
рис. 8

130
5 Понятие модуля
Модулем называют условную единицу измерения, применяемую для координации размеров здания или сооружения, их элементов, деталей и строительных изделий (плит перекрытия, оконных и дверных блоков, лест ничных маршей и т.п.). Модуль условно обозначается буквой «М» и равен 100мм. Кроме основного модуля существуют укрупненный и дробный моду ли. Укрупненный модуль больше основного в целое число раз: 3М, 6М, 12М, 15М, 30М, 60М, 72М, 84М, 90М. Дробный модуль меньше основного:1/2М, 1/5М, 1/10М, 1/20М, 1/50М, 1/100М. На основе укрупненных модулей произ водится конструирование зданий, привязка их к местности. Для этого исполь зуют координационные оси.
6. Координационные оси.
Координационные оси – взаимно перпендикулярные линии, опреде ляющие положение на плане здания или сооружение основных и ограждаю щих конструкций. Координационные оси наносят тонкими штрихпунктир ными линиями толщиной S/3. Обозначение начинают с левого нижнего угла плана. Оси, определяющие пролет здания обозначают последовательно про писными буквами русского алфавита, оси определяющие шаг здания – араб скими цифрами. Координационные оси присваиваются только конструкциям, под которые выполняются фундаменты. Обозначение проставляются в круж ках диаметром 812мм. Шрифт для обозначения координационных осей дол жен быть на один – два размера крупнее шрифта, принятого для разменных чисел на том же чертеже.
7. План здания. Горизонтальный разрез, выполненный на уровне окон или на одну
треть высоты помещения, называется планом здания. Количество изображе ний планов здания зависит от сложности объекта, количества и однотипности этажей. Обозначение планов может быть следующим: «План на отм. 0.000», «План первого этажа», «План типового этажа». Исходя из определения на плане изображаются конструкции здания попадающие в разрез и находящие ся ниже уровня разреза. Допускается изображать элементы расположенные выше уровня разреза с использованием условных обозначений согласно ГОСТ 21.10197.
Вычерчивание плана начинается с изображения координационных осей. Далее к осям привязываются ограждающие и несущие конструкции. К ним относятся стены, колоны, стеновые панели. Привязка элементов зависит от назначения конструкций они могут быть несущими (воспринимающие на грузки от вышележащих конструкций и собственный вес) и самонесущими (воспринимающие только собственный вес) и места расположения в здании – наружные и внутренние. Привязка внутренних конструкций всегда централь

131
ная, наружных модульная или нулевая. В зависимости от материала и места строительства стены имеют определенную толщину. Так наружные кирпич ные стены могут быть толщиной 510, 640, 770, 900, 1030, 1160 мм; внутрен ние кирпичные стены – 380, 250мм; перегородки кирпичные – 120, 65 мм (все эти величины кратны размерам кирпича 250×120×65) с учетом десятимилли метровой толщины раствора. Обозначение осей (рис.9) и привязка стен к осям (рис. 10).
рис. 9
рис. 10

132
Последовательность выполнения чертежа плана здания в программе Auto CAD (рис.11):
1. Нанесение координационных осей (для этого необходимо задать слои с свойствами);
2. Вычерчивание стен (способы вычерчивания стен могут быть различ ными – черчение отрезков, полилиний с дальнейшим их КОПИРОВА НИЕМ или выполнением команды ПОДОБИЕ, вычерчивание МУЛЬ ТИЛИНИИ с параметрами толщины стены или черчение ПРЯМО УГОЛЬНИКА с выполнением команды ПОДОБИЕ);
3. Далее необходимо в подготовленные стены вставить окна и двери с по мощью команд СОЗДАНИЕ и ВСТАВКА БЛОКА;
4. На следующем этапе необходимо вычертить с помощью условных обо значений изображения умывальника, раковины, мойки, ванной, унита за;
5. С помощью команды СВЕДЕНИЯ из падающего меню СЕРВИС опре делить площадь помещений;
6. В заключении проставить необходимые размеры и площади на плане и заполнить спецификацию согласно ГОСТ 21.50193.
Рис. 11 Размеры окон и дверей принимать в зависимости от материала согласно
ГОСТ 2374788 Двери из алюминиевых сплавов, ГОСТ 662988 Двери дере вянные внутренние для жилых и общественных зданий, ГОСТ 3067499 Бло

133
ки оконные из поливинилхлоридных профилей, ГОСТ 309702002 Блоки дверные из поливинилхлоридных профилей, ГОСТ 309712002 швы монтаж ные узлов примыканий оконных блоков к стеновым проемам, ГОСТ 2316699 Блоки оконные, ГОСТ 2470099 Блоки оконные деревянные со стеклопакета ми. При вставке оконных и наружных дверных блоков необходимо учитывать изображение четвертей для кирпичных стен, согласно размерам кирпича и величины шва.
8. Разрез здания. Разрез должен выявить характерные особенности объекта в вертикаль
ном направлении. В зависимости от марки чертежей разрезы бывают архи тектурные и конструктивные. Архит ект урные разрезы содержат данные об общем объемнокомпозиционном решении, а также упрощенные изображе ния элементов наземной части здания. Конст рукт ивные разрезы кроме объ емнопланировочного решения содержат изображения конструкций, марки ровку узлов и конструктивных элементов.
Положение секущей плоскости показывают на плане. Она должна про ходить по оси оконного и дверного проемов и по одному из маршей лестни цы, так чтобы по направлению взгляда были видны оба марша. Разрез вы полняется по плану и условию задания. Вычерчивание разреза рекомендуется вести в следующей последовательности:
1. Провести горизонтальную прямую линию и принять ее за линию с от меткой 0.000, что соответствует уровню чистого пола лестничной пло щадки 1го этажа;
2. Согласно плана и направления взгляда провести координационные оси, используя СЛОЙ оси и команды РЕДАКТИРОВАНИЯ;
3. С учетом привязки координационных осей провести линии контура ка питальных стен. Вниз от намеченных горизонтальных прямых отло жить толщину перекрытия 300мм. Она складывается из толщины плиты перекрытия – 220мм и толщины пола 80мм. Показать верх чердачного перекрытия, контур кровли, карниз, цоколь. Для выполнения чертежа использовать черчение ОТРЕЗКОВ и ПОЛИЛИНИЙ;
4. Изобразить контуры перегородок и дверных проемов, попавших в се чение и видимых по направлению взгляда. При этом следует иметь в виду, что высота квартирных дверей 2070мм, входной в подъезд 2370мм;
5. Вычертить лестничную клетку используя команду КОПИРОВАНИЯ; Лестничная клетка состоит из лестничных маршей, площадок и ограж дений. Лестничные площадки на уровне каждого этажа называются эт аж ными, между этажами – промеж ут очными. Каждый марш для одной из лестничных площадок будет восходящим, для другой – нис ходящим. Восходящий марш начинается нижней фризовой ступенью, нисходящий – верхней фризовой ступенью. Фризовой называется сту

134
пень, расположенная на одном уровне с лестничной площадкой, поэто му она фактически входит в площадку, увеличивая ее ширину. Основ ным элементом лестницы является ступень. Вертикальную грань сте пени называют – подст упёнком, горизонтальную грань – прост упью. Размер проступи – 300мм, подступенка, в зависимости от высоты эта жа, может быть 150155мм. Фризовая ступень имеет ширину 220мм. (рис. 12).
рис. 12
6. Далее необходимо вычертить все элементы конструкций, попадающие в разрез и расположенные за плоскостью разреза. Это окна, двери, кар низные и балконные плиты, трубы вентиляционных каналов, огражде ния на крыше и т.д. Для выполнения однотипных элементов необходи мо использовать команду СОЗДАНИЯ и ВСТАВКИ БЛОКА.
7. Оформление разреза и простановка размеров выполняется согласно ГОСТ 21.50193. Для простановки размеров необходимо создать новый СЛОЙ. Последовательность вычерчивания размеров следующая: с внешней стороны разреза на расстоянии 1215мм, по обе его стороны, дать размерные цепочки, определяющие последовательно высотные размеры проемов и простенков, а также размеры других элементов сте ны, цоколя, карниза и т.д. На расстоянии 1015мм от размерной цепоч ки проставить высотные отметки верха конструкций, цоколя, уровня земли, для этого необходимо СОЗДАТЬ БЛОК. Полки высотных отме ток повернуть наружу. Внутри разреза дать цепочки размеров, опреде ляющих высоту помещений и толщину перекрытия, а также высоту по

135
доконников, внутренние высоты оконных проемов, и расстояния от верха оконных проемов до низа покрытий. На общей вертикальной ли нии проставить отметки лестничных площадок, при этом следует иметь в виду, что пол на 20мм ниже лестничной площадки (Рис. 13).
рис. 13
8. Фасад здания
Фасадом называется вид спереди на здания в направлении взгляда. У здания есть центральный фасад, показывающий лицевую часть здания с цен тральным входом, боковые (торцевые) фасады, внутренний (задний) фасад. Фасад обозначается соответствующими буквами или цифрами, зависящими от направления взгляда. На фасаде может быть условно показана отделка, на правление падающих и собственных теней, антураж. Возможно цветовое оформление фасада. Последовательность вычерчивания следующая: 1. С помощью координационных осей и высотных уровней строится кон
тур фасада, для этого используются ПРИМИТИВЫ из падающего меню РИСОВАНИЕ, и команды РЕДАКТИРОВАНИЯ;
2. Наносятся изображения элементов видимых на фасаде. Размер окон и дверей на фасаде соответствует величине проема на плане и разрезе (по высоте). Для балконных плит выполняется ограждение на высоту

136
1200мм. Величина вентиляционных шахт зависит от размещения их в плане, по толщине они равны 380мм;
3. На крыше показывают ограждение высотой 600 мм, с шагом опор 1200мм. При высоте здания более 10м на фасаде необходимо показать элементы сливной системы;
4. На фасаде показываются только крайние координационные оси и вы сотные отметки низа оконных проемов, верха конструкций козырька, низа балконных плит и карниза, верха вентиляционных шахт и конька крыши;
5. Оформление заканчивается построением теней и условным обозначе нием материалов отделки для этого используется команда ШТРИХОВ КИ или ГРАДИЕНТНАЯ ЗАЛИВКА (Рис.14).
рис. 14
Вопросы для самоконтроля по строительному черчению. 1. Указать не менее семи отличий строительных чертежей от машинострои тельных. 2. Как маркируются строительные чертежи? 3. Что такое единая модульная система (ЕМС) в строительстве? 4. Цель применения ЕМС. 5 Что такое модуль и какова его численная величина? 6. Перечислить основные конструктивные элементы здания. 7. Что такое проём? 8. Что такое простенок? 9. Дать определение координационных осей. 10. Обозначение координационных осей. 11. Как выполняется привязка наружных стен к координационным осям? 12. В каком случае применяется центральная привязка?
137
13. Что такое план этажа? 14. Какой толщины применяются линии при вычерчивании плана этажа зда ния? 15. Условные обозначения сантехнического оборудования. 16. Сколько цепочек используется при простановке наружных размеров пла на этажа здания? 17. Как на плане этажа указывается площадь помещения? 18. В каких единицах проставляются размеры на плане этажа здания? 19. Дать определение разреза здания. 20. Какие бывают разрезы здания? 21. Уровень какого элемента конструкции жилого дома принимают на разре зе за нулевой? 22. Как на плане необходимо провести секущую плоскость для выполнения разреза здания? 23. Что такое проступь и подступёнок ? 24. Дать определение фризовой ступени. 25. В каких единицах и как проставляются размеры на разрезе здания? 26. Почему на разрезе здания лестничные марши показываются линиями раз ной толщины? 27. Дать определение фасада здания. 28. Толщина линии, показывающей землю. 29. Могут ли план, разрез и фасад здания располагаться на разных форматах? 30. Где на строительных чертежах указывается масштаб?
Лекция 17
Экспортирование и импортирование данных для создания чертежей в программе AutoCAD План лекции: 1. Устройства ввода 1.1 Дигитайзер 1.2 Сканеры 1.3 Цифровые фотокамеры 2. Импортирование данных в AutoCAD 3. Экспортирование данных из AutoCADа
Математическое и программное обеспечение компьютерной графики нельзя рассматривать в отрыве от аппаратных средств, применяемых на раз личных этапах работы с изображениями. Все эти средства принято делить на три большие группы:
1. устройства ввода (сканеры, дигитайзеры/графические планшеты, циф ровые фото и видеокамеры);

138
2. устройства вывода (мониторы, принтеры, плоттеры, цифровые проек торы);
3. устройства обработки (графические ускорители, кодеры MPEG и др.). Поскольку детальная информация о принципах действия, параметрах и
применении вышеперечисленных устройств дается в соответствующих раз делах других курсов, например «Информатика», подробнее остановимся только на аппаратных средствах первой группы.
1. Устройства ввода Существуют различные технические средства, осуществляющие про
цесс преобразования изображений в цифровую форму, например: сканеры, дигитайзеры (графические планшеты), цифровые фото и видеокамеры. В ка ждом конкретном случае важно правильно выбрать нужное устройство, руко водствуясь его техническими характеристиками, для получения оцифрован ного изображения с требуемой детальностью и цветовой гаммой.
1.1 Дигитайзер Дигитайзер (digitizer) это кодирующее устройство, обеспечивающее
ввод двумерного (рис.1) или трехмерного (3D дигитайзеры рис.2 а,б) изо бражения в компьютер в виде растровой таблицы. Является типичным внеш ним специализированными устройства графического ввода.
Художник создает изображение на экране, но его рука водит пером по планшету. Как правило, планшет используют профессиональные художники для более точной обработки (создания) изображений. Кроме того, дигитайзер можно использовать просто как аналог манипулятора «мышь».
Рис. 1

139
а б
Рис. 2
Дигитайзер, или планшет, как его часто называют, состоит из двух ос новных элементов: основания и курсора, двигающегося по его поверхности. Принцип действия дигитайзера основан на фиксации местоположения курсо ра с помощью встроенной в планшет сетки. При нажатии на кнопку курсора его местоположение на поверхности планшета фиксируется, а его координа ты передаются в компьютер. Сетка состоит из проволочных или печатных проводников с довольно большим расстоянием между соседними проводни ками (от трех до шести мм).
Оцифровывать можно в полуавтоматическом и ручном режимах. Кон тактный щуп (рис.2), установленный на складной арматуре с шарнирными соединениями, считывает информацию о том, в каком месте находится го ловка, и транслирует эту информацию в координаты X, Y и Z в трехмерном пространстве. Оцифрованные данные в дальнейшем обрабатываются с помо щью специальных прикладных программ (AutoCad, Autodesk, Maya, Rhinoceros и др.). Подключение Планшета в AutoCAD выполняется через па дающее меню СЕРВИС ПЛАНШЕТ (рис.3).

140
Рис.3
Следует отметить, что в работе планшетов возможны помехи со сторо ны излучающих устройств, в частности мониторов. Независимо от принципа регистрации существует погрешность в определении координат курсора, именуемая точностью дигитайзера. Эта величина зависит от типа дигитайзера и от конструкции его составляющих. Точность существующих планшетов ко леблется в пределах от 0.005 дюйма до 0.03 дюйма. Данное сканирование яв ляется механическим. Но кроме этого, есть и другие технологии трехмерного сканирование: ультразвуковое, магнитное и лазерное сканирование.
Из всех трехмерных технологий сканирования, ультразвуковые систе мы наименее точны, наименее надежны и наиболее восприимчивы к геомет рическим искажениям. Вследствие того, что скорость звука зависит от воз душного давления, температуры и других атмосферных условий, эффектив ность ультразвуковых систем может изменяться вместе с погодой. Кроме то го, они восприимчивы к работе различного оборудования, даже шуму ламп дневного света.
Магнитные трехмерные цифровые преобразователи работают на том же принципе, что и "ультразвуковые системы", т.е. используют магнитное поле. Они невосприимчивы к атмосферным изменениям и очень чувствительны к искажениям от близлежащего металла или магнитных полей. Металлические стулья, платы, компьютеры или другое оборудование, размещенные близко от магнитного цифрового преобразователя, исказит данные. Кроме того, та

141
кие системы нельзя использовать для оцифровки объектов с металлическими частями.
Лазерные сканеры в 10100 раз дороже, чем системы механической оцифровки, такие, как MicroScribe3D. Системы, использующие лазеры, имеют много ограничений. Объекты с отражающими или яркими поверхно стями, большие объекты и объекты с вогнутыми поверхностями, которые за теняют прямой путь лазерного луча главная проблема для лазерных систем.
1.2 Сканеры Сканером называется устройство, позволяющее вводить в компьютер
образы изображений, представленных в виде текста, рисунков, слайдов, фо тографий или другой графической информации. Традиционно сканеры слу жили для решения специализированных задач: ввода и запоминания изобра жений в настольных издательских системах, организации хранения текстовых документов в юридических фирмах и т. п. С появлением почти у каждого собственных страниц Web и повсеместным распространением цветных струйных принтеров сканеры быстро превращаются в универсальные на стольные средства подобно принтерам и модемам.
Принцип действия практически всех типов сканеров един. Он основан на том, что направленным лучом освещаются отдельные точки исходного изображения (оригинала) и отраженный в результате луч воспринимается фо точувствительным приемником, где информация о «цвете» точки интерпре тируется как конкретное численное значение, которое через определенный интерфейс передается в компьютер.
По механизму перемещения матрицы светочувствительных элементов относительно оригинала выделяют следующие типы сканеров:
Планшетный сканер (Flatbed Scanner) – сканер, в котором оригинал кладется на стекло и сканируется при помощи подвижной линейной матрицы Размеры матрицы и системы фокусировки подобраны так, чтобы вести ска нирование листа по всей ширине.
Ручной сканер (Handheld Scanner) – портативный сканер, в котором сканирование осуществляется путем ручного перемещения сканера по ориги налу. По принципу действия такой сканер аналогичен планшетному. Ширина области сканирования не более 15 см.
Барабанный сканер (Drum Scanner) – сканер, в котором оригинал за крепляется на вращающемся барабане. При этом сканируется точечная об ласть изображения, а сканирующая головка движется вдоль барабана на очень маленьком расстоянии от оригинала.
Оригиналы для сканирования можно разделить на две большие группы: прозрачные и непрозрачные. К непрозрачным относятся всевозможные фото графии, рисунки, страницы газет и журналов и т.д. Их мы видим в так назы ваемом отраженном свете. В прозрачных оригиналах (к этой группе относят

142
ся различные негативы, слайды и т.д.) наш глаз обрабатывает свет, прошед ший сквозь оригинал.
Для полноценной работы сканера нужна соответствующая программа, или драйвер. Так появился TWAIN стандарт, согласно которому, осуществ ляется обмен данными между прикладной программой и устройством. TWAIN – стандарт используется в программах растровой графики Photoshop и Corel Photo pain.
1.3 Цифровые фотокамеры Цифровая камера получает изображения, обрабатывает их и хранит в
цифровом формате. Вместо пленки она ис пользует встроенную или сменную полу проводниковую память, чтобы хранить снимки. Она обладает теми же основными свойствами, что и нормальная фотокамера, и, помимо этого, может соединяться с ком пьютером, телевизором или принтером. Поскольку обработка кадра происходит не посредственно в камере, пользователь мо жет сразу проверить правильность полу ченного изображения, напечатать его или послать по электронной почте.
Принцип действия цифровой фотокамеры аналогичен принципу дейст вия видеокамеры и состоит в следующем. Пучок лучей света от объекта съемки, проходя через линзу (или систему линз) объектива и диафрагму, по падает на матрицу CCD (Charged Coupled Device). Матрица CCD или, как ее еще называют, ПЗС (преобразователь светсигнал) представляет собой пря моугольную матрицу из светочувствительных элементов. Луч света, попадая на чувствительный элемент, преобразуется в аналоговый электрический сиг нал. Аналоговые сигналы от CCD преобразуются в цифровые, обрабатывают ся и записываются в память. Преобразование сигналов в цифровую форму производится с помощью аналогоцифрового преобразователя ADC.
Кроме CCD, ADC и памяти в электрическую схему цифровой фотока меры входят процессор DSP, который формирует изображение из цифровых потоков, и конвертор JPEG, сжимающий изображения для увеличения коли чества хранимых кадров. Сменная память используется в цифровых камерах для увеличения количества сохраняемых кадров и, чаще всего, представляет собой Flashкарту памяти.
2. Импортирование данных в AutoCAD Ввод данных в программу может быть выполнен несколькими спосо
бами, в зависимости от расширения обрабатываемого файла. 1. С помощью команды ИМПОРТ падающего меню ФАЙЛ (рис. 4).

143
Рис.4 2. С помощью падающего меню Вставка, любой из представленных
файлов (рис.5).
Рис.5 Растровые изображения можно вставить непосредственно через диало
говое окно выбор файла изображения (рис.6).

144
Рис.6 AutoCAD поддерживает все форматы файлов оболочки Windows, по
зволяет обрабатывать их как растровые изображения (масштабировать, опре делять порядок расположения, изменять яркость и контраст). Для работы с изображением как с векторным объектом его необходимо растрировать и пе ревести в векторный режим. Для это служат несколько программ векториза ции таких как:
Spotlight 5.1 обеспечит коррекцию сканированных изображений, внесение любых необходимых изменений, добавление новых растровых и векторных данных, выборочную векторизацию полуавтоматическом и автоматическом режимах, распознавание текстовых надписей и т. д.
RasterDesk 5.1 идеальный вариант для пользователей AutoCAD, по зволяющий работать с растровой графикой в знакомой среде проектирования. Векторные операции выполняются средствами AutoCAD; возможности рас трового редактирования и векторизации те же, что в Spotlight.
3. вставка объекта непосредственно через буфер обмена Windows.
3. Экспортирование данных из AutoCADа В зависимости от поставленной задачи возможность экспорта может
быть различной. 1. Через падающее меню ФАЙЛ – ЭКСПОРТ (рис.7).

145
Рис. 7
2. Для передачи изображений в растровый формат используется ко манда СОХРАНИТЬ ИЗОБРАЖЕНИЕ через падающее меню СЕР ВИС (рис. 8, 9).
Рис. 8

146
Рис.9 3. Для передачи изображения в растровый формат с сохранением па
раметров чертежа необходимо воспользоваться ДИСПЕТЧЕРОМ ПЛОТТЕРОВ (рис.10) и через мастер установок создать новый плот тер Post Script который использует установки программы Adobe (рис.11).
Рис. 10

147
Рис. 11 Экспортирование и импортирование данных необходимо для решения
конкретных задач проектирования. Необходимость вывода на бумажный но ситель определяет формат файла изображения. Чертежи для решения строи тельных задач – лучше распечатывать через AutoCAD. Для представления дизайнерского решения – форматы растровой графики программ Photoshop или Corel Draw.
При проведении векторизации четко разделяйте задачи нового проек тирования и редактирования ранее созданных на бумаге документов. Для второго случая взвесьте различные варианты, сравните время и трудозатраты на их реализацию.

148
Учебнометодические материалы по дисциплине Основная
1. Климухин А.Г. Начертательная геометрия: Учебник для вузов спец. «Архитектура»/ А.Г. Климухин – 2е изд., перераб. и доп. – М.: Стройиздат, 1978. – 335 с
2. Будасов Б.В. Строительное черчение: Учеб. Для вузов/ Б.В. Будасов, В.П. Каминский. – 4е изд., перераб. и доп. – М.: Стройиздат, 2002. – 464 c: ил
3. Короев Ю.И. Сборник задач и заданий по начертательной геометрии: Учеб. пособие для вузов/ Ю.И. Короев, Ю.Н. Орса; Под ред. Ю.И. Короева. – М.: АрхитектураС, 2003. – 168 с.: ил
4. Короев Ю.И. Начертательная геометрия: учебник для сту дентов архит. Специальностей вузов / Ю. И. Короев. – 2е изд., перераб. и доп.. – М.: АрхитектураС, 2006. – 424 с.: рис.Аннотация: Для сту дентов архитектурных вузов и факультетов.
5. Хейфец А.Л. Инженерная компьютерная графика AutuCAD. Учебное пособие. СПб, 2007.
6. Джефферис А. АutoCAD для архитекто ров.Учебник/МоскваСанктПетербургКиев, 2005 – 860с.
7. Т.Ю. Соколова. AutoCAD 2008 для студента. Пополурный самоучитель. – СПб.: Питер, 2008 – 336 с.: ил.
8. В.Н.Тульев. AutoCAD 20072008. Возможности и их прак тическое применение. – М.: СОЛОНПРЕСС, 2008.256 с.: ил.
Дополнительная 9. Архитектурное черчение: [учеб. Пособие]/ Д.И. Ткач, Н.П.
Русскевич, П.Р. Ниринберг, М.Н. Ткач; под ред. Д.И. Ткача. – Киев: Бу дивельник, 1991. – 272 с.: ил
10. Пеклич В.А. Начертательная геометрия: учеб. Для вузов/ В.А. Пеклич. – М.: Издво АСВ, 2000. – 248 с.: ил. Аннотация: В учеб нике содержатся разделы: «Перспектива», «Проекции с числовыми от метками», «Тени» и др.
11. Георгиевский О.В. Начертательная геометрия: Сборник задач с решениями типовых примеров/ О.В.Георгиевский. – М.: АСТ; М.: Астрель, 2002. – 104 с.: ил Аннотация: В сборник задач включены задания по начертательной геометрии для самостоятельной подготовки студентов.
12. Пеклич В.А. Упражнения и задачи по начертательной гео метрии: Учеб.пособие/ В.А. Пеклич. – М.: Издво АСВ, 2002. – 328 с.: ил
13. Георгиевский О.В. Справочное пособие по строительному черчению/ О.В. Георгиевский. – М.: Издво АСВ, 2003. – 96 с.: ил

149
14. ГОСТ 21.10197. СПДС. Основные требования к проектной и рабочей документации. – М.: Госстрой России, ГПЦНС ЦПП, 1998. – 41 с.
15. ГОСТ 21.50193. СПДС. Правила выполнения архитектур ностроительных рабочих чертежей. – М.: ГП ЦПП, 1996. – 41 с.
16. Черчение и начертательная геометрия . – М.: РХД, 2004. – 1 эл. Опт. Диск (CDROM). (Шифр 742630)
Методические разработки по дисциплине
17. Учебная программа дисциплины «Начертательная геомет рия и компьютерная графика» /Супрун Л.И., Красноярск; СФУ,2008 г.
18. Супрун Л.И. Перспектива и тени: Методические указания к самостоятельной работе студентов спец. 2901, 2903, 2905/ Красно ярск: КИСИ, 1992. 42 с
19. Супрун Л.И. Аксонометрия и тени: Методические указания к самостоятельной работе студентов спец. 2901, 2903, 2905/ Красно ярск: КИСИ, 1993. 67 с
20. Супрун Л.И. Метрические и конструктивные задачи: Мето дические указания к самостоятельной работе для студентов I курса/ Красноярск: КИСИ, 1994. 38 с
21. Супрун Л.И. Геометрическое моделирование в начерта тельной геометрии: Учеб. пособие; КИСИ. Красноярск, 1995. 160 с
22. Супрун Л.И. Олимпиады по начертательной геометрии и инженерной графике: Учеб. пособие; Краснояр. гос. архит.строит. акад.. Красноярск: КрасГАСА, 1998. 92 с
23. Л.И. Супрун, А.В. Слабуха. Тени архитектурных форм в ор тогональных проекциях: Метод. указания к самостоятельной работе для студ. 290100, 290200; Красноярск: КрасГАСА, 2002. 38 с
24. Супрун Л.И. Рабочая тетрадь по начертательной геометрии. Часть 1 для студентов спец. 270105, 270301, 270302: Красноярск: СФУ, 2008 30 с
25. Супрун Л.И. Рабочая тетрадь по начертательной геометрии. Часть 2 для студентов спец. 270105, 270301, 270302: Красноярск: СФУ, 2008 30 с
26. Н.Ю. Лошакова. Жилой дом : Метод. указания к заданию для студентов 4 курса спец. 030800 "Изобразительное искусство" и студ. 2 курса всех спец./ Красноярск: КрасГАСА, 2003. 52 с.: ил
27. Е.Г. Супрун. План и фасад крыши здания: метод. указания к самостоятельной работе для студ. спец. 291400, 290100, 290300, 290500, 030800 Красноярск: КрасГАСА, 2004. 32 с
17

150
28. Л.И. Супрун Е.Г. Супрун Сечение поверхности плоскостью: метод. указания к самостоятельной работе для студ. спец. 270301, 270302, 270105/; сост. Красноярск: СФУ, 2007. 44 с
29. Л.И. Супрун, Е.Г. Супрун. Пересечение поверхностей: ука зания к самостоятельной работе 270301, 270302, 270105; Красноярск: СФУ, 2008. 52 с
30. Л.И. Супрун. Инженерная геометрия: Учеб. пособие/; Красноярск: КрасГАСА, 1998. 68 с
31. Л.И. Супрун, Е.Г. Супрун. Конструирование архитектурной оболочки: указания к самостоятельной работе 270301, 270302.
32. Лошакова Н.Ю. Курс лекций по «Основам компьютерной графики» в электронном виде.
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ AutoCAD, AutoCAD Architecturе.