Embed Size (px)
Citation preview

书书书
第1章 经典力学基础
11 题 外 话
本书是为《经典力学》一书配套的“题谱”或“习题集”.
《经典力学》一书的主线是Lagrange力学和Hamilton力学,但为了现实的需要,
在书的第一章中仍然介绍了Newton质点和质点系力学,NewtonEuler刚体力学和
HookeNavier弹性力学等内容.从原则上来说,大学普通物理(力学)中比较深入,而
数学上当时还不能讲授的内容,都应该归入这一章.以数学角度来看,从 Newton
Euler刚体力学中涉及张量往后的内容,当时都还不能讲授.因此,涉及张量往后的内
容都是区别于大学普通物理(力学)的新课题.
涉及张量以前的内容,一般来说都可以在大学普通物理(力学)的范围内讲授.但
是其中也有难点,例如Newton力学非惯性参考系中的问题以及某些动力学问题.第
一章中关于Newton质点和质点系力学的习题就是围绕这两个难点设置的.
人们常常会问:为什么会是“力学”?自然科学中首先引起人们注意,并立即可以
进行数学计算(W.Heisenberg称之为“严密自然科学”)的,为什么会是“力学”?从
当时的情况来看,起码还有“光学”也是 Huygens和Newton所关心的学科.从数学
的难易程度和物理原理的简繁程度来看,“热力学”也比力学来得简单.物理学发展到
今天,“光学”还是那个样子;热力学就更不用说了,它与经典力学相比就如小学生与
大学生相比.经典力学之所以发展到如此地步,很大程度有赖于 Newton,Euler,
d’Alembert,Lagrange,Hamilton和Routh等人的工作.
实际上所有的作为“严密自然科学”的物理学,从理论角度来区分,一共只有两
类,即“粒子”物理学和“系综”物理学.Newton《自然哲学之数学原理》一书的第二编
“物体(在阻滞介质中)的运动”,讲的是流体力学,实际上就是“系综”物理学,尽管
“Euler描述”是Euler发明的,尽管“系综”一词直到Gibbs时代才出现.流体动力学
是“系综”的,统计力学必须是“系综”的,所有关于场、多自由度系统和相对论的量子
力学必然是“系综”的.只有Einstein的广义相对论,才兼顾了“系综”(Einstein场方
程)和“粒子”(短程线方程,即粒子运动方程).deBroglie根据广义相对论的处理方
法,也提出过兼顾“系综”和“粒子”的所谓量子力学的“双重解理论”.而作为经典力学
顶峰的Lagrange力学和Hamilton力学,既可以被用于处理“粒子”,又可以被用于处
理“系综”.但是,对于流体动力学和广义相对论中Einstein场方程这样的问题,La
grange力学和 Hamilton力学是无能为力的.其最主要的原因是,在这些问题中写不
出它们的能量表达式.在广义相对论中,没有能量守恒也没有动量守恒,只有能量-
动量张量的守恒.凡是可以写出能量表达式的,都可以纳入Lagrange力学和 Hamil
ton力学的体系,凡是写不出能量表达式的,都不能纳入Lagrange力学和 Hamilton
力学的体系.从这一意义上来说,流体动力学与Lagrange力学和 Hamilton力学体
系,属于完全不同的范畴.
本书的第一章中关于Newton质点和质点系力学的习题解答,主要就是非惯性
参考系中的问题以及某些动力学问题的解答.值得一提的是,对某些动力学方面的习
题,本书采用了Lagrange力学中的解法.这样做的目的首先当然是解答的需要,因为
对某些动力学习题来说,采用Newton力学的解法显得十分笨拙和艰难.思维的体操
固然需要,但过度的“体操”也没有什么必要.既然有了新式武器,抛弃旧式器械就属
必然.正如没有人笨到在已有了代数的今天,再去花脑筋用十分复杂的四则算术题的
方法解题一样.何况,采用了Lagrange力学中的解法可以对正确解题有所启发,这种
“杀鸡用牛刀”的代价仍是值得的.读者如果有精力的话,可以试着用Newton力学的
解法来处理同一个问题;看看对某些习题来说是否十分艰难,以及用Lagrange力学
中的解法是否对正确解题有所启发.
同时,用Lagrange力学中的解法处理某些动力学方面的习题的另一个目的是与
第2章的习题解答相衔接,相呼应,以保持本书在风格上的统一;而且也扩大了
Lagrange力学的应用范围.所有的动力学问题,都可以用Lagrange力学中的解法来
处理.实际上,对动力学问题而言,甚至对某些运动学问题(参见题1.6)而言,用
Lagrange力学中的解法,是最简便、最为程式化的.
于是,可以粗略地说,就力学问题而言,尤其是就动力学问题而言,中学物理(力
学)主要涉及的是守恒定律(动量守恒、角动量守恒和机械能守恒),其数学工具是代
数;大学普通物理(力学)主要涉及的是微分形式的Newton力学方程,其数学工具是
微积分;到了大学理论物理(经典力学)阶段主要涉及的是分析力学,包括Lagrange
力学和 Hamilton力学,其数学工具有张量、矩阵、高等代数以及非线性分析等.
本书的第1章中关于刚体力学的习题解答,主要涉及刚体转动惯量的计算以及
它们在坐标旋转变换和平移变换下的变换公式;除此之外,就是Euler运动学方程和
动力学方程.就数学方面而言,正是从这里开始引入了张量的概念.
刚体作为描述物体的第二个简单模型,正如 W.Pauli所说,它在相对论中“是没
有地位的”,因为信号的传播速度不可能无穷大.某些人企图在刚体问题中引入相对
论表达式,“研究”所谓“转动相对论”问题,在本质上就是错误的.在相对论中,没有
2 经典力学题谱
“刚体”这种概念.但是,在狭义相对论的推理过程中,那把“尺子”应该是刚体(尽管会
“尺缩”),惯性坐标系应该是刚体,因此Einstein认为,在狭义相对论中,作为刚体的
“尺子”和“时钟”是最基本的.
关于张量计算方面的习题,在《经典力学》一书中是放在“附录A”里的,现在移到
本章中.大学本科的学生,尤其是理科的学生,如果不懂张量,则如失去飞翔的翅膀.
现代理论物理学和现代理论力学的文献资料大多是用张量形式写成的;如果没有张
量知识,那将在后续工作中寸步难行.张量的引入其实很简单:一个面是由其法线方
向决定的,每个法线矢量有3个分量;一个力也是矢量,它也有3个分量;将力的3个
分量除以面的法线的3个分量,就得到9个分量;这就是最简单的2阶张量.有了这
个概念之后,再加上“Einstein求和约定”,就自然引出了张量计算.张量计算的特色
也是它的迷人之处在于“换角标”.张量计算重在“计算”,没有计算,就不会熟练应用;
这是屡试不爽的经验!
本书的第1章中关于弹性力学的习题解答,都是最基本的问题;希望通过对这些
习题的计算,使读者对弹性力学有一些基本的了解.当然,较为深入的问题无非也是
同样的类型,只是程度不同而已.信号在弹性体内的传播速度有“纵波速度”和“横波
速度”两种、三个方向(因为有两个方向的“横波”),其数量级有可能超过“声速”但决
不会达到光速;因此绝不可能有“相对论弹性力学”这种学问.弹性力学是“Lagrange
描述”的,与“Euler描述”的流体动力学完全不同;有些人企图将“Lagrange描述”的
弹性力学与“Euler描述”的电磁场(电磁场理论是相对论的)结合起来,构建所谓“磁
弹性力学”,在理论框架上同样是完全错误的.弹性力学在建筑,道路桥梁,航天航空,
甚至器件制造和生物医学工程问题中都有重要的应用.弹性力学非常数学化,实际上
(正如Landau和Lifshitz所说)就是应用数学.线弹性力学问题,已有“通解”形式,因
而以物理学家的眼光来看,已经全部解决;当然与其相关的习题都是线性方程的解,
所以也不会太为艰难.而对非线性弹性力学的问题,至今尚无好的解法;通常是作一
些数学变换,让非线性弹性力学的运动微分方程化为已知的典型非线性方程(例如
“三波相互作用方程”,KdV方程等,对弹性力学而言主要是非线性Schrdinger方
程),这就算解出来了.
小学生非要解出个一二三来,中学生只要解出代数表达式即可.到了大学低年
级,是解线性的典型方程(如椭圆方程,抛物型方程,双曲型方程)并附之以特殊函数;
再到了大学高年级,只需将已知的方程化成标准的非线性方程就可以了.
3第1章 经典力学基础
12 本 章 主 题
1犖犲狑狋狅狀质点和质点系力学
(1)相对坐标系以角速度ω转动时的绝对导数或随体导数
d
d狋=
d
d( )狋′+ω×
式中 d
d( )狋′为相对导数或当地导数.(2)Poisson公式
d犲犽d狋=ω×犲犽 (犽=1,2,3)
式中犲犽 为(狓1,狓2,狓3)方向的单位矢量.Poisson公式在圆周运动中的应用是
d犲狉d狋=ω犲θ
d犲θd狋=-ω犲
烅
烄
烆狉
式中犲狉,犲θ 分别为(狉,θ)方向的单位矢量,ω是ω 的模.
(3)绝对速度和绝对加速度的一般形式
狏=狏0+狏′+ω×狉′
犪=犪0+犪′+β×狉′+ω×(ω×狉′)+2ω×狏{ ′
式中
狉0 是惯性系原点犗至非惯性系原点犗′的位矢
狉′是相对位矢
狉是绝对位矢
狏0 =d狉0d狋
狏′=d
d( )狋′狉′是相对速度
狏=d狉d狋是绝对速度
犪0 =d狏0d狋=d2狉0d狋2
β=dωd
烅
烄
烆 狋
(4)平面极坐标系中的速度和加速度
4 经典力学题谱

狏=狉·犲狉+狉θ
·
犲θ
犪= (̈狉-狉θ·2)犲狉+(狉θ
¨+2狉
·θ·
)犲烅烄
烆 θ
式中犲狉,犲θ 分别为(狉,θ)方向的单位矢量.
(5)自然坐标系中的速度和加速度
狏=狏犲τ =d狊d狋犲τ
犪=d2狊
d狋2犲τ+
d狊d( )狋
2dθd狊犲狀 =
d狏d狋犲τ+
狏2
ρ犲
烅
烄
烆狀
式中犲τ,犲狀 分别为切向和法向的单位矢量,狊为曲线的弧长,θ为犲τ 与狓1 坐标轴之间的夹角;而
ρ=d狊dθ
若约束方程是狓2 =犳(狓1),则
1
ρ=
犳″
[1+(犳′)2]槡 3
式中犳′=d狓2d狓1,犳″=
d2狓2d狓21
.
(6)动量定理,角动量定理和动能定理
d狆d狋=∑
犽
犉(犲)犽
d犑d狋=∑
犽
(狉犽×犉(犲)犽 )
d犜=∑犽
(犉(犲)犽 ·d狉犽)+∑
犽
(犉(犻)犽 ·d狉犽
烅
烄
烆 )
(犽=1,…,狀)
式中
狆=∑犽
犿犽狏犽 是总动量
犑=∑犽
(狉犽×犿犽狏犽)是总角动量
犜=∑犽
1
2犿犽狏
2( )犽
烅
烄
烆是总动能
(犽=1,…,狀)
而(犉(犲)犽 ,犉
(犻)犽 )分别是作用在第犽个质点上的外力和内力.
(7)质心运动定理,对质心的角动量定理和对质心的动能定理
d狆犆d狋=∑
犽
犉(犲)犽
d犑犆d狋=犕犆
d1
2∑犽犿犽狏′
2( )犽 =∑犽
(犉(犲)犽 ·d狉犽′)+∑
犽
(犉(犻)犽 ·d狉犽′
烅
烄
烆)
(犽=1,…,狀)
式中犿=∑犽
犿犽,狉犽′是第犽个质点在质心坐标系中的位矢;而
5第1章 经典力学基础
狆犆 =犿狏犆 =∑犽
(犿犽狏犽)
犑犆 =∑犽
(狉′犽×犿犽狏′犽)
犕犆 =∑犽
(狉犽′×犉(犲)犽
烅
烄
烆 )
(犽=1,…,狀)
(8)LaPlaceRungeLenz矢量
犃=狆×犑-犿犽狉狉
=const.vector
(9)位力定理
珚犜=-1
2狑
=-1
2∑犽(犉犽·狉犽)
式中狑是位力.
2犖犲狑狋狅狀犈狌犾犲狉刚体力学
(1)Euler运动学方程
ω=
(ψ·
sinθsinφ+θ·
cosφ)犻1+(-ψ·
sinθcosφ+θ·
sinφ)犻2+(ψ·
cosθ+φ·)犻3
(θ·
cosψ+φ·
sinθsinψ)犲1+(-θ·
sinψ+φ·
sinθcosψ)犲2+(ψ·
+φ·
cosθ)犲烅烄
烆 3
式中(犻1,犻2,犻3)是犓系(“绝对坐标系”)坐标轴的单位矢量,(犲1,犲2,犲3)是犓′系(“当地坐标系”)坐
标轴的单位矢量.
(2)转动惯量和惯量积
犐11 =∫ρ(狓22+狓
23)d犞
犐22 =∫ρ(狓23+狓
21)d犞
犐33 =∫ρ(狓21+狓
22)d
烅
烄
烆 犞
和
犐23 =-∫ρ狓2狓3d犞
犐31 =-∫ρ狓3狓1d犞
犐12 =-∫ρ狓1狓2d
烅
烄
烆 犞
式中ρ(狉)为刚体的质量体密度,体积元为d犞 =d狓1d狓2d狓3.
(3)常用的“转动惯量”
常用的“转动惯量”如表1.1:
6 经典力学题谱
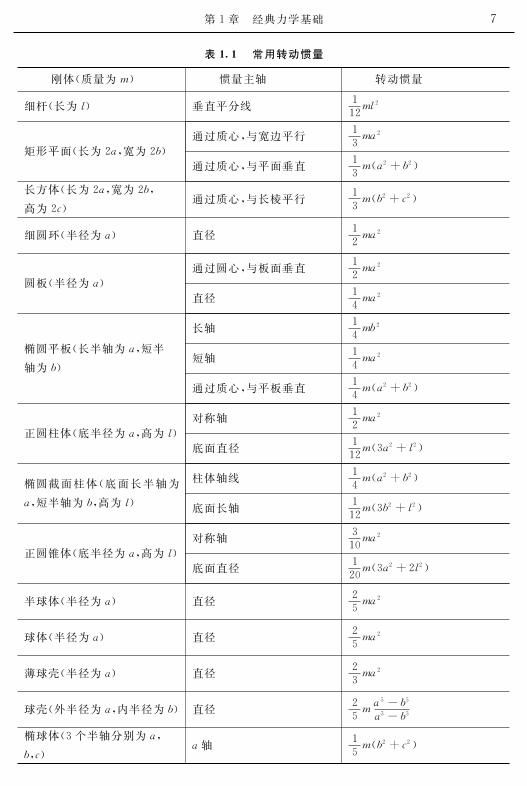
表11 常用转动惯量
刚体(质量为犿) 惯量主轴 转动惯量
细杆(长为犾) 垂直平分线 1
12犿犾2
矩形平面(长为2犪,宽为2犫)
通过质心,与宽边平行 1
3犿犪2
通过质心,与平面垂直 1
3犿(犪2+犫2)
长方体(长为2犪,宽为2犫,
高为2犮)通过质心,与长棱平行 1
3犿(犫2+犮2)
细圆环(半径为犪) 直径 1
2犿犪2
圆板(半径为犪)
通过圆心,与板面垂直 1
2犿犪2
直径 1
4犿犪2
椭圆平板(长半轴为犪,短半
轴为犫)
长轴 1
4犿犫2
短轴 1
4犿犪2
通过质心,与平板垂直 1
4犿(犪2+犫2)
正圆柱体(底半径为犪,高为犾)
对称轴 1
2犿犪2
底面直径 1
12犿(3犪2+犾2)
椭圆截面柱体(底面长半轴为
犪,短半轴为犫,高为犾)
柱体轴线 1
4犿(犪2+犫2)
底面长轴 1
12犿(3犫2+犾2)
正圆锥体(底半径为犪,高为犾)
对称轴 3
10犿犪2
底面直径 1
20犿(3犪2+2犾2)
半球体(半径为犪) 直径 2
5犿犪2
球体(半径为犪) 直径 2
5犿犪2
薄球壳(半径为犪) 直径 2
3犿犪2
球壳(外半径为犪,内半径为犫) 直径 2
5犿犪5-犫
5
犪3-犫3
椭球体(3个半轴分别为犪,
犫,犮)犪轴
1
5犿(犫2+犮2)
7第1章 经典力学基础

(4)Euler动力学方程
犐11ω1+犐12ω2+犐31ω3+(犐33-犐22)ω2ω3+犐23(ω22-ω
23)+(犐31ω2-犐12ω3)ω1 =犕1
犐12ω1+犐22ω2+犐23ω3+(犐11-犐33)ω3ω1+犐31(ω23-ω
21)+(犐12ω3-犐23ω1)ω2 =犕2
犐31ω1+犐23ω2+犐33ω3+(犐22-犐11)ω1ω2+犐12(ω21-ω
22)+(犐23ω1-犐31ω2)ω3 =犕
烅
烄
烆 3
若将转动坐标轴取为刚体的主轴,即
犐23 =犐31 =犐12 =0
则上述方程组成为
犐1dω1d狋+(犐3-犐2)ω2ω3 =犕1
犐2dω2d狋+(犐1-犐3)ω3ω1 =犕2
犐3dω3d狋+(犐2-犐1)ω1ω2 =犕
烅
烄
烆3
式中(犐1,犐2,犐3)为主转动惯量.
(5)刚体角动量和转动动能的张量表示和矩阵表示
① 刚体角动量
犑犽 =犐犽犾ω犾 (犽,犾=1,2,3)
(犑犽)=
犐11 犐12 犐31
犐12 犐22 犐23
犐31 犐23 犐
烄
烆
烌
烎33
ω1
ω2
ω
烄
烆
烌
烎3
② 刚体转动动能
珟犜=1
2犐犽犾ω犽ω犾 =
1
2犑犽ω犽 (犽,犾=1,2,3)
珟犜=1
2(ω1,ω2,ω3)
犐11 犐12 犐31
犐12 犐22 犐23
犐31 犐23 犐
烄
烆
烌
烎33
ω1
ω2
ω
烄
烆
烌
烎3
=1
2(ω1,ω2,ω3)
犑1
犑2
犑
烄
烆
烌
烎3
③ 张量形式的Euler动力学方程
张量形式的Euler动力学方程可以被写成
d犑犽d狋+犲犽犼犻ω犼犑犻 =犕犽 (犻,犼,犽=1,2,3)
若设“主转动惯量”为犐犽,因为
犑犽 =犐犽ω犽 (不对犽求和)
所以,张量形式的Euler动力学方程又可被写成
犐犽dω犽d狋+犲犽犼犻ω犼(ω犻犐犻)=犕犽 (不对犽求和)
3犎狅狅犽犲犖犪狏犻犲狉弹性力学
(1)广义 Hooke定律和Lame关系或YoungPoisson关系
① 广义 Hooke定律
8 经典力学题谱

σ犻犼 =σ犻犼犲( )犽犾 0
犲犽犾 =犪犻犼犽犾犲犽犾
式中
犪犻犼犽犾 =λδ犻犼δ犽犾+μ(δ犻犽δ犼犾+δ犻犾δ犼犽)
若将广义 Hooke定律写成
犲犻犼 =犲犻犼σ( )犽犾 0σ犽犾 =犫犻犼犽犾σ犽犾
则有
犫犻犼犽犾 =1+ν犈
δ犻犽δ犼犾-ν1+ν
δ犻犼δ( )犽犾②Lame关系或YoungPoisson关系
σ犻犼 =λθδ犻犼+2μ犲犻犼
犲犻犼 =-ν犈Θδ犻犼+
1+ν犈σ犻
烅烄
烆 犼
(2)Cauchy方程
犲犻犽 =1
2
狌犻
狓犽+狌犽
狓犻+狌犾
狓犻
狌犾
狓( )犽 (犻,犽,犾=1,2,3)
(3)Navier方程
ρ犳犻+σ犻犼狓犼
=ρ2狌犻
狋2 (犻=1,2,3)
或修正为
ρ2狌犻
狋2 =ρ犳犻+
狓犾δ犻犽 +
狌犻
狓( )犽σ[ ]犽犾 (犻,犽,犾=1,2,3)
(4)Lame方程
ρ2狌犻
狋2 =ρ犳犻+(λ+μ)δ犻犽 +
狌犻
狓( )犽
θ狓犽
+μδ犻犽 +狌犻
狓( )犽δ犼犽 +
狌犼狓( )
犽
2狌犼
狓犾狓犾
+ λθδ犼犽 +μ狌犼狓犽
+狌犽
狓犼+狌犾
狓犼
狌犾
狓( )[ ]犽
2狌犻
狓犼狓犽
当然,也可将“Lame方程”改写为如下形式:
2狌犻
狋2 =犳犻+(犮
2狆 -犮
2狊)δ犻犽 +
狌犻
狓( )犽
θ狓犽
+犮2狊 δ犻犽 +
狌犻
狓( )犽δ犼犽 +
狌犼狓( )
犽
2狌犼
狓犾狓犾
+ (犮2狆 -2犮2狊)θδ犼犽 +犮
2狊狌犼狓犽
+狌犽
狓犼+狌犾
狓犼
狌犾
狓( )[ ]犽
2狌犻
狓犼狓犽
式中犮狆 为纵波波速,犮狊 为横波波速:
犮2狆 =犈(1-ν)
ρ(1+ν)(1-2ν)=λ+2μρ
犮2狊 =犈
2ρ(1+ν)= μ
烅
烄
烆 ρ
(5)线弹性力学的SaintVenant应变相容方程
2犲犼犻
狓犽狓犾+2犲犽犾
狓犼狓犻=2犲犼犾
狓犻狓犽+2犲犻犽
狓犼狓犾 (犼,犻,犽,犾=1,2,3)
“SaintVenant应变相容方程”还可写成如下形式:
9第1章 经典力学基础
犲犼犽犿犲犻狆狇犽狆犲犿狇 =0
(6)线弹性力学的BeltramiMichell应力相容方程
δ犻犼ρν(1-2ν)
犈(1-ν)2
狋2+
1
1+ν
2
狓犻狓[ ]犼Θ-
2ρ(1+ν)
犈
2
狋2-
2
狓犽狓[ ]犽σ犻犼
=-ρδ犻犼ν
1-ν
犳犽
狓犽+犳犻
狓犼+犳犼
狓( )
犻
(7)平面应力问题和平面应变问题的基本微分方程
2(1+ν)ρ犈
2狌α
狋2 -犳( )α = 1+(2-犽)ν
1-犽[ ]
νδαλ+
狌α狓( )
λ
犲γγ狓λ
+ δαλ+狌α狓( )λ
δγλ+狌γ狓( )λ
2狌γ
狓β狓β
+2ν1-犽( )
ν犲γγδβλ+
狌λ狓β+狌β狓λ+狌γ狓β
狌γ狓( )[ ]λ
2狌α
狓β狓λ (α,β,γ,λ=1,2)
而
犲λλ =狌λ狓λ
+1
2
狌β狓( )
λ
狌β狓( )
λ
犽= {12 (对平面应力)
(对平面应变)
(8)Krutkov应力函数张量犽狆,Maxwell应力函数犽,Morera应力函数ψ犽 和Airy应力函数
① Krutkov应力函数张量
σ犻犼 =犲犻犽犿犲犼狆狇犿狇犽狆
犽狆 =狆{
犽
② Maxwell应力函数
(σ犻犽)=
23
狓22
+22
狓23
-23
狓1狓2-22
狓3狓1
-23
狓1狓2
21
狓23
+23
狓21
-21
狓2狓3
-22
狓3狓1-21
狓2狓3
22
狓21
+21
狓
烄
烆
烌
烎22
③ Morera应力函数
(σ犻犽)=
2
ψ1
狓2狓3-1
2
狓3
ψ1
狓1+ψ2
狓2-ψ3
狓( )3
-1
2
狓2
ψ3
狓3+ψ1
狓1-ψ2
狓( )2
-1
2
狓3
ψ1
狓1+ψ2
狓2-ψ3
狓( )3
2
ψ2
狓3狓1-1
2
狓1
ψ2
狓2+ψ3
狓3-ψ1
狓( )1
-1
2
狓2
ψ3
狓3+ψ1
狓1-ψ2
狓( )2
-1
2
狓1
ψ2
狓2+ψ3
狓3-ψ1
狓( )1
2
ψ3
狓1狓
烄
烆
烌
烎2
④ Airy应力函数
σαβ =-2
狓α狓β+2
狓λ狓λδαβ (α,β,λ=1,2)
(9)线弹性静力学的通解
① 线弹性静力学的BoussinesqGalerkin通解为
狌犻 =-犅
狓犻
φ犽
狓( )犽
+2
φ犻
狓犽狓犽
犅=1-犃=λ+μλ+2μ
=1
2(1-ν
烅
烄
烆 )
01 经典力学题谱

其中
2
狓犾狓犾
2
φ犻
狓犽狓犽=
Δ
2
Δ
2
φ犻 =0
② 线弹性静力学的NeuberBabokovich通解为
狌犻 =-犅
狓犻0+
1
2狓犽ψ( )犽 +ψ犻
犅=λ+μλ+2μ
=1
2(1-ν
烅
烄
烆 )
其中
20
狓犽狓犽=
Δ
20 =0
2
ψ犻
狓犽狓犽=
Δ
2
ψ犻 =
烅
烄
烆0
(10)线弹性动力学的通解
① 线弹性动力学的BoussinesqGalerkin型通解为
狌犻 = (犮2狆 -犮
2狊)
狓犻
φ犽
狓( )犽- 犮2狆
2
狓犽狓犽-2
狋( )2 φ犻犮2狆
Δ
2-2
狋( )2 犮2狊
Δ
2-2
狋( )2 φ犻 =0犮2狆 =
λ+2μρ
犮2狊 = μ
烅
烄
烆 ρ
② 线弹性动力学的NeuberBabokovich型通解为
狌犻 = (犮2狆 -犮
2狊)犻-ψ犻(狓犼,狋)
=0+1
2犮狆犮狊狓犽ψ犽
犮狊犮狆狓犼,( )狋
犮2狆
Δ
2-2
狋( )2 0 =0犮2狊
Δ
2-2
狋( )2 ψ犻 =
烅
烄
烆 0
式中
犮2狆 =λ+2μρ
犮2狊 = μ烅
烄
烆 ρ
13 例 题 萃 要
【例11】 已知:质量为犿的质点在曲线上运动,其内秉方程为
11第1章 经典力学基础
犿d狏d狋=犉τ
犿狏2
ρ=犉狀+犖
烅
烄
烆 狀
而且外力是保守力,势能为犞.
求:(1)内秉方程的能量积分;
(2)曲线的参数方程为狓1 =狓1(θ)
狓2 =狓2(θ{ )
时的约束反力(θ为质点运动方向与水平线之间的夹
角),设保守力是重力.
解:(1)因为
狏=d狊d狋
所以
d狏d狋=狏
d狏d狊=1
2
d
d狊(狏2)
于是,内秉方程的能量积分为
1
2犿狏2+犞 =const.
犿狏2
ρ=犉狀+犖
烅
烄
烆 狀
(2)当保守力为重力时,有
1
2犿狏2+犿犵狓2 =0
故
狏2 =-2犵狓2
又因为
犉狀 =-犿犵cosθ
d狊= d狓( )12+ d狓( )2槡
2 ρ=
d狊dθ
所以
犖狀 =犿犵 cosθ-2狓2
d狓1d( )θ
2
+d狓2d( )θ槡
熿
燀
燄
燅
2
图1.1
【例1.2】 已知:质量分别为(犿1,犿2,犿3)的
3 个 质 点, 位 于 犅犪2,犺,( )0 ,犃(犪,0,0) 和
犗(0,0,0)3点(图1.1).
求:(1)各转动惯量和惯量积,并写成矩阵
形式;
(2)当犿2=犿3=1
2犿1,犺=犪时的惯量
主轴和惯量主轴的方向.
21 经典力学题谱

解:(1)因为
犐11 =犿1犺2
犐22 =犿1犪( )2
2
+犿2犪2=犿14+犿( )2 犪2
犐33 =犐11+犐22 =犿1犺2+犿14+犿( )2 犪2
犐23 =0
犐31 =0
犐12 =-1
2犿1
烅
烄
烆犪犺
所以
(犐)=
犿1犺2
-1
2犿1犪犺 0
-1
2犿1犪犺
犿14+犿( )2 犪2 0
0 0 犿1犺2+犿14+犿( )2 犪
烄
烆
烌
烎2
(2)从久期方程中,可解出
犐1,2 =1
4(7± 槡17)犿2犪2
犐3 =7
2犿2犪
烅
烄
烆2
再由久期方程得到
狀2狀1=1- 槡174
狀3 =
烅
烄
烆 0
从而惯量主轴的方向(即犐1,2与狓1轴之间的夹角)分别为arctan1- 槡174
和arctan1+ 槡174
;而犐3
的方向仍然垂直于犗狓1狓2 平面.
【例1.3】 已知:3个质量均为犿的质点分别位于(犪,0,0),(0,犪,2犪),(0,2犪,犪)3点.
求:系统相对于原点犗的主转动惯量.
解:因为
犐11 =犿(犪2+4犪
2)+犿(4犪2+犪2)=10犿犪2
犐22 =犿犪2+犿(4犪2)+犿犪2 =6犿犪2
犐33 =犿犪2+犿犪
2+犿(4犪2)=6犿犪2
犐23 =-犿(2犪2+2犪
2)=-4犿犪2
犐31 =犐12 =
烅
烄
烆 0
所以
(犐)=
10 0 0
0 6 -4
0 -
烄
烆
烌
烎4 6
犿犪2
31第1章 经典力学基础

由于
犐11+犐22+犐33 =22犿犪2
犐22 犐23
犐23 犐33+犐33 犐31
犐31 犐11+犐11 犐12
犐12 犐22=140(犿犪2)2
犐11 犐12 犐31
犐12 犐22 犐23
犐31 犐23 犐33
=200(犿犪2)
烅
烄
烆
3
因此
犐3-22犐2+140犐-200=0
即
(犐-10)2(犐-2)=0
于是
犐1,2 =10犿犪2
犐3 =2犿犪{ 2
【例1.4】 已知:主应变犲1 =犲,犲2 =犲′,且犲≠犲′;犲对应的应变主轴的方向为狀犼,犲′对应的应
变主轴的方向为狀犼′.
求证:狀犼狀犼′=0,即狀犼 垂直于狀犼′.
证:因为
狀犼犲犼犻 =犲狀犼δ犼犻
狀犼′犲犼犻 =犲′狀犼′δ犼{
犻
所以
狀犻′狀犼犲犼犻 =犲狀犻′狀犼δ犼犻 =犲狀犻′狀犻
狀犻狀犼′犲犼犻 =犲′狀犻狀犼′δ犼犻 =犲′狀犻狀犻{ ′
两式相减,得
(犲-犲′)狀犻狀犻′=犲犼犻狀犼狀犻′-犲犼犻狀犼′狀犻
由犲犻犼 的对称性,又有
(犲-犲′)狀犻狀犻′=犲犼犻狀犼狀犻′-犲犻犼狀犼′狀犻
在后一项中将求和指标犻和犼互换,得
(犲-犲′)狀犻狀犻′=犲犼犻(狀犼狀犻′-狀犻′狀犼)=0
由于
犲-犲′≠0
故
狀犼狀犼′=0
【例1.5】 已知:可能的应变状态为
犲11 =犪0+犪1(狓21+狓
22)+(狓
41+狓
42)
犲22 =犫0+犫1(狓21+狓
22)+(狓
41+狓
42)
犲12 =犮0+犮1狓1狓2(狓21+狓
22+犮2)
犲33 =犲23 =犲31 =
烅
烄
烆 0
41 经典力学题谱

求:系数(犪0,犪1,犪2,犫0,犫1,犫2,犮0,犮1,犮2)之间的关系.
解:将已知条件代入“SaintVenant应变相容方程”,可得
犪1+犫1-犮1犮2 =0
犮1 ={
2
【例1.6】 已知:全应力定义为σ(狀)=σ犼犻狀犼狀犻,总面力定义为犜犻=σ犼犻狀犼,式中狀犻为面元的法向
单位矢量;剪应力τ犻由下式定义:
τ2=τ犻τ犻 = (犜犻)
2-σ
2(狀)
另外,应力主轴上的主应力设为(σ1,σ2,σ3).
求:正八面体上剪应力的平方.
解:在正八面体上有
狘狀1狘=狘狀2狘=狘狀3狘
狀犻狀犻 =狀21+狀
22+狀
23 =
{1
所以
狘狀犻狘=1
槡3
由已知条件有
(犜犻)2=1
3(σ21+σ
22+σ
23)
σ(狀)=1
3(σ1+σ2+σ3)
于是
τ2=τ犻τ犻 = (犜犻)
2-σ
2(狀)=
1
9(σ2-σ3)
2+(σ3-σ1)
2+(σ1-σ2)[ ]2
【例1.7】 已知:在线弹性静力学中,应力状态为
σ11 =σ22 =σ33 =σ(狓犻)
σ23 =σ31 =σ12 ={
0
求证:体积力犳犻 =-犞
狓犻(犻=1,2,3),即此体积力是保守力,式中犞 为势能函数.
证:将已知应力状态代入线弹性静力学的基本微分方程,有
σ11
狓1+ρ犳1 =
σ狓1
+ρ犳1 =0
σ22
狓2+ρ犳2 =
σ狓2
+ρ犳2 =0
σ33
狓3+ρ犳3 =
σ狓3
+ρ犳3 =
烅
烄
烆0
从而
犳犻 =-1
ρ
σ狓犻
=-
狓犻
σ( )ρ
可以看出,σ
ρ=犞.
【例1.8】 已知:一长为犾的长杆竖直地置于重力场中.
51第1章 经典力学基础

求:它的形变.
解:设狓3 轴为杆轴的方向,杆下端所在平面为狓1狓2 平面.
应力分量中,除σ33外都应等于零;而在杆的上端(狓3=犾处)有σ33=σ23=σ31=0.从而,可解
出
σ33 =-ρ犵(犾-狓3)
而其余的应力分量皆为零.于是,可算出各应变分量:
犲11 =犲22 =ν犈ρ犵(犾-狓3)
犲33 =-1
犈ρ犵(犾-狓3)
犲23 =犲31 =犲12 =
烅
烄
烆 0
由此积分可得位移分量为
狌1 =ν犈ρ犵(犾-狓3)狓1
狌2 =ν犈ρ犵(犾-狓3)狓2
狌3 =-ρ犵
2犈[犾2-(犾-狓3)
2-ν(狓21+狓
22
烅
烄
烆)]
其中狌3 在狓3 =0处即长杆下端处是不适用的(因为狓1 和狓2 不一定是零).
【例1.9】 已知:半径为犪的实心球处在自身的引力场中.
求:它的形变.
解:将线弹性静力学的基本微分方程写成矢量形式是
Δ
2狌+1
1-2ν
Δ
(
Δ
·狌)=-2(1+ν)
犈 ρ犳
换成球坐标(狉,θ,φ)后,以犳=-犵狉犚代入此式,有
犈(1-ν)(1+ν)(1-2ν)
d
d狉
1
狉2d(狉2狌)
d[ ]狉=ρ犵
狉犚
其定解条件为
狌有界 (狉=0)
σ狉狉 =0 (狉=犪{ )
由此得到
狌=-ρ犵犪(1-2ν)(1+ν)
10犈(1-ν)狉3-ν1+ν
-狉2
犪( )2点题:(1)在半径为犪
3-ν3(1+ν槡 )
的球面内部,犲狉狉 <0(受压);而在其外部,犲狉狉 >0(受拉).
(2)球心压力为3-ν
10(1-ν)ρ犵犪.
【例1.10】 已知:半径为犪的圆柱体以等角速度ω 绕其对称轴旋转.
求:它的形变.
解:将线弹性静力学的基本微分方程写成矢量形式是
61 经典力学题谱

Δ
2狌+1
1-2ν
Δ
(
Δ
·狌)=-2(1+ν)
犈 ρ犳
换成柱坐标(狉,θ,狓3)形式,以圆柱体的对称轴为狓3轴,犳狉=ω2狉.此问题中同样只有径向位移狌狉=
狌(狉).由此可得基本微分方程是
犈(1-ν)(1+ν)(1-2ν)
d
d狉
1
狉d(狉狌)
d[ ]狉=-ρω
2狉
其定解条件为
狌有界 (狉=0)
σ狉狉 =0 (狉=犪{ )
由此解得
狌=ρω2(1+ν)(1-2ν)
8犈(1-ν)狉[(3-2ν)犪2-狉2]
【例1.11】 已知:一个内、外半径分别为犪和犫的空心圆筒,其内壁受有压强狆,而外壁不
受力.
求:它的形变.
解:设空心圆筒的对称轴为狓3 轴.用柱坐标(狉,θ,狓3).此问题中只有径向位移狌狉 =狌(狉).由此
可得基本微分方程是
Δ
·狌=1
狉d(狉狌)
d狉=const.=2犃
解出
狌=犃狉+犅狉
其中(犃,犅)为待定常数.于是可得
狌狉狉 =d狌d狉=犃-
犅
狉2
狌θθ =狌狉=犃+
犅
狉
烅
烄
烆 2
其定解条件为
σ狉狉 =-狆{0
(狉=犪处)
(狉=犫处)
从而求得
犃=(1+ν)(1-2ν)
犈狆犪
2
犫2-犪2
犅=1+ν犈狆(犪犫)
2
犫2-犪
烅
烄
烆 2
点题:其应力分布为
σ狉狉 =狆犪
2
犫2-犪21-犫2
狉( )2σθθ =
狆犪2
犫2-犪21+犫2
狉( )2σ33 =2ν
狆犪2
犫2-犪
烅
烄
烆 2
71第1章 经典力学基础

【例1.12】 已知:一个内、外半径分别为犪和犫的空心球壳,其内壁受有压强狆1,而外壁受有压
强狆2.
求:它的形变.
解:以球心为原点引入球坐标(狉,θ,φ)系.此问题中只有径向位移狌狉 =狌(狉).由此可得
Δ
×狌=0,于是基本微分方程是
Δ
(
Δ
·狌)=0
即
Δ
·狌=1
狉2d(狉2狌)
d狉=const.=3犃
或
狌=犃狉+犅
狉2
其中(犃,犅)为待定常数.由此可得
犲狉狉 =犃-2犅
狉3
犲θθ =犲φφ =犃+犅
狉3
σ狉狉 =犈
(1+ν)(1-2ν)[(1-ν)犲狉狉+2ν犲θθ]=犈
犃1-2ν
-2犅
(1+ν)狉[ ]
烅
烄
烆 3
其定解条件为
σ狉狉 =-狆1 (狉=犪处)
-狆2 (狉=犫处{ )
从而求得
犃=1-2ν犈
狆1犪3-狆2犫
3
犫3-犪( )3
犅=1+ν犈
(狆1-狆2)犪3犫3
犫3-犪[ ]烅
烄
烆 3
于是
σ狉狉 =狆1犪
3-狆2犫
3
犫3-犪( )3 -2(狆1-狆2)犪
3犫3
(犫3-犪3)狉[ ]3
【例1.13】 已知:体积力是保守力,即
ρ犳犻 =-犞
狓犻
式中犞 为势能.
求证:线弹性静力学问题的应力张量可用Airy应力函数表示为
σαβ =-2
狓犪狓β+
2
狓γ狓γ+( )犞 δαβ (α,β,λ=1,2)
并导出相应的相容方程.
证:将已知的σαβ 代入线弹性静力学问题的基本微分方程
σαβ狓β
+ρ犳α =0
81 经典力学题谱

立即可以得到验证.对《经典力学》中的(1.3.59)式进行“缩阶”,有
2Θ
狓犽狓犽=-ρ
1+ν1-ν
犳犽
狓( )犽=1+ν1-ν
2犞
狓犽狓( )
犽
将已知的σαβ 进行“缩阶”后分“平面应变问题”和“平面应力问题”两种情况代入上式,可得
2
狓α狓α
2
狓β狓β=
Δ
2
Δ
2=
-1-2ν1-ν
Δ
2犞 (对平面应变问题)
-(1-ν)
Δ
2犞 (对平面应力问题烅烄
烆 )
【例1.14】 已知:内外半径分别为犪和犫的圆筒,其内外壁分别受有压强狆1和狆2;视此问题为
平面应变问题.
求:它的应力分布.
解:以圆筒的对称轴为狓3轴.平面应变问题用极坐标(狉,θ)表示较为方便.由于问题是对称的,
故与极角θ无关.引入“Airy应力函数”,它所满足的“双调和方程”是
d2
d狉2+1
狉d
d( )狉 d2d狉2+1
狉dd( )狉 =0
其通解为
=犃ln狉+犅狉2ln狉+犆狉
2+犇
其中(犃,犅,犆,犇)为待定常数.于是
σ狉狉 =1
狉dd狉=犃
狉2+犅(2ln狉+1)+2犆
σθθ =d2d狉2
=-犃
狉2+犅(2ln狉+3)+2犆
σ狉θ =
烅
烄
烆 0
而定解条件是
σ狉狉 =-狆1 (狉=犪处)
-狆2 (狉=犫处{ )
σ狉θ 总为零.由定解条件和轴对称性可得
犃=(狆2-狆1)犪
2犫2
犫2-犪2
犅=0
犆=1
2
狆1犪2-狆2犫
2
犫2-犪( )烅
烄
烆 2
从而
σ狉狉 =(狆2-狆1)犪
2犫2
(犫2-犪2)狉2+狆1犪
2-狆2犫
2
犫2-犪2
σθθ =-(狆2-狆1)犪
2犫2
(犫2-犪2)狉2+狆1犪
2-狆2犫
2
犫2-犪
烅
烄
烆 2
因此,可以看出
σ狉狉+σθθ =2狆1犪
2-狆2犫
2
犫2-犪2 =const.
点题:若在平面应力问题中,则
91第1章 经典力学基础
σ33 =-ν犈(σ狉狉+σθθ)=const.
【例犃1】 (1)矢量的分量可表为犃犽.其中下标犽为“自由指标”.
(2)微分算子矢量的分量可表为
狓犽=犽.其中下标犽为“自由指标”.等号右边的形式比等号
左边的形式更简单.
(3)二阶张量可表为犜犼犻.其中下标犻和犼皆为“自由指标”.
(4)二阶张量的“转置”可表为犜犻犼.若将二阶张量理解为矩阵时,则下标犻和犼之间的对换就表
示矩阵的转置.但不是任何张量都能写成矩阵形式的.
(5)矢量“内积”可表为犃犽犅犽.其中犽为“求和指标”.因为此处犽是重复出现的指标.
(6)二阶张量与矢量之间的“内积”可表为犃犽犜犽犾 或犜犾犽犃犽.其中犾为“自由指标”,而犽为“求和
指标”.当然,犃犽犜犽犾 ≠犜犾犽犃犽,即此内积无“交换律”.
(7)两个二阶张量之间的“一次内积”可表为犜犼犽犛犽犾或犛犼犽犜犽犾.其中犼和犾为“自由指标”,而犽为
“求和指标”.当然,犜犼犽犛犽犾 ≠犛犼犽犜犽犾,即此一次内积无“交换律”.
(8)矢量的散度可表为犃犽
狓犽=犽犃犽.其中犽为“求和指标”.
(9)二阶张量的散度可表为犜犽犾
狓犽=犽犜犽犾.其中犽为“求和指标”,而犾为“自由指标”.在有些教
科书中将犽犜犽犾 写成另一种犜犽犾,犽 的形式,本书中不用后一书写方式.
【例犃2】 矢量外积(并矢)
若第一个矢量其新老物理量之间变换关系为
犃犻 =α犻犽犃犽
第二个矢量其新老物理量之间变换关系为
犅犼 =α犼犾犅犾
则这两个矢量的外积
(犃犻犅犼) =犃犻
犅犼 =α犻犽α犼犾犃犽犅犾
是二阶张量.以上运算称为“并矢”.
【例犃3】 经常遇到的Krnecker符号,如
犼狓犻 =狓犻
狓犼=δ犼犻
同理
狓·犻
狓·犼
=δ犼犻
式中狓·犻 =
d狓犻d狋为速度.
【例犃4】 求证:δ犼犻 为二阶张量.
证:由各向同性,有
δ犼犻 =δ犼犻
由正交性,有
δ犼犻 =α犼犽α犻犽
02 经典力学题谱

由替换性,有
α犻犽 =α犻犾δ犽犾
因此
δ犼犻 =α犼犽α犻犾δ犽犾
它符合二阶张量的定义式.所以,δ犼犻 为二阶张量.
【例犃5】 (1)反对称微分算子张量可表为
(犲犻犼犽犽)=
0 3 -2
-3 0 1
2 -1
烄
烆
烌
烎0
(2)矢量的旋度可表为
(
Δ
×犃)犻 =犲犻犼犽犼犃犽
(3)二阶张量的旋度可表为
犲犼犽犾犾犜犽犻
其中“求和指标”犽和犾的前后次序是按习惯排列的.
【例犃6】 (1)二阶张量犃犻犼 的一次缩并为
犃犽犽 =犃11+犃22+犃33+…
(2)三维Krnecker符号的一次缩并为
δ犽犽 =1+1+1=3
(3)Levi-Civita符号的一次缩并为
犲犼犼犽 =0犽 (0犽 是零矢量的分量)
【例犃7】 求证:犲犻犼犽犲犾犿犽 =δ犻犾 δ犼犾
δ犻犿 δ犼犿=δ犻犾δ犼犿 -δ犻犿δ犼犾.
证:利用矢算公式
(犃×犅)×犆= (犃·犆)犅-(犅·犆)犃
因为
(犃×犅)犽 =犲犽犾犿犃犾犅犿
[(犃×犅)×犆]犻 =-犲犻犼犽(犲犽犾犿犃犾犅犿)犆犼 =犲犻犼犽犲犾犿犽犃犿犅犾犆犼
(犃·犆)=犃犿犆犿 =δ犼犿犃犿犆犼
(犅·犆)=犅犾犆犾 =δ犼犾犅犾犆犼
[(犃·犆)犅]犻 = (δ犼犿犃犿犆犼)犅犻 =δ犻犾δ犼犿犃犿犅犾犆犼
[(犅·犆)犃]犻 = (δ犼犾犅犾犆犼)犃犻 =δ犻犿δ犼犾犃犿犅犾犆犼
运算中用到了矢算规则(反向矢乘变号),Krnecker符号的替换性等;注意,“求和指标”不要
重复使用!等号两边的自由指标应该相同!
将这些表达式代入前面的矢算公式,就有
犲犻犼犽犲犾犿犽犃犿犅犾犆犼 = (δ犻犾δ犼犿 -δ犻犿δ犼犾)犃犿犅犾犆犼
所以
[犲犻犼犽犲犾犿犽 -(δ犻犾δ犼犿 -δ犻犿δ犼犾)]犃犿犅犾犆犼 =0
由于犃犿,犅犾,犆犼 不为零,于是有
12第1章 经典力学基础
犲犻犼犽犲犾犿犽 =δ犻犾δ犼犿 -δ犻犿δ犼犾 =δ犻犾 δ犼犾
δ犻犿 δ犼犿
【例犃8】 求:(1)δ犻犽δ犻犽,(2)δ犻犼δ犼犽δ犽犾δ犾犻.
解:首先将其中一个Krnecker符号理解为替换符号,其余理解为“任意”张量;然后一步一
步算.
(1)δ犻犽δ犻犽 =δ犽犽 =3
(2)δ犻犼δ犼犽δ犽犾δ犾犻 =δ犻犼δ犼犽δ犽犻 =δ犻犼δ犼犻 =δ犻犻 =3
【例犃9】已知:犜犻犼 为二阶正交张量.
求证:(1)犜犻犻,(2)犜犻犽犜犽犻,(3)犜犻犼犜犼犽犜犽犻 为标量.
证:(1)犜犻犻 =α犻犽α犻犾犜犽犾 =δ犽犾犜犽犾 =犜犽犽
(2)(犜犻犽犜犽犻) =犜犻犽犜犽犻 = (α犻犼α犽犾犜犼犾)(α犽犿α犻狀犜犿狀)= (α犻犼α犻狀)(α犽犾α犽犿)犜犼犾犜犿狀
=δ犼狀δ犾犿犜犼犾犜犿狀 =犜狀犿犜犿狀
(3)(犜犻犼犜犼犽犜犽犻) =犜犻犼
犜犼犽犜犽犻
= (α犻犾α犼犿犜犾犿)(α犼狀α犽狆犜狀狆)(α犽狇α犻狉犜狇狉)= (α犻犾α犻狉)(α犼犿α犼狀)(α犽狆α犽狇)犜犾犿犜狀狆犜狇狉
=δ犾狉δ犿狀δ狆狇犜犾犿犜狀狆犜狇狉 =犜犾犿犜犿狆犜狆犾
在证明过程中用到了二阶张量的定义,正交性定义以及Krnecker符号的替换性.
【例犃10】 已知:犜犻犼 为二阶正交张量.
求证:犜犻犼犜犼犽 也是二阶张量。
证:用二阶张量的定义,正交性定义,以及Krnecker符号的替换性,有
(犜犻犼犜犼犽) =犜犻犼
犜犼犽 = (α犻犾α犼犿犜犾犿)(α犼狀α犽狆犜狀狆)
=α犻犾(α犼犿α犼狀)α犽狆犜犾犿犜狀狆 =α犻犾δ犿狀α犽狆犜犾犿犜狀狆 =α犻犾α犽狆犜犾犿犜犿狆
它满足二阶张量的定义.
【例犃11】 已知:犜犻犽 为二阶对称张量,犛犻犽 为二阶反对称张量.
求:犜犻犽犛犻犽.
解:根据对称性
犜犻犽 =犜犽犻
根据反对称性
犛犻犽 =-犛犽犻
因此
犜犻犽犛犻犽 =-犜犽犻犛犽犻
由Einstein约定,累加或求和取值相同时,“累加指标”或“求和指标”换用其他文字不影响其累加
或求和,所以将两个“求和指标”犻和犽互换后又有
犜犻犽犛犻犽 =-犜犻犽犛犻犽
从而
犜犻犽犛犻犽 =0
点题:这是一个重要结果,即一个二阶对称张量和另一个二阶反对称张量的二次内积等于零!
【例犃12】 已知:坐标矢量满足关系狓犼 =α犼犻狓犻和α犼犻α犽犻 =δ犼犽,犳为任意物理量.
求:犳狓犼
与 犳
狓犻之间的变换关系.
22 经典力学题谱
解:
犳狓犼
=犳
狓犻
狓犻
狓犼=(α犻犽狓犽)
狓犼
犳
狓犻 =α犻犽
狓犽
狓犼
犳
狓犻
=α犻犽δ犼犽犳
狓犻 =α犻犼
犳
狓犻
即
犳狓犼
=α犻犼犳
狓犻
或
狓犻 =α犼犻
狓犼
点题:本题结果表明,“梯度”算符之间的变换关系与矢量之间的变换关系相同.
【例犃13】 已知:犑犽 为角动量矢量的分量,定义犑犿狀 =犲犿狀犽犑犽.
求:用犑犿狀 表示犑犽 的公式.
解:在定义式两边同时作用犲犿狀犾,注意“求和指标”不要重复使用.有
犲犿狀犾犑犿狀 =犲犿狀犾犲犿狀犽犑犽 =2δ犽犾犑犽 =2犑犾
所以
犑犾 =1
2犲犿狀犾犑犿狀
换“自由指标”后得
犑犽 =1
2犲犿狀犽犑犿狀
14 习 题 解 答
【题1.1】 已知:质点以恒定速率沿一曲线运动.
求证:该质点的速度永远与加速度垂直.
证:因为质点以恒定速率沿一曲线运动,即
狏=const.
所以
狏2 =狏犽狏犽 =const.
于是
d
d狋(狏犽狏犽)=2狏犽
d狏犽d狋=0
或
狏犽犪犽 =0
换言之,该质点的速度狏犽 永远与加速度犪犽 垂直.
32第1章 经典力学基础

点题:同样的方法也可用于证明极坐标系(狉,θ)中单位矢量犲狉 与犲θ 之间的正交
性.因为
犲狉·犲狉 =1
所以
d
dθ(犲狉·犲狉)=0
即
2犲狉·d犲狉dθ=2犲狉·犲θ=0
【题1.2】 已知:质点在平面内运动的切向加速度和法向加速度都是常数.
求证:该质点的运动轨道是对数螺线.
证:设该质点的运动轨道为狉=犳(θ).
因为质点在平面内运动的切向加速度和法向加速度是
犪τ=d狏d狋=d2狉
d狋2
犪狀 =狏2
烅
烄
烆 ρ
而
ρ=d狊dθ=
d狊d狋
θ· =
狏
θ·
所以由狉=犳(θ)有
狏=d狉d狋=θ
·d犳dθ
及
犪狀 =狏2
ρ=θ
·2d犳dθ=犮1
或
θ·
=犮1d犳d( )槡θ
式中犮1 为常数.
于是
犪τ=d狏d狋=θ
·d
dθθ·d犳d( )θ =犮2
即
42 经典力学题谱

犮1d犳d( )槡θ
d
dθ犮1d犳d( )槡( )θ
=犮2
或
d
dθd犳d( )槡( )θ
=犮2犮1
d犳d槡θ
式中犮2 亦为常数.
因而
d d犳d槡( )θ
d犳d槡θ
=犮2犮1dθ
即
lnd犳d槡θ=
犮2犮1θ+犮3
或
d犳dθ=exp2
犮2犮1θ+犮( )[ ]3
从而
狉=犳(θ)=犮12犮2exp2
犮2犮1θ+犮( )[ ]3
式中犮3 也是积分常数.
点题:本题中的d犳dθ可以作为独立的变量一直保留到最后再积分.这是求解本题
的关键所在.有人以为本题缺少条件,其实并不缺少.
【题1.3】 已知:质点的运动轨道方程是狉=犪exp(θ),质点运动时其径向加速
度恒等于零.
求证:质点的运动速率以及加速度的大小都与狉成正比.
证:因为
犪τ=狉̈-狉θ·2
犪θ=狉θ¨+2狉
·θ
烅烄
烆·
而
狉·=犪exp(θ)θ
·
=狉θ·
狉̈=犪exp(θ)θ¨+犪exp(θ)θ
·2=狉θ¨+狉θ
·烅烄
烆2
所以质点运动时其径向加速度恒等于零即犪τ=0,相当于
52第1章 经典力学基础

狉θ¨=0 或 θ
¨=0
于是
犪τ=0
犪θ=狉θ·烅
烄
烆2
即质点的运动加速度的大小与狉成正比.
另外,质点的运动速度为
狏=狉·犲狉+狉θ
·
犲θ=狉θ·
犲狉+狉θ·
犲θ=狉θ·
(犲狉+犲θ)
所以,质点的运动速率的大小也与狉成正比.
点题:本题主要训练读者对质点的运动速率计算公式以及加速度计算公式的了
解.不难.
【题1.4】 已知:质点的运动轨道方程在直角坐标系下是
狓21+狓22 =犪
2
式中犪为常数.
求:(1)此运动轨道方程的自然坐标系表示;
(2)质点运动的切向加速度和法向加速度.
解:(1)在自然坐标系中,
狏=d狊d狋=θ
·d狊dθ
因为在圆轨道中
狏=犪θ·
所以
狊=犪θ
(2)代入
犪τ=d狏d狋
犪狀 =狏2
烅
烄
烆 ρ
便得到
犪τ=犪θ¨
犪狀 =犪θ·烅
烄
烆2
点题:本题主要训练读者对自然坐标系以及质点运动的切向加速度计算公式和
法向加速度计算公式的了解.不难.
【题1.5】 已知:质点的运动轨道方程在自然坐标系下是
狊=犪tanh-1θ
62 经典力学题谱

而且当θ=0时质点通过点(0,犪).
求:此运动轨道的直角坐标系表示.
解:先考虑下列问题,当质点运动的参数方程为
狓1 =犫狋
狓2 =犫cosh{ 狋
时,可证明其轨道的曲率半径是
ρ=狓22犫
因为
狓·1 =犫
狓·2 =犫sinh
烅烄
烆 狋
所以速度的大小是
狏= 狓·21+狓
·
槡22 = 犫2+(犫sinh狋)槡
2=犫cosh狋=狓2
又因为
狓̈1 =0
狓̈2 =犫cosh{ 狋
所以加速度的大小是
犪=狓̈2 =狓2 =犫cosh狋
而切向加速度是
犪τ=d狏d狋=犫sinh狋
因此法向加速度是
犪狀 = 犪2-犪2
槡 τ = (犫cosh狋)2-(犫sinh狋)槡2=犫
由
犪狀 =狏2
ρ
可得
ρ=狏2
犪狀=狓22犫
将此结果用于本题.采用倒过来的证明方法.由
狓2 =犫cosh狓1( )犫
出发,可设
狓1 =犫狊
狓2 =犫cosh{ 狊
72第1章 经典力学基础

式中狊为弧长.于是
d狓1d狊=犫
d狓2d狊=犫sinh
烅
烄
烆狊
或
d狓1d狋=犫狊
·
d狓2d狋=犫狊
·sinh
烅
烄
烆狊
和
d2狓1d狊2
=0
d2狓2d狊2
=犫cosh
烅
烄
烆狊
或
d2狓1d狋2
=狊·d
d狊
d狓1d( )狋 =0
d2狓2d狋2
=狊·d
d狊
d狓2d( )狋 =犫狊
·2cosh
烅
烄
烆狊
因为
狏=狘d狉狘d狋
=狊·狘d狉狘d狊
=狊· d狓1
d( )狊2
+d狓2d( )狊槡
2
=狊·犫2+(犫sinh狊)槡
2
=犫狊·cosh狊
及
犪τ=d狏d狋=狊
·d狏d狊=犫狊
·2sinh狊
犪=d2狓2d狋2
=犫狊·2cosh
烅
烄
烆狊
所以
犪狀 = 犪2-犪2
槡 τ = (犫狊·2cosh狊)2-(犫狊
·2sinh狊)槡2=犫狊
·2
由
犪狀 =狏2
ρ
有
ρ=狏2
犪狀=(犫狊·cosh狊)2
犫狊·2 =犫cosh
2狊
根据
ρ=d狊dθ
有
d狊dθ=犫cosh
2狊
即
d狊
cosh2狊=犫dθ
或
82 经典力学题谱
tanh狊=犫θ
由此得到
狊=tanh-1(犫θ)
令
犫=1
狊→狊烅
烄
烆 犪
就有
狊=犪tanh-1θ
点题:本题有一定难度.主要是对狏、犪和犪τ的物理意义要有清楚的认识;另外,如
何将对时间狋的导数转换成对弧长狊的导数也是解题的关键(在其他习题中,常常需
要将对时间狋的导数转换成对角度θ的导数,方法与此相仿).
【题1.6】 已知:质点的运动轨道方程是心脏线狉=犪(1+cosθ).
求证:(1)质点的径向加速度为常数;
(2)质点的角速度和总加速度的大小都与槡狉成反比.
证:(1)可以用Lagrange力学来处理此问题,从这种处理方法中可以得到用
Newton力学来处理此问题的启发.首先选择将狉=犪(1+cosθ)作为约束条件以减少
自由度,仅用θ作为广义坐标的方法.
因为
狓1 =狉cosθ
狓2 =狉sin{
θ
及
狓·1 =狉
·cosθ-狉θ
·
sinθ
狓·2 =狉
·sinθ+狉θ
·
cos烅烄
烆 θ
所以质点的动能为
犜=1
2犿(狉
·2+狉
2θ·2)=犿犪
2(1+cosθ)θ·2
或者,系统的Lagrangian为
犔=犜=犿犪2(1+cosθ)θ
·2
其对应的运动微分方程为
2(1+cosθ)θ¨-θ
·2sinθ=0
另一方面,系统的Lagrangian也可以写成
犔=犜=犿犪狉θ·2
这时可用Lagrange未定乘数法,设约束方程是
92第1章 经典力学基础





























