Embed Size (px)
Citation preview

1/19/2015
1
Trường Đại học Công nghiệpTp.HCM
Khoa Công nghệ Điện tửBộ môn Điện tử tự động
Bài giảng Đo lường và điều khiển bằngmáy tính
Chương 5: Hệ thống điều khiển sốBiên soạn: ThS. Huỳnh Minh ngọc
ĐT: 0903694384, email: [email protected]
1/19/2015 1
Nội dung chương 5:
• 5.1.Đặc tính của hệ thống điều khiển số.
• 5.2.Bộ điều khiển PID số.
• 5.3. Điều khiển số máy công cụ bằng máy tính (CNC).
• 5.4.Thiết kế các ứng dụng đo lường và điều khiển bằng máy
tính.
1/19/2015 2

1/19/2015
2
5.1. Đặc tính hệ thống điều khiển số
• 5.1.1. Ôn tập Ñieàu khieån hoài tieáp :• 5.1.1.1. Boä ñieàu khieån lieân tuïc vaø boä ñieàu khieån rôøi raïc :• Nhieàu quaù trình coâng nghieäp ñöôïc ñaëc tröng bôûi nhieàu ngoõvaøo vaø ngoõ ra (xem phaàn 2.3.4). Trong nhieàu tröôøng hôïp,tuy nhieân, gheùp noái beân trong laø khoâng ñaùng keå vaø quaù trìnhcoù theå ñöôïc ñieàu khieån bôûi nhieàu boä ñieàu khieån cuïc boä,moät caëp vaøo ra taïi moät thôøi ñieåm. Ñieàu naøy laø caáu truùcthoâng thöôøng trong heä thoáng ñieàu khieån soá tröïc tieáp (DDC-direct digital control). Boä ñieàu khieån PID hay boä ñieàu khieåntöông töï laø laïoi thoâng duïng nhaát, nhö vaäy, noù thì ñaùng giaùñöôïc daønh nhieàu khoâng gian treân hieän thöïc maùy tính cuûaboä ñieàu khieån PID.
1/19/2015 3
• Maùy tính laøm hôïp lí ñeå hieän thöïc caùc caáu truùc ñieàu khieånkhaùc, thí duï, boä ñieàu khieån töï chænh hay phi tuyeán. Vì thamsoá boä ñieàu khieån laø ñöôïc bieát, hieän thöïc cuûa giaûi thuaät ñieàukhieån thì thöôøng suoân seû.Tuy nhieân,moãi hieän thöïc phaûiñöôïc cung caáp vôùi ‘chieác duø an toaøn’ cuûa chöông trình conñeå kieåm tra chaát löôïng cuûa giaûi thuaät ñöôïc choïn.
• 5.1.1.2. Tín hieäu ñöôïc laáy maãu.• Khi chieán löôïc ñieàu khieån hoài tieáp ñöôïc hieän thöïc soá, tínhieäu lieân tuïc töø caûm bieán ñöôïc laáy maãu, haønh ñoäng ñieàukhieån ñöôïc tính toaùn vaø ngoõ ra boä ñieàu khieån ñöôïc göûi thoângqua boä DAC tôùi phaàn töû ñieàu khieån cuoái cuøng (chöông 4 vaø5).
1/19/2015 4

1/19/2015
3
• Tín hieäu ñieàu khieån u(t) thöôøng giöõ laïi khoâng ñoåi trongkhoaûng thôøi gian laáy maãu.Thænh thoaûng tín hieäu ngoõ ra soáñöôïc chuyeån ñoåi thaønh moät chuoãi xung theå hieän söï thay ñoåitrong boä phaän chaáp haønh (truyeàn ñoäng). Van ñieàu khieånñöôïc laùi bôûi ñoäng cô böôùc xung thì thöôøng ñöôïc duøng vôùiboä ñieàu khieån soá.
• Thöïc thi cuûa giaûi thuaät ñieàu khieån laø ñöôïc laùi theo xungclock thoâng thöôøng ñeå maø boä ñieàu khieån phaûi ñöôïc baét ñaàucoù chu kì. Ñieàu naøy khaùc vôùi thöïc thi khoâng ñoàng boä cuûamaïch logic ñöôïc moâ taû trong chöông ñieàu khieån tuaàn töï(PLC). Boä ñieàu khieån taïi thôøi ñieåm ñöôïc tính toaùn, vaø nhövaäy noù khoâng phuø hôïp ñeå yeâu caàu moãi boä ñieàu khieån thöïcthi taïi chính xaùc cuøng moät thôøi ñieåm. Boä ñieàu khieån thöôøngñöôïc thöïc hieän trong maùy tính daønh rieâng gaàn vôùi quaù trìnhvaät lí.
1/19/2015 5
• 5.1.1.3. Boä ñieàu khieån lieân tuïc:• Haøm truyeàn G(s) cuûa heä thoáng ñoäng tuyeán tính ñöôïccñònhnghóa laø tæ soá giöõa bieán ñoåi Laplace cuûa ngoõ ra vaø ngoõ vaøo(xem phaàn 3.3.4)
• Chuùng ta seõ xem xeùt heä thoáng vôùi moat ngoõ vaøo vaø moatngoõ ra.
)(
)()(
sU
sYsG =
1/19/2015 6

1/19/2015
4
5.1.1.3.1.Boä ñieàu khieån ñôn giaûn:Sô ñoà khoái boä ñieàu khieån lieân tuïc
1/19/2015 7
• Neáu H(s)=1 ta coù heä thoáng ñieàu khieån hoài tieáp aâm ñôn vò.• Trong ñoù R(t) laø tín hieäu vaøo, c(t) laø ngoõ ra , vaø e(t) laø saileäch e=r-c*
• G(s) : haøm truyeàn ñoâí töôïng, GBÑK(s): haøm truyeàn boä ñieàukhieån.
• Xeùt heä sau:
1/19/2015 8

1/19/2015
5
1/19/2015 9
1/19/2015 10

1/19/2015
6
• 5.1.1.3.2.Ñieàu khieån ON/OFF• Boä ñieàu khieån on/off laø boä ñieàu khieån hoài tieáp ñôn giaûn, reûtieàn maø ñöôïc duøng cho öùng duïng ñieàu khieån nhieät ñoä(xem hình 2.39). Chuùng coøn ñöôïc duøng trong quaù trình coângnghieäp nhö laø heä thoáng ñieàu khieån möïc chaát loûng. Ñoái vôùiñieàu khieån on/off lí töôûng , ngoõ ra boä ñieàu khieån chæ coù haigiaù trò:
1/19/2015 11
• U=umax nếu e>0
• U=umin nếu e<0 (5)
• Trong ñoù e laø sai soá ngoõ ra (phöông trình 3). Boä ñieàu khieånon/off coù theå ñöôïc hieäu chænh ñeå theâm vaøo moät vuøng cheát(deadband) cho tín hieäu sai soá ñeå giaûm söï nhaïy ñoáivôùinhieãu ño löôøng. Ñieàu khieån on/off cuõng thöôøng xem nhö laøñieàu khieån hai vò trí hay ñieàu khieån bang-bang.
1/19/2015 12

1/19/2015
7
• Boä ñieàu khieån on/off gaây ra dao ñoäng quanh ñieåm ñaëthaèng soá, vì bieán ñieàu khieån nhaûy giöõa hai giaù trò coùtheå. Nhö vaäy noù taïo ra söï hao moøn theâm treân phaàn töûñieàu khieån cuoái cuøng. Neáu moät van ñöôïc duøng nhö boächaáp haønh thì ñieàu naøy laø khuyeát ñieåm ñaùng keå, trongkhi noù khoâng laø ñieåm yeáu neáu phaàn töû laø coâng taécsoâleânoâit (solenoid).
• Moät loaïi cao caáp hôn cuûa ñieàu khieån on/off laø ñöôïcduøng cho ñieàu khieån ñoäng cô (xem phaàn 4.5.5), trongñoù ñoä roäng xung hay loaïi ñieàu cheá khaùc ñöôïc aùp duïngvaøo ñeå chuyeån tín hieäu ñieàu khieån on/off thaønh ñieänaùp ngoõ vaøo ñoäng cô.
1/19/2015 13
5.1.1.3.3.Boä ñieàu khieån PID lieân tuïc
1/19/2015 14

1/19/2015
8
• Tham soá K laø ñoä lôïi boä ñieàu khieån. Ti laø thôøi gian tíchphaân, Td laø thôøi gian vi phaân vaø τ laø bieán tích phaân. Giaù tròu0 laø giaù trò phaân cöïc maø seõ cho boä ñieàu khieån bieân ñoä tínhieäu trung bình hôïp lí.
• Moät soá boä ñieàu khieån,ñaëc bieät laø moâ hình cuõ, coù baêng tæ leä(proportional band) thieát laäp thay cho ñoä lôïi boä ñieàukhieån.Baêng tæ leä (PB) (trong phaàn traêm ,%) ñöôïc ñònh nghóalaø PB=100/K. Ñònh nghóa naøy aùp duïng chæ neáu K khoâng coùchieàu (thöù nguyeân).
1/19/2015 15Bài giảng đo lường và điều khiển bằng máy tính -©Huỳnh Minh Ngọc
1/19/2015 16

1/19/2015
9
1/19/2015 17
5.1.2. Ñaëc tính heä thoáng ñieàu khieån soá
• 5.1.2.1. Đặc tính:• Heä thoáng ñieàu khieån soá voøng kín thöôøng ñöôïc bieåu dieãndöôùi daïng sô ñoà khoái hình sau. Thoâng qua caùc khoùa K(töôïng tröng) laøm vieäc ñoàng boä vôùi chu kyø T, maùy tính ñoïctín hieäu hoài tieáp töø ñoái töôïng ñöôïc ñieàu khieån, so saùnh vôùitín hieäu ñaët trong boä nhôù sau ñoù xöû lyù theo thuaät toaùn ñaõñònh vaø xuaát tín hieäu ñieàu khieån. Tín hieäu ñieàu khieån daïngsoá ñöôïc caøi laïi roài nhôø maïch chuyeån ñoåi DAC ñeán khueáchñaïi coâng suaát.
• Tuøy tröôøng hôïp cuï theå, boä chuyeån ñoåi ADC ñöa tín hieäu töøcaûm bieán vaøo maùy tính coù theå laø vi maïch ADC nhieàu keânh,chuyeån ñoåi VFC, boä ñeám xung ñoïc töø caûm bieán vò tríencoder hay chính laø maïch xöû lyù tín hieäu phöùc taïp coù vi xöûlyù nhuùng beân trong.
1/19/2015 18

1/19/2015
10
• Chuyeån ñoåi DAC coù theå laø vi maïch DAC, hoaëc laø boä chuyeånñoåi soá ra beà roäng xung PWM, soá löôïng xung, taàn soá xung..Khueách ñaïi coâng suaát cuõng raát ña daïng, töø ñôn giaûn laø rôlebaùn daãn SCR, van khí neùn cho ñeán phöùc taïp nhö boä chænhlöu coù ñieàu khieån hay boä bieán taàn tuøy theo ñoái töôïng ñieàukhieån.
1/19/2015 19
1/19/2015 20

1/19/2015
11
• Khoaûng thôøi gian giöõa hai laàn ñoùng khoùa K goïi laø chu kyølaáy maãu Ts :
• TÑ : thôøi gian ñoïc tín hieäu hoài tieáp, phuï thuoäc soá keânhchuyeån ñoåi vaø loaïi chuyeån ñoåi.
• TT : thôøi gian maùy tính xöû lyù tín hieäu ñieàu khieån.• Hieäu soá TS-(TÑ+TT) : laø thôøi gian maùy tính duøng cho caùcthao taùc caàn thieát khaùc.
• TS bò giôùi haïn treân bôûi ñaùp öùng thôøi gian cuûa ñoái töôïng maøta mong muoán.
1/19/2015 21
• Thí duï, ta mong muoán heä thoáng xaùc laäp trong 1 giaây thì roõraøng, theo logic bình thöôøng, ít ra TS phaûi nhoû hôn 0,5 giaây.Caùc tieâu chuaån ñeå choïn TS laø :
• Tr : thôøi taêng mong muoán cuûa ñaïi löôïng ñöôïc ñieàu khieån.• Fmax : baêng thoâng mong muoán cuûa heä kín.• Nhìn chung TS choïn caøng nhoû caøng toát nhöng ñieàu naøy seõdaãn ñeán yeâu caàu laø vaän toác tính toaùn phaûi lôùn vaø thôøi gianchuyeån ñoåi nhoû, taêng giaù thaønh heä thoáng. Tuøy theo ñoáitöôïng ta seõ choïn Ts. Thí duï, vôùi loø nhieät coù theå choïn TS vaøigiaây coøn vôùi ñieàu khieån vò trí laø vaøi ms.
• Vieäc taïo xung nhòp chu kyø TS ñöôïc thöïc hieän nhôø maïch ñònhthì ñeàu ñaën ngaét quaõng cuûa maùy tính.
1/19/2015 22

1/19/2015
12
• Söû duïng maùy tính vaøo ñieàu khieån seõ gaây ra hai vaán ñeà sau :• -Tín hieäu ñieàu khieån bò treã moät thôøi gian sau tín hieäu hoàitieáp, töùc laø ta theâm moät khaâu treã vaøo heä thoáng. Aûnh höôûngcuûa vieäc naøy coù theå coù theå laø quan troïng hay khoâng ñaùng keåtuøy tröôøng hôïp.
• -Söï löôïng töû hoùa tín hieäu coù theå gaây ra sai soá vaø nhieãutrong heä thoáng.
• Vi maïch chuyeån ñoåi ADC thöôøng coù soá bit chuyeån ñoåilaø n=8, 12, 14, 16 vôùi giaù trò moät möùc LSB laø 2-n vaø sai soáchuyeån ñoåi 1 LSB. Vaäy, vôùi ADC nhò phaân n bit ta coù ñoächính xaùc chuyeån ñoåi 100x2-n+1, n=8 sai soá 1% ; n=12 sai soá0,05%.
1/19/2015 23
• taïo n xung moãi voøng quay, giaû söû moãi voøng töông öùng ñoädòch chuyeån daøi l thì sai soá seõ laø l/n. Muoán ñieàu khieån vôùisai soá vò trí côõ µm ta phaûi coù l/n<10-6 ; cho l= 10 mm, thìn>104. Trong caùc maùy CNC thöôøng duøng encoder 20000xung/voøng trôû leân.
1/19/2015 24

1/19/2015
13
• Vieäc tính toaùn trong maùy tính thöïc hieän treân caùc bieán vaøhaèng, haèng laø caùc thoâng soá cuûa heä thoáng caàn ñieàu khieån, tròñaët... Caùch bieåu dieãn soá khi tính toaùn cuõng laø yeáu toá aûnhhöôûng chaát löôïng. Ta thöôøng bieåu dieãn soá döôùi ba daïng :soá nguyeân, soá chaám coá ñònh vaø soá chaám ñoäng.
• Soá nguyeân duøng moät byte, töø hay töø keùp vaø khoâng bieåudieãn ñöôïc soá leû nhöng laø caùch söû duïng phoå bieán cuûa PLC vaøvi xöû lí.
1/19/2015 25
• Soá chaám coá ñònh, daønh moät hoaëc hai byte cho phaàn leû vaømoät töø hay töø keùp daønh cho phaàn nguyeân, nhö vaäy soá seõ coùdaïng xxxxxxxx.xxxx vôùi daáu chaám ñöôïc hieåu ngaàm vaø bitlôùn nhaát bieåu thò daáu. Khi tính toaùn, neáu keát quaû vöôït khungseõ bò caét bôùt gioáng nhö coù moät khaâu baõo hoøa trong khoáiñieàu khieån, phaàn soá leû cuõng ñöôïc laøm troøn. Thöïc ra soá chaámcoá ñònh cuõng khoâng khaùc gì soá nguyeân khi ta qui öôùc ñaëtdaáu chaám tuøy yù. Vôùi yeâu caàu chính xaùc cao, coù theå duøng soáthöïc chaám ñoäng chính xaùc ñôn hay keùp khi coù boä ñoàng xöûlyù toaùn hoïc hay phaàn meàm hoã trôï. Tuy nhieân ta neân nhôùraèng vieäc naøy seõ taêng thôøi gian tính toaùn vaø giaù thaønh leânmoät caùch khoâng caàn thieát khi tín hieäu ñieàu khieån xuaát raDAC coù soá bit giôùi haïn.
1/19/2015 26

1/19/2015
14
• Vi maïch DAC thöôøng laø 10 bit hay 12 bit vôùi ñieän aùp ra10V. Do ñoù, keát quaû tính toaùn seõ bò xeùn ñi phaàn vöôït khung,ñieàu naøy töông öùng vôùi khaâu baõo hoøa. Ngoaøi ra soá möùclöôïng töû giôùi haïn cuõng aûnh höôûng ñeán tín hieäu ñieàu khieånnhö laø moät loaïi nhieãu.
• Giaû söû khoâng duøng vi maïch DAC maø ta bieán ñoåi ra beàroäng xung thì cuõng bò giôùi haïn cuûa boä ñeám /ñònh thì 8 bit hay16 bit.
• Nhö vaäy, aûnh höôûng cuûa khaâu baõo hoøa caàn phaûi ñöôïclöu yù khi thieát keá heä thoáng.
•
1/19/2015 27
5.1.2.2.Laáy maãu tín hieäu lieân tuïc thôøi gian:
• Rôøi raïc hoùa tín hieäu :
•
1/19/2015 28

1/19/2015
15
1/19/2015 29
• Vaán ñeà maát maùt thoâng tin : neáu thì thoâng tin ñöôïc khoâi phuïc troïn veïn. Neáu thì thoâng tin bòmaát maùt.
• Ñònh lyù laáy maãu (Ñònh lyù Shanon) : Tín hieäu x(t) coù phoåtín hieäu giôùi haïn trong khoaûng (-ωmax, ωmax) ñöôïc xaùcñònh hoaøn toaøn töø tín hieäu laáy maãu chæ trong ñieàu kieänneáu taàn soá laáy maãu lôùn hôn 2ωmax. Chæ trong tröôøng hôïpnaøy môùi khoâi phuïc ñöôïc tín hieäu sau khi rôøi raïc hoùa.
• ωs>2ωmax• ωmax laø taàn soá cuûa caùc maét loïc(cao, thaáp..).•
)2/(max sϖϖ <
)2/(max sϖϖ >
1/19/2015 30

1/19/2015
16
• Khoâi phuïc laïi tín hieäu ñaõ bò rôøi raùc hoùa :• Khoâi phuïc laïi tín hieäu ñaõ bò rôøi raùc hoùa : giaû söû ωs>2ωmax. Khoâi phuïc gaàn ñuùng :
• -Noäi suy baäc 0 : keä soá K=const, laáy tín hieäu ñaàu giöõ nguyeân, duøng khaâu ZOH.
• -Noäi suy baäc 1 : tín hieäu seõ coù heä soá K trong moãi moät ñoaïnseõ khaùc nhau.
1/19/2015 31
5.1.2.3.Bieán ñoåi z vaø haøm truyeàn z:
1/19/2015 32

1/19/2015
17
1/19/2015 33
• Thí duï: Laáy maãu heä lieân tuïc vôùi haøm truyeànGp(s)=1/s(s+0,5) duøng maïch giöõ baäc khoâng ZOH vaøT=1sec. Haøm truyeàn Z cuûa heä giöõa ngoõ ra vaø ngoõ vaøo laø :
1/19/2015 34

1/19/2015
18
1/19/2015 35
1/19/2015 36

1/19/2015
19
5.1.2.4.Heä thoáng laáy maãu tín hieäu
1/19/2015 37
1/19/2015 38

1/19/2015
20
Bieâuõ dieãn heä lieân tuïc baèng heä rôøi raïc bieán traïng thaùi :Phöông trình traïng thaùi rôøi raïc cuûa heä lieân tuïc coù treã:
1/19/2015 39
1/19/2015 40

1/19/2015
21
1/19/2015 41
Thí duï: Laáy maãu heä lieân tuïc vôùi haøm truyeàn Gp(s)=1/s(s+1)duøng maïch giöõ baäc khoâng ZOH vaø T=0,1sec.
1/19/2015 42

1/19/2015
22
Vieát phöông trình traïng thaùi rôøi raïc.Khi vieát phöông trình traïng thaùi rôøi raïc, ta khoâng duøng khaâu
ZOH. Heä lieân tuïc :
1/19/2015 43
1/19/2015 44

1/19/2015
23
1/19/2015 45
Vaäy heä phöông trình traïng thaùi rôøi raïc laø :
1/19/2015 46

1/19/2015
24
5.1.2.5.Thuaät toaùn ñieàu khieån.
1/19/2015 47
• Trong ñoù : C(z) : laø haøm truyeàn Z cuûa boä ñieàu khieån soá• G(s) : laø haøm truyeàn ñoái töôïng.• ZOH : laø khaâu giöõ baäc khoâng (D /A).• KDCS : khaâu khueách ñaïi coâng suaát coù ñoä lôïi K vaø thöôøng laøkhaâu phi tuyeán baûo hoaø. Phía tröôùc khaâu ZOH laø khaâu baûohoaø do caét goït soá bit, chu kì laáy maãu laø T.
1/19/2015 48

1/19/2015
25
• Sôû dó khaâu khueách ñaïi coâng suaát laø khaâu baõo hoøa laø docoâng suaát ñöa vaøo ñoái töôïng coù giôùi haïn, ví duï ñieàu khieåncoâng suaát loø nhieät baèng ñieàu roäng xung thì K chæ coù giaù tròtöø 0 ñeán 1.
• Vieäc choïn C(z) thöôøng ñöôïc thöïc hieän theo 2 phöôngphaùp :
• -Tính thuaät toaùn ñieàu khieån C(s) nhö vôùi heä lieân tuïc,khoâng coù ZOH, sau ñoù thay C(s) baèng C(z). Phöông phaùpnaøy ñôn giaûn deã thöïc hieän ñoøi hoûi Ts nhoû ñeå gaàn gioáng heälieân tuïc.
• -Bieán ñoåi ZOH vaø G(s) ra haøm truyeàn z hay phöông trìnhtraïng thaùi rôøi raïc roài duøng coâng cuï lyù thuyeát ñieàu khieån soáñeå tính toaùn tröïc tieáp.
•
1/19/2015 49
5.1.2.6.Biến đổi C(s) ra C(z)
• 5.1.2.6.1.Giôùi thieäu• Coù tình huoáng khi boä ñieàu khieån lieân tuïc thôøi gian ñaõcoù saün.Tröôøng hôïp tieâu bieåu laø khi heä thoáng ñieàu khieåntöông töï ñöôïc thay baèng heä thoáng ñieàu khieån baèng maùytính. Thaät laø töï nhieân coá gaéng thöû chuyeån ñoåi boä ñieàukhieån lieân tuïc vaøo boä ñieàu khieån rôøi raïc tröïc tieáp.Caùch tieáp can thaúng laø duøng thôøi gian laáy maãu ngaénvaø thöïc hieän moat soá xaáp xæ rôøi raïc thôøi gian cuûa boäñieàu khieån lieân tuïc.
1/19/2015 50
1/19/2015
26
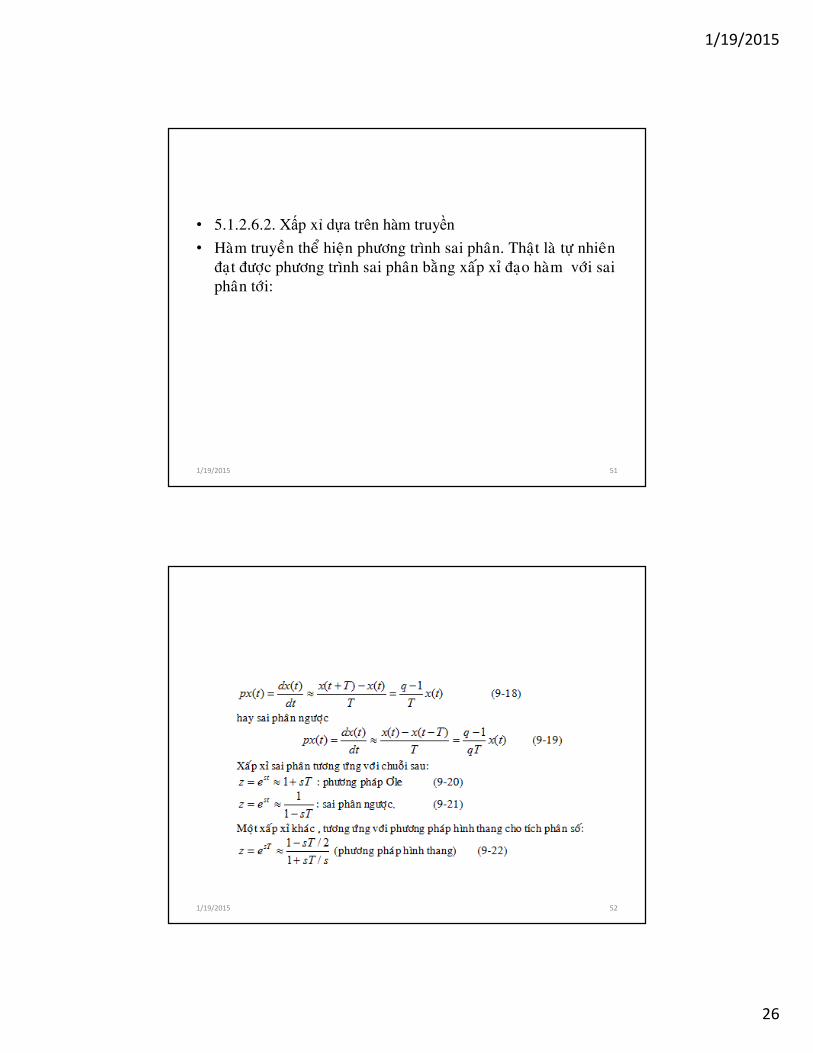
• 5.1.2.6.2. Xấp xỉ dựa trên hàm truyền
• Haøm truyeàn theå hieän phöông trình sai phaân. Thaät laø töï nhieân ñaït ñöôïc phöông trình sai phaân baèng xaáp xæ ñaïo haøm vôùi sai phaân tôùi:
1/19/2015 51
1/19/2015 52

1/19/2015
27
Bieán ñoåi C(s) ra C(z)
Haøm truyeàn töông ñöông cuûa boä ñieàu khieån lieân tuïc
1/19/2015 53
D(s) : haøm truyeàn cuûa boä ñieàu khieån analog.
1/19/2015 54

1/19/2015
28
• Tìm D(z) thay cho D(s) ñeå khoûi maát thôøi gian tình toaùn laïi.• Giaû söû•
• Coù ba phöông phaùp :• -hình chöõ nhaät thuaän• -hình chöõ nhaät ngöôïc• -hình thang(song tuyeán tính).
as
asD
+
=)(
1/19/2015 55
1/19/2015 56

1/19/2015
29
1/19/2015 57
1/19/2015 58

1/19/2015
30
5.2.Thuaät toaùn PID soá
1/19/2015 59
Bieán ñoåi rôøi raïc (s� f(z)): duøng bieán ñoåi ngöôïc , song tuyeántính .
1/19/2015 60

1/19/2015
31
1/19/2015 61
1/19/2015 62

1/19/2015
32
1/19/2015 63
1/19/2015 64
1/19/2015
33
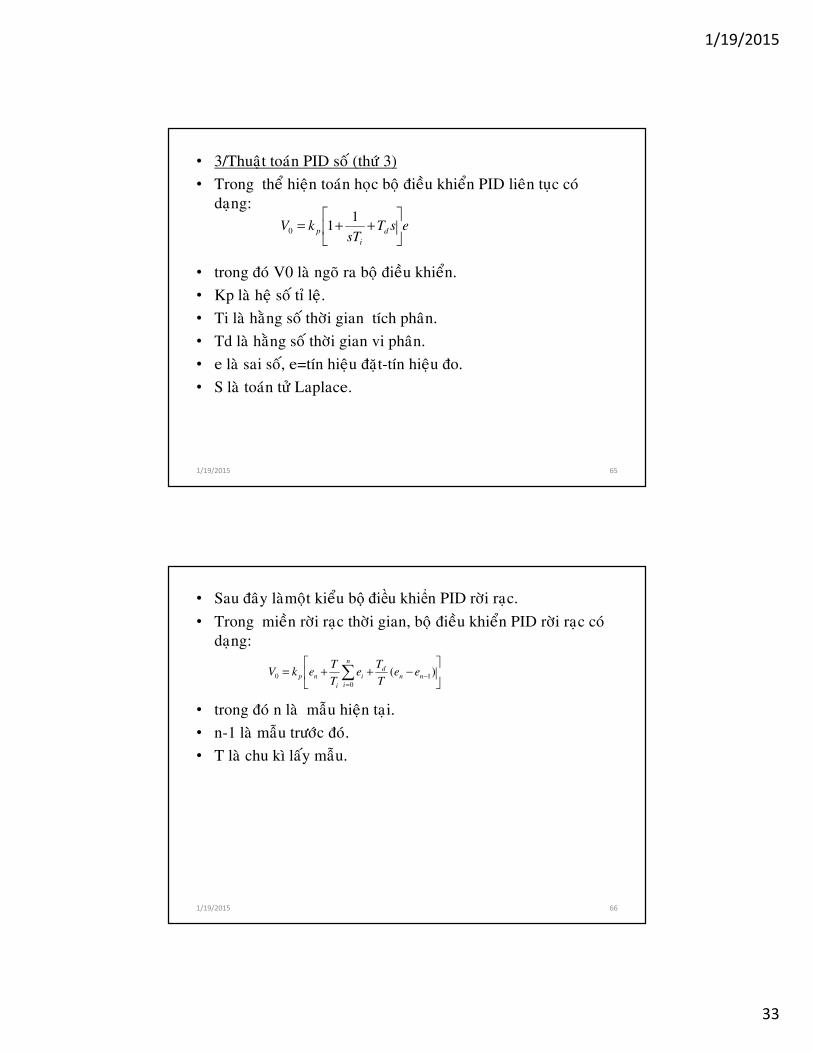
• 3/Thuaät toaùn PID soá (thöù 3)• Trong theå hieän toaùn hoïc boä ñieàu khieån PID lieân tuïc coùdaïng:
• trong ñoù V0 laø ngoõ ra boä ñieàu khieån.• Kp laø heä soá tæ leä.• Ti laø haèng soá thôøi gian tích phaân.• Td laø haèng soá thôøi gian vi phaân.• e laø sai soá, e=tín hieäu ñaët-tín hieäu ño.• S laø toaùn töû Laplace.
1/19/2015 65
esTsT
kV d
i
p
++=
110
• Sau ñaây laømoät kieåu bộ điều khiển PID rôøi raïc.• Trong mieàn rôøi raïc thôøi gian, boä ñieàu khieån PID rôøi raïc coùdaïng:
• trong ñoù n laø maãu hieän taïi.• n-1 laø maãu tröôùc ñoù.• T laø chu kì laáy maãu.
1/19/2015 66
−++= ∑
=
−
n
i
nnd
i
i
np eeT
Te
T
TekV
0
10 )(
1/19/2015
34
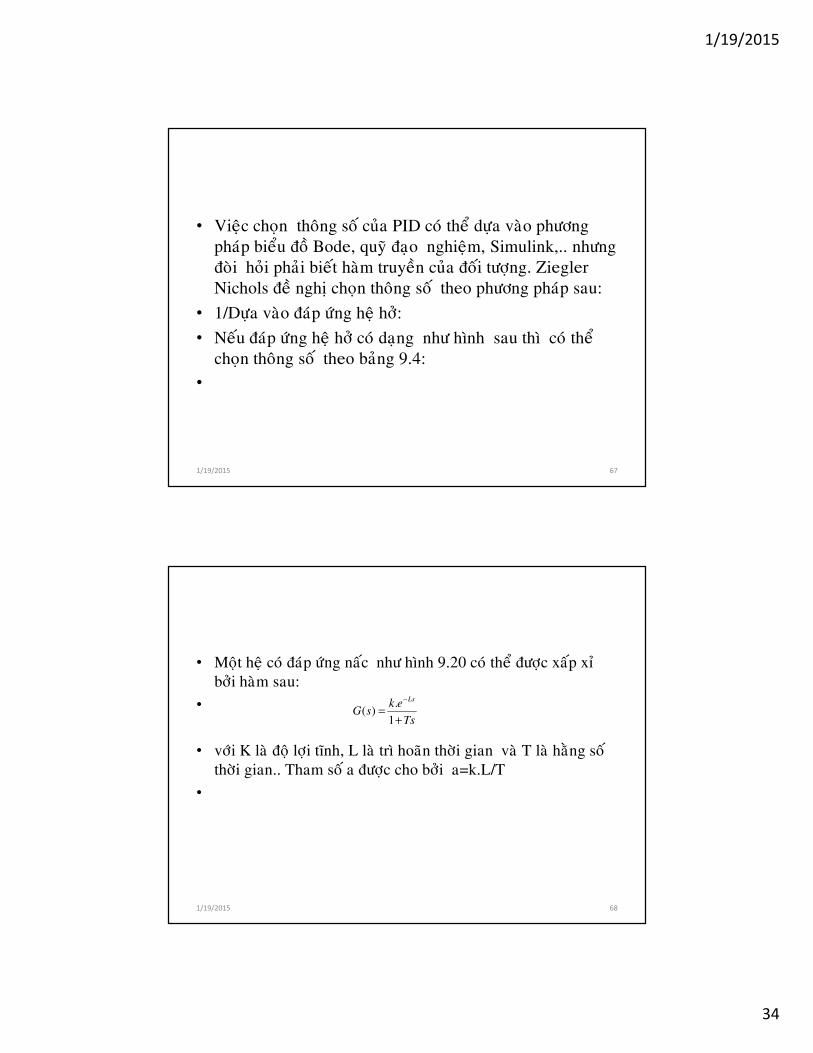
• Vieäc choïn thoâng soá cuûa PID coù theå döïa vaøo phöông phaùp bieåu ñoà Bode, quyõ ñaïo nghieäm, Simulink,.. nhöng ñoøi hoûi phaûi bieát haøm truyeàn cuûa ñoái töôïng. Ziegler Nichols ñeà nghò choïn thoâng soá theo phöông phaùp sau:
• 1/Döïa vaøo ñaùp öùng heä hôû:• Neáu ñaùp öùng heä hôû coù daïng nhö hình sau thì coù theå choïn thoâng soá theo baûng 9.4:
•
1/19/2015 67
• Moät heä coù ñaùp öùng naác nhö hình 9.20 coù theå ñöôïc xaáp xæ bôûi haøm sau:
•
• vôùi K laø ñoä lôïi tónh, L laø trì hoaõn thôøi gian vaø T laø haèng soá thôøi gian.. Tham soá a ñöôïc cho bôûi a=k.L/T
•
Ts
eksG
Ls
+
=
−
1
.)(
1/19/2015 68

1/19/2015
35
1/19/2015 69
1/19/2015 70
1/19/2015
36
AÛnh höôûng cuûa khaâu baõo hoøa
• Thöïc teá tín hieäu ñieàu khieån seõ bò giôùi haïn ôû treân vaø döôùi domaïch DAC hay do giôùi haïn coâng suaát, chaúng haïn neáu tañieàu khieån nhieät ñoä loø ñieän trôû thì tín hieäu ñieàu khieån laøphaàn traêm coâng suaát ñöa vaøo vaø naèm trong khoaûng töø 0 ñeán1, neáu ñieàu khieån vaän toác ñoäng cô moät chieàu thì vaän toáckhoâng theå quaù trò soá toái ña khoâng taûi qui ñònh bôûi nguoàncung caáp.
1/19/2015 71
• Söï baõo hoøa cuûa tín hieäu ñieàu khieån laøm cho ñaùp öùngcuûa heä kín seõ bò keùo daøi, sai soá khoâng ñoåi daáu laøm chothaønh phaàn I seõ tích luõy vöôït troäi so vôùi thaønh phaàn Pvaø D, khi tín hieäu sai leach ñaûo daáu thì phaûi caàn moätthôøi gian môùi giaûm ñöôïc thaønh phaàn I, do ñoù ñaùp öùngra seõ coù voït loá lôùn, hieän töôïng naøy goïi laø windup. Ñeåkhaéc phuïc ta coù theå duøng tích phaân coù ñieàu kieän, banñaàu khi sai leach coøn lôùn ta khoâng duøng I maø chæ duøngP, khi sai leäch nhoû hôn trò ñaõ ñònh ta ñöa thaønh phaàn Ivaøo, tuy nhieân vieäc choïn möùc sai leach cuõng khoângphaûi laø deã daøng. Ta cuõng coù theå laäp trình ñeå tín hieäuñieàu khieån khoâng vöôït quaù giôùi haïn baèng caùch thay ñoåithaønh phaàn I.
1/19/2015 72

1/19/2015
37
• Thí duï: xeùt ñoaïn chöông trình cho ñieàu khieån PI sau:• Ci:=kp*ts/ti;• Er:=yd-y;• It:=it+ci*er; { thaønh phaàn tích phaân}• V:=kp*er+it;
1/19/2015 73
• U:=lim(v,umin,umax); {haøm giôùi haïn u=v giöõa hai giôùihaïn}
• It:=u-v+it; {neáu u trong khoaûng hai giôùi haïn thì it khoângñoåi}
• {neáu u baèng giôùi haïn thay ñoåi it}• Thuaät toaùn choáng windup ñöôïc vieát döôùi daïng:• V(k)=kp*e(k)+ it(k) (1)• It(k+1)=it(k)+er(k)*kp*ts/ti+(u(k)-v(k))ts/tt (2)• Trong ñoù tt-goïi laø thôøi gian tracking.• U(k)-laø tín hieäu ra ñieàu khieån.• U(k)=v: neáu trong khoaûng umin, umax.• U(k) baèng giôùi haïn neáu : v vöôït khung.
1/19/2015 74

1/19/2015
38
• Thí duï: ñieàu khieån loø nhieät coù haøm truyeàn 200exp(-10s)/(1+100s), ta ñieàu khieån coâng suaát baèng phöông phaùpñieàu roäng xung thay ñoåi ton cuûa role baùn daãn vôùi chu kì 2 giaây, loø nhieät coù nhieät ñoä toái ña 200oC, thôøi haèng 100s vaøthôøi treã 10s, theo Ziegler-Nichols boä ñieàu khieån PID coùKp=0,045, TI=30s, duøng chuyeån ñoåi ADC 12 bit, FS 2V vaøkhueách ñaïi chuyeån ñoåi 10 mV/oC, 200 oC seõ öùng vôùi07FFh, ta ñoåi soá nhò phaân ñoïc töø ADC sang thaäp phaânbaèng caùch nhaân vôùi 2000/2048, soá nhaän ñöôïc laø 10 laànnhieät ñoä thöïc, sau khi tính toaùn theo thuaät toaùn ñieàu khieånta chia keát quaû cho 10, soá naøy goïi laø v töông öùng tyû soátON/2; giaû söû löôïng töû 10 bit ta seõ duøng moät boä ñeám 10 bit vôùi taàn soá nhòp 1023/2 Hz, nhaân v vôùi 1023 vaø laáy phaànnguyeân ta seõ ñöôïc soá töø 0 ñeán 1023 duøng ñieàu khieån boäñeám taïo xung chu kyø 2s vaø beà roäng töø 0 ñeán 2s ñieàu khieånSSR. Duøng Simulink cuûa Matlab khaûo saùt ta ñöôïc keát quaûsau, khoâng coù khaâu giôùi haïn (H1).
1/19/2015 75
1/19/2015 76

1/19/2015
39
5.3 Ñieàu khieån soá baèng maùy tính CNC
• 5.3.1.Tổng quan về NC : • -Sự phaùt triển của NC :
• NC (numerical control) laø daïng ñaëc bieät cuûa töï ñoäng hoùa. Cuï theå, coâng cuï maùy töï ñoäng ñöôïc laäp trình ñeå thöïc hieän moät chuoãi söï kieän saép ñaët ôû moät toác ñoä xaùc ñònh tröôùc ñeå taïo ra maãu vôùi keát quaû mong muoán vaø thoâng soá vaät lí.
• -Truïc NC
• Maùy coäng cuï goàm toå hôïp caû truïc tuyeán tính vaø quay. Ñeå ñieàu khieån caùc truïc naøy, moãi NC caàn :
• .Heä thoáng ño –daãn ñöôøng ñieän töû.• . Heä thoáng truyeàn coù theå ñieàu khieån ñöôïc baèng soá.
1/19/2015 77
• -Phần cứng
• Phaàn cöùng taïo neân CNC bao goàm coù boä vi xöû lí (16/32 bit) vaø maïch tích hôïp(IC). Moät soá ñieàu khieån tích hôïp vi maïch VLSI ñeå ñaùp öùng nhu caàu cuï theå cuûa khaùch haøng vaø giaû thieát chuùng ñöôïc yeâu caàu vôùi soá löôïng lôùn. CHuùng yeâu caàu goïn nheï, tin caäy vaø deã baûo trì. Ngoaøi boä vi xöû lí, CNC coøn coù moñun boä nhôù ñieän töû, moät boä phaän quan troïng.
1/19/2015 78

1/19/2015
40
• -Phần mềm• Boä ñieàu khieån NC hieän ñaïi ñöôïc xem nhö laø maùytính chuyeân duïng cho ñieàu khieån maùy coâng cuï hayrobot. Gioáng nhö maùy tính , NC caàn heä ñieàu haønh ,phaàn meàm heä thoáng. Phaàn meàm ñöôïc thieát keá cho maùycuï theå ñeå ñieàu khieån, bôûi vì ñoäng hoïc vaø tính chaát laømvieäc chung cuûa moãi maùy laø duy nhaát. Phaàn meàm ñieàukhieån taát caû chöùc naêng cuûa maùy vaø hieäu quaû hoaït ñoängvaø quaûn lí taát caû laäp trình cuïc boä ôû maùy coâng cuï vaø moâphoûng ñoà hoïa cuûa quaù trình caétt neáu coù theå.
• Boä ñieàu khieån hieän taïi tích hôïp ngoân ngöõ laäp trìnhgioáng PASCAL hay BASIC.
1/19/2015 79
• -Chế ñộ ñiều khiển
• . Ñieàu khieån ñieåm-ñieåm.• .Ñieàu khieån ñöôøng thaúng.• .Ñieàu khieån theo hai truïc.• .Ñieàu khieån theo ba truïc.• -Loại nội suy
• . Noäi suy tuyeán tính.• . Noäi suy voøng troøn.• . Noäi suy parabol.• . Noäi suy spline.• -Laøm việc với bộ đñiều khiển maùy NC
1/19/2015 80

1/19/2015
41
• -Chương trình từng phần.• .Khuoân maãu chöông trình: • Thí duï cuûa moät khoái chöông trình cho hoaït ñoäng ñieàu khieånñöôøng ñi lieân tuïc 3 truïc:
• N4, G2, X±43, Y± 43, Z± 43, I4.3, J4.3, K4.3, F7, S4, T2, M2, $.
• . Haøm chieàu vaø phuï.• .Chieàu taêng vaø tuyeät ñoái.• -Thiết bị nhập dữ liệu• .Ñaàu ñoïc baêng.
1/19/2015 81
• .Baøn phím.• .Caùt-xeùt baêng töø.• . Ñóa töø.• . Ñieàu khieån soá tröïc tieáp DNC.• . Phöông phaùp daïy.• . Giao tieáp.• -Hiển thị trực quan
1/19/2015 82

1/19/2015
42
Hình 5.21: Giao tieáp tieâu bieåu cuûa maùy CNC hieän ñaïi
1/19/2015 83
5.3.2.Điều khiển số bằng maùy tính CNC-Từ NC ñến CNC
CNC (Computer Numerical Control) laø NC keát hôïp vôùi maùy vi tính .
1/19/2015 84

1/19/2015
43
Hình 5.22. So saùnh giöõa NC/CNC. Theâm vaøo chöùc naêng ñieàukhieån thuaàn tuùy, CNC coù khaû naêng haøm môû roäng
1/19/2015 85
• Tuy nhieân maùy CNC hieän ñaïi laø khaùi nieämñieàu khieån môùi hoaøn toaøn (hình 5.23)
1/19/2015 86

1/19/2015
44
Hình 5.23 : Phaùt trieån töø ñieàu khieån phaàn cöùng tôùi phaàn meàm.
1/19/2015 87
Hình ảnh cho CNC machine of Festo
1/19/2015 88

1/19/2015
45
• -Thiết kế bộ ñiều khiển
• Khi nhaø saûn xuaát CNC phaùt trieån moät ñieàu khieån môùi, coângvieäc ñaàu tieân vaø quan troïng nhaát laø phaân chia chöùc naênggiöõa phaàn cöùng vaø phaàn meàm trong moät caùch ñeå ñaït ñöôïcyeâu caàu coù theå toát nhaát giöõa yeâu caàu sau:
• . Giaù thaønh thaáp.• .Thieát keá goïn.• . Tính linh hoïat.• .Xöû lyù toác ñoä cao.• . Khaû naêng môû roäng vaø thích nghi.• . Ñeã hoaït ñoäng vaø baûo trì.
1/19/2015 89
• Tuøy thuoäc vaøo söï quan troïng ñöa ra (ñieàu khieån môùi) haitieáp can CNC khaùc nhau laø :
• 1/ CNC laép raùp baûng goïn nheï, duy nhaát, reû tieàn, saûn xuaátbaèng soá löôïng, vôùi khaû naêng môû roäng giôùi haïn.
• 2/ Heä thoáng CNC coù theå môû roäng, ñaét tieàn, tôùi môû roäng laäptrình raát lôùn maø khoâng coù thoâng minh beân ngoaøi. Boä nhôù : EPROM, RAM, Bubble memory.
1/19/2015 90

1/19/2015
46
• -Maùy vi tính vaø NC
• Theo caùc nhieäm vuï coå ñieån ñieàu khieån di chuyeåntöông ñoái giöõa coâng cuï vaø maãu saûn phaåm, phaïm vi chöùcnaêng hoaït ñoäng so vôùi NC tröôùc ñaây, ñaõ coù môû roäng tínhnaêng CNC tieâu bieåu:
• .Maøn hình hieån thò taùc vuï vaø chaån ñoaùn.• . Boä nhôù chöông trình cho nhieàu chöông trình.• .Khaû naêng soaïn chöông trình ôû maùy coâng cuï.• .Ngoõ ra chöông trình tôùi boä nhôù ngoaøi.• . Hoaït ñoäng maùy coâng cuï thoâng qua ñoái thoaïi.• . Chöùc naêng baûo maät ñöôïc taêng cöôøng.
1/19/2015 91
• -Giải phaùp cho vấn ñề CNC tieâu bieåu
• 1/Loãi ñoïc• 2/Ño löôøng daãn ñöôøng laäp trình sai.• 3/Veát caét ñeå laïi do loãi ñoïc.• 4/Toác ñoä naïp quaù cao.• 5/Thay ñoåi truïc.• 6/Ngoõ vaøo cuûa giaù trò buø coâng cuï.• 7/Ñoä chính xaùc.• 8/Ñöôøng daãn hoaït ñoäng.• 9/Söûa chöông trình vaø soaïn thaûo.• 10/Pocket milling.
1/19/2015 92
1/19/2015
47
• 11/Buø cheùo ngöôïc .• 12/ Heä soá môû roäng.• 13/Khôûi ñoäng laïi veát caét treân profile coâng vieäc.• 14/Ño löôøng töï ñoäng.• 15/Chia nhoû cuûa phaàn giöõ coâng cuï.• 16/Quaûn lí cuûa coâng cuï chò em.• 17/Xaùc ñònh chieàu daøi coâng cuï töï ñoäng.• 18/Naïp choàng CNC baûng hoaït ñoäng.• 19/Laäp trình vôùi söï trôï giuùp cuûa maøn hình hieån thò.• 20/Doø loãi vaø phaân tích.• 21/Machining of sloping surface.• 22/ Ñieàu khieån truïc NC buø.• 23/Thôøi gian chu kì khoái döõ lieäu.
1/19/2015 93
• Giôùi thieäu maùy NC vaø CNC:• -Ñôn vò ñieàu khieån cho maùy ñieàu khieån soá NC, SINUMERIK 805.
• -Maùy CNC ñôøi môùi cuûa GE fanuc automation series 18,2 likích côõ maùy tính xaùch tay coù boä ñieàu khieån CNC 32 bit lieànkhoái vôùi maøn hình LCD maøu 10”, vaø baøn phím, cho pheùpñieàu khieån taùm truïc trong ñoù boán truïc ñoàng thôøi. Chöôngtrình coù theå ñöa vaøo qua card nhôù PCMcia, ngoaøi ra coøn coùmoät maùy tính Pentium gaén lieàn vôùi boä ñieàu khieån kích côõtheû tín duïng. Coù theå noái vôùi maùy tính beân ngoaøi qua USB hay COM.
• -Máy CNC của hãng Festo.
1/19/2015 94

1/19/2015
48
5.4. Thiết kế các ứng dụng đo lường vàđiều khiển bằng máy tính
• 5.4.1.Heä thoáng thu thaäp döõ lieäu nhieàu keânhdùng vi điều khiển P89V51RB2 giao tiếp máy
tính qua cổng nối tiếp:
1/19/2015 95
SƠ đồ khối
1/19/2015 96
1/19/2015
49
Giải thích nguyên lý từng khối
• Máy tính(PC):
• Dùng ngôn ngữ lập trình Visual Basic 6.0 làm phương tiệngiao tiếp. Nhiệm vụ của Visual Basic 6 là:
• _ Tạo giao diện người dùng để giao tiếp với người sử dụng. Trên đó cho phép thay đổi giá trị nhiệt độ yêu cầu, thay đổibộ thông số PID, vẽ đồ thị biểu diễn đáp ứng của hệ thống.
• _Thiết lập giao tiếp với khối Vi điều khiển qua cổng nối tiếpRS – 232.
• _ Lấy giá trị đo nhiệt đo thực tế do khối vi điều khiển truyềnvề để xử lý.
• _ Từ giá trị đo nhiệt độ thực tế, gửi lệnh xuống vi xử lý đểthực hiện việc điều khiển đóng/mở (on/off) lò, hay thựchiện thuật toán PID xuất giá trị độ rộng xung về khối Vi xửlý để điều khiển.
1/19/2015 97
• Vi điều khiển :
• Dùng ngôn ngữ lập trình hợp ngữ 8051 để lập trình cho Vi điều khiển 89V51RB2. Nhiệm vụ của khối vi điều khiển là:
• _Thiết lập giao tiếp với máy tính qua cổng giao tiếp nốitiếp.
• _Thực hiện việc lấy nhiệt độ thực tế của lò nhiệt từ bộchuyển đổi ADC và truyền giá trị này về cho khối máy tínhđể xử lý.
• _Xuất giá trị ra bộ chuyển đổi DAC để điều khiển việcđóng/mở lò nhiệt.
• – Thực hiện thuật toán điều chế độ rộng xung (PWM), xuấtxung PWM và xung điều khiển nhiệt độ của lò nhiệt chokhối công suất. Giá trị độ rộng xung nhận được từ khối máytính.
1/19/2015 98

1/19/2015
50
• Mạch công suất: nhiệm vụ của khối này là:
• _Khuếch đại công suất từ tín hiệu điều khiển do khối vi
điều khiển truyền tới để điều khiển lò nhiệt.
• Bộ chuyển đổi ADC : Do các tín hiệu đầu ra của cảm
biến là các tín hiệu tương tự không thích hợp để đưa vào
các mạch số để xử lý. Vì thế cần phải có mạch ADC đểchuyển đổi từ tương tự sang số để các vi mạch số có thểhiểu và xử lý được.
• Bộ chuyển đổi DAC: Dùng chuyển đổi từ tín hiệu sốsang tương tự để điều khiển.
1/19/2015 99
• Max 232: Max-232 dùng để giao tiếp giữa máy tính và vi
điều khiển
• Cảm biến: để thu thập các giá trị của các đại lượng vật lý của
môi trường bên ngoài.
• Mạch khuyếch đại và điều chỉnh: do giá trị của đầu ra các
cảm biến thường nhỏ so với bộ chuyển đổi ADC của hệ thống
vì thế cần có mạch khuyếch đại và chuyển đổi cho thích hợp
với các mạch chuyển đổi.
1/19/2015 100

1/19/2015
51
Thiết kế chi tiếtKhối nguồn.
1/19/2015 101
• _Biến điện áp ngõ vào AC thành điện áp DC khi qua cầu
điode
• _IC 7812/IC7912 là IC ổn áp ngõ ra 12v/-12v cung cấp
điện áp cho các Opamp hoạt động.
• _IC 7805 và thành điện áp ngõ ra 5V cung cấp cho vi điều
khiển và khối giao tiếp với máy tính.
• _Các tụ lọc trước và sau IC ổn áp nhằm lọc các tần số cao
do các mạch điều khiển và nguồn gây ra giúp cho điện áp
ngõ ra ổn định.
1/19/2015 102
1/19/2015
52
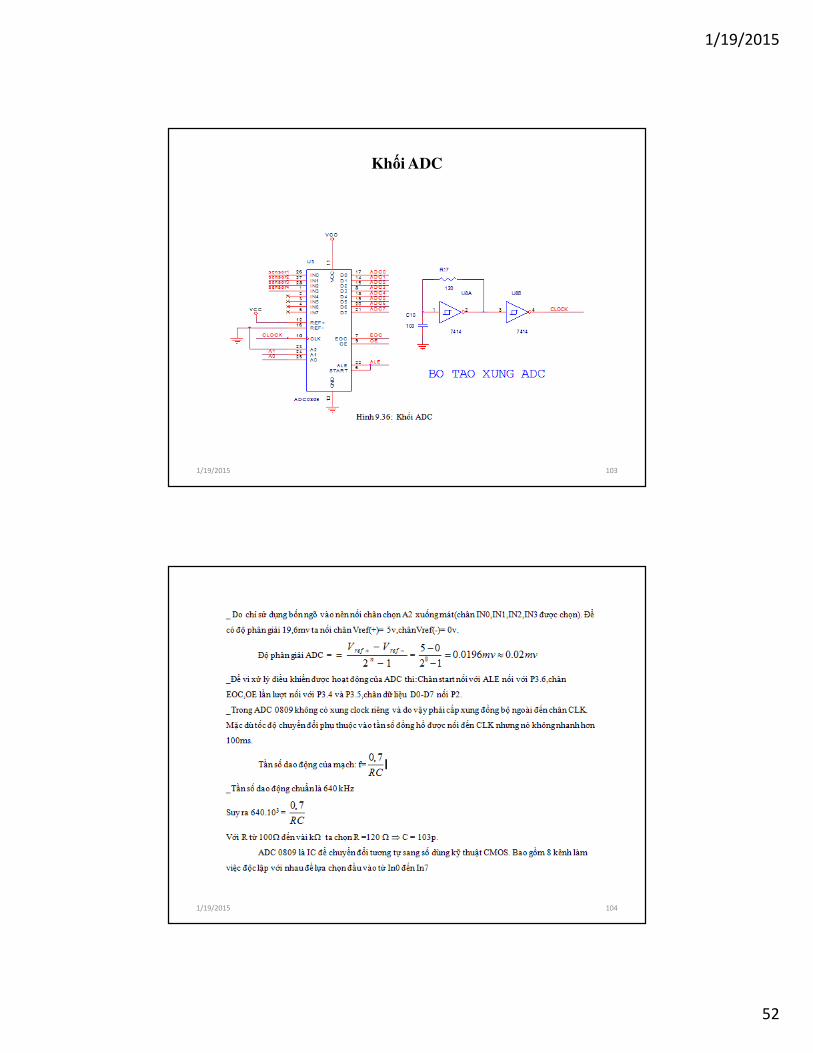
Khối ADC
1/19/2015 103
1/19/2015 104
1/19/2015
53
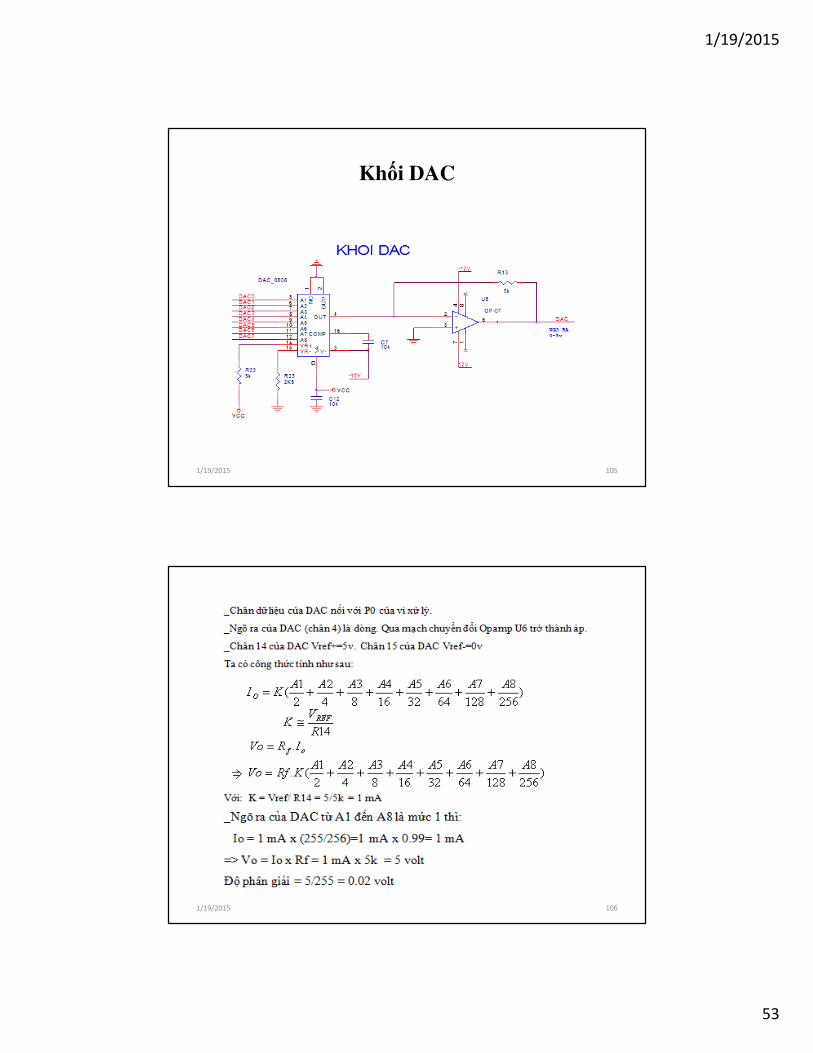
Khối DAC
1/19/2015 105
1/19/2015 106

1/19/2015
54
Khối cảm biến nhiệtCảm biến LM35
1/19/2015 107
1/19/2015 108

1/19/2015
55
khối cảm biến nhiệt PT100
1/19/2015 109
1/19/2015 110

1/19/2015
56
Khối giao tiếp PC
1/19/2015 111
• Sử dụng IC MAX232 để giao tiếp. Nhiệm vụ của IC MAX232
là đảo điện áp ngõ vào (cổng RS–232 sử dụng mức logic âm,
mức 1 ứng với từ –3V đến –15V, mức 0 ứng với từ 3V đến
15V) từ Cổng Com cho vi điều khiển và đảo điện áp điều
khiển từ vi điều khiển đến cổng Com.
1/19/2015 112

1/19/2015
57
Khối công suất
1/19/2015 113
• _Chân SEL điều khiển đóng ngắt cho hay không cho Moc3020
hoạt động. Khi điện áp vào chân 1 của Moc3020 ,nếu mức 1
thì led phát sẽ sáng và làm cho led thu có tín hiệu,dẫn và kích
chân G của triac làm cho điện AC qua tải . Ngược lại mức 0
vào chân 1 thì led thu không có tín hiệu và triac không được
kích, dòng điện không qua tải.
1/19/2015 114

1/19/2015
58
Khối điều khiển quạt
1/19/2015 115
• _Khi kích mức 1 vào Q2 thì LED sáng và quạt hoạt động.
Ngược lại khi kích mức 0 thì led tắt và quạt ngừng hoạt động.
• _Điện trở R44 là điện trở kéo lên. Điện trở R46 hạn dòng bảo
vệ Q2.
• _Diode D7 dập dòng cảm ứng sinh ra do quạt hoạt động đểbảo vệ mạch điều khiển.
1/19/2015 116

1/19/2015
59
• Nguyên lý hoạt động của hệ thống thu thập dữ liệunhiều kênh
• Trên máy tính, ta đặt nhiệt độ của ba lò nhiệt sau đóbấm start để hệ thống bắt đầu hoạt động. Khi đó ba lònhiệt bắt đầu hoạt động làm nhiệt độ của ba lò tăng lên,các cảm biến nhiệt sẽ đọc nhiệt độ của ba lò nhiệt, sau đóthông qua bộ biến đổi ADC để biến đổi tín hiệu tương tựthành tín hiệu số,vi xử lý sẽ đọc các dữ liệu đó và gửi lênmáy tính. Máy tính sẽ hiển thị nhiệt độ của ba lò nhiệttrên màn hính, vẽ đáp ứng của ba lò nhiệt đó, chứa nhiệtđộ thu được vào một file access. Máy tính gửi mã điềukhiển xuống vi xử lý để điểu khiển nhiệt độ của ba lònhiệt như mong muốn.
•
•
1/19/2015 117
5.4.2.Ño vaø ñieàu khieån nhieät ñoä duøng maùy tính PCCard giao tieáp caém vaøo raõnh caém ISA cuûa maùy tính
Pentium 2
1/19/2015 118

1/19/2015
60
Sô ñoà maïch :
1/19/2015 119
Giaûi thuaät :
1/19/2015 120

1/19/2015
61
5.4.3.Heä thoáng ñieàu khieån duøng vi xöû lí.5.4.3.1. Hệ thống điều khiển nhiệt độ
1/19/2015 121
1/19/2015 122

1/19/2015
62
• Giải thích nguyên lý từng khối
• Cảm biến để thu thập các giá trị của các đại lượng vật lý của
môi trường.
• Các mạch khuyếch đại và điều chỉnh: do giá trị của đầu ra các
cảm biến thường nhỏ so với bộ chuyển đổi ADC của hệ thống
vì thế cần có mạch khuyếch đại và chuyển đổi cho thích hợp
với các mạch chuyển đổi.
1/19/2015 123
• Mạch chuyển đổi ADC: do các tín hiệu đầu ra của cảmbiến là các tín hiệu tương tự không thích hợp để đưa vàocác mạch số để xử lý. Vì thế cần phải có mạch ADC đểchuyển đổi từ tương tự sang số để các vi mạch số có thểhiểu và xử lý được.
• Vi điều khiển: bởi vì các thông tin về môi trường ta thuthập được sau khi được mã hoá thành các tín hiệu số cầnphải được chuyển về máy tính để xử lý. Đồng thời cáclệnh mà máy tính đưa ra cũng không thể trực tiếp tácđộng tới đối tượng điều khiển cần thiết. Vì thế phải cómột mạch trung gian làm những việc này.
1/19/2015 124

1/19/2015
63
• Khối hiển thị LCD dùng để hiển thị nhiệt độ đo và nhiệt độ càiđặt lên LCD
• Khối chấp hành: dùng để đóng mở lò, quạt.
1/19/2015 125
Sơ đồ nguyên lý
1/19/2015 126

1/19/2015
64
Thiết kế chi tiếtKhối nguồn
1/19/2015 127
• Nguồi cấp 12VDC để cho quạt hoạt động, IC LM7805 cấp
nguồn 5V cho khối vi xử lý và các IC khác hoạt động. Nguồn
–VCC cung cấp cho OP-07 hoạt động
1/19/2015 128

1/19/2015
65
Khồi cảm biến nhiệt
1/19/2015 129
• Thiết kế: • Gọi điện áp ngõ vào không đảo của U6 là Vi1• Gọi điện áp ngõ vào đảo của U6 là Vi2• Điện áp ngõ ra U6 là V0• V0=V01+V02• V01= -R9*Vi1/R11• V02=(1+R9/R11)*Vi2*(R14/(R14+R13))• V0=(R9/R11)*(Vi2-Vi1)• Ta có độ phân dãi ADC là 0,0196• Chọn R9/R11 = 39,2 = 2 lần độ phân dãi ADC• Ứng với nguồn 5 V thì ADC có độ phân dãi là
5/255=0.0196V
1/19/2015 130

1/19/2015
66
• Tiến hành cân chỉnh
• Nhúng cảm biến vào nước đá vừa tan, chỉnh VR1 sao cho điện áp ra là 2,73V, chỉnh VR2 sao cho điện áp ra là 2.73 + 0.01 x ToC
1/19/2015 131
Khối ADC
1/19/2015 132

1/19/2015
67
• Do chỉ sử dụng hai ngõ vào nên nối các chân chọn A2, A1 xuống mát. Để có độ phân giải 19,6mv ta nối chânVref(+)=5v,chân Vref(-)=0v.
• Để vi xử lý điều khiển được hoạt động của ADC thì: Chân start nối với ALE nối với P3.6, OE lần lượt nối với VCC, ADC0 nối vớibít P3.7, chân dữ liệu D0-D7 nối P0.
1/19/2015 133
Khối chấp hành
1/19/2015 134
1/19/2015
68
• DK0 được nối với P1.3, DK được nối với chân p1.4. được điềukhiển ở mức thấp
• Khi tín hiệu ở mức thấp kích PC817 dẫn mạnh làm Rowle đóng
1/19/2015 135
LƯU ĐỒ GIẢI THUẬT VÀ CHƯƠNG TRÌNH
• Giai thuat chinh
• Giai thuat ADC
• Giai thuat dieu khien LCD
1/19/2015 136

1/19/2015
69
CHƯƠNG TRÌNH
• ;Ñoà aùn 2 : Hệ thống ñiều khiển nhiệt ñộ loø ñieän duøng vi xöû lí AT89C51• ;GVHD : Huyønh Minh Ngoïc• ;SVTH : Tröông Coâng Trung, MSSV : 06134341, CÑÑT8A• ;Thaùng 6-2009.• $MOD51• ORG 00• ; CHUONG TRINH DIEU KHIEN QUAT VA LO NHIET• ; NHIET DO LO > NHIET DO CAI DAT => MO QUAT + TAT LO NHIET• ; NHIET DO LO < NHIET DO CAI DAT => MO LO NHIET + TAT QUAT• ; NHIET DO LO DOC VE THONG QUA IC CAM BIEN NHIET LM335• ; VA DUOC KHUYECH DAI 4 LAN, CHUYEN TU AP SANG SO NHO ADC0809• ; NHIET DO LO VA NHIET DO CAI DAT HIEN THI TREN LCD• ; NHIET DO CAI DAT QUA BIEN TRO• ;*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/*/• DATA_ADC DATA P2• DATA_LCD DATA P0• RS BIT P1.0• RW BIT P1.1• EN BIT P1.2• A0 BIT P3.7• START BIT P3.6• QUAT BIT P1.3• LONHIET BIT P1.4• T_00 DATA 50H• T_01 DATA 51H• T_02 DATA 52H• T_10 DATA 54H• T_11 DATA 55H• T_12 DATA 56H• T_SET DATA 57H• T_CUR DATA 58H• SOKYTU DATA 59H• T_DELAY DATA 5AH• HS0 DATA 5BH• HS1 DATA 5CH• ;*/*/*/*/*/*//*/*/*/*/*/*/*/*/*/*/*/*/*/*/*
1/19/2015 137
• MAIN:• MOV TMOD, #11H• LCALL EN_LCD• MOV DATA_LCD,#80H• LCALL SENDCOMAND• MOV DPTR,#V_CAIDAT• MOV SOKYTU,#7• LCALL WRITETEXT• MOV DATA_LCD,#0C0H• LCALL SENDCOMAND• MOV DPTR,#V_TUCTHOI• MOV SOKYTU,#7• LCALL WRITETEXT• MOV DPTR,#MA_HT• LAP1:• LCALL LOAD_DL• LCALL DK_TB• MOV T_DELAY,#2• LCALL DELAY• JMP LAP1• ;****************************• LOAD_DL:• CLR A0• CLR START• LCALL DE_LAY• SETB START• MOV T_SET,DATA_ADC• MOV DATA_LCD,#87H• LCALL SENDCOMAND• MOV A,T_SET• MOV HS0,#9• MOV HS1,#3• MOV R0,#50H• LCALL TINH_T• MOV A,T_02• MOVC A,@A+DPTR• MOV DATA_LCD,A• LCALL SENDTEXT
1/19/2015 138

1/19/2015
70
• MOV A,T_01• MOVC A,@A+DPTR• MOV DATA_LCD,A• LCALL SENDTEXT• MOV DATA_LCD,#'.'• LCALL SENDTEXT• MOV A,T_00• MOVC A,@A+DPTR• MOV DATA_LCD,A• LCALL SENDTEXT• SETB A0• CLR START• LCALL DE_LAY• SETB START• MOV T_CUR,DATA_ADC• MOV DATA_LCD,#0C7H• LCALL SENDCOMAND• MOV A,T_CUR• MOV HS0,#8• MOV HS1,#5• MOV R0,#54H• LCALL TINH_T• MOV A,T_12• MOVC A,@A+DPTR• MOV DATA_LCD,A• LCALL SENDTEXT• MOV A,T_11• MOVC A,@A+DPTR• MOV DATA_LCD,A• LCALL SENDTEXT• MOV DATA_LCD,#'.'• LCALL SENDTEXT• MOV A,T_10• MOVC A,@A+DPTR• MOV DATA_LCD,A• LCALL SENDTEXT• RET• ;*************************
1/19/2015 139
• TINH_T:• MOV B,#100• DIV AB• MOV 32H,A• MOV A,B• MOV B,#10• DIV AB• MOV 31H,A• MOV 30H,B• MOV B,HS0• MOV A,30H• MUL AB• MOV B,#10• DIV AB• MOV 40H,A• MOV A,31H• MOV B,HS0• MUL AB• ADD A,40H• MOV B,#10• DIV AB• MOV 40H,A• MOV 35H,B• MOV A,32H• MOV B,HS0• MUL AB• ADD A,40H• MOV B,#10• DIV AB• MOV 36H,B• MOV 37H,A• MOV B,HS1• MOV A,30H• MUL AB• MOV B,#10• DIV AB• MOV 38H,B• MOV 40H,A• MOV A,31H• MOV B,HS1• MUL AB• ADD A,40H• MOV B,#10• DIV AB• MOV 40H,A• MOV 39H,B
1/19/2015 140

1/19/2015
71
• MOV A,32H• MOV B,HS1• MUL AB• ADD A,40H• MOV B,#10• DIV AB• MOV 3AH,B• MOV 3BH,A• MOV A,35H• ADD A,38H• MOV B,#10• DIV AB• MOV @R0,B• INC R0• ADD A,36H• ADD A,39H• MOV B,#10• DIV AB• MOV @R0,B• INC R0• ADD A,3AH• ADD A,37H• MOV @R0,A• RET• ;*********************************• DK_TB:• MOV A,T_02• CJNE A,T_12,KT_C• MOV A,T_01• CJNE A,T_11,KT_C• MOV A,T_00• CJNE A,T_10,KT_C• RET
1/19/2015 141
• KT_C:• JNC MOQUAT• SETB QUAT• CLR LONHIET• RET• MOQUAT:• CLR QUAT• SETB LONHIET• RET• ;*********************************• WRITETEXT:• PUSH 00• PUSH ACC• MOV R0,#00• LOOP1:• MOV A,R0• MOVC A,@A+DPTR• MOV DATA_LCD,A• LCALL SENDTEXT• INC R0• MOV A,R0• CJNE A,SOKYTU,LOOP1• POP ACC• POP 00• RET• ;****************
1/19/2015 142

1/19/2015
72
• EN_LCD:• CLR RS• CLR RW• SETB EN• MOV DATA_LCD,#38H• LCALL SENDCOMAND• MOV T_DELAY,#5• LCALL DELAY• MOV DATA_LCD,#38H• LCALL SENDCOMAND• MOV T_DELAY,#5• LCALL DELAY• MOV DATA_LCD,#0CH• LCALL SENDCOMAND• MOV DATA_LCD,#01H• LCALL SENDCOMAND• RET• ;***********************• SENDCOMAND:• CLR RS• SJMP PULSE_EN• SENDTEXT:• SETB RS• NOP
1/19/2015 143
• PULSE_EN:• CLR RW• CLR EN• NOP• SETB EN• MOV TH1,#HIGH(-1000)• MOV TL1,#LOW(-1000)• CLR TF1• SETB TR1• JNB TF1,$• CLR TR1• RET• ;****************• DELAY:• MOV TH0,#00• MOV TL0,#00• CLR TF0• SETB TR0• JNB TF0,$• CLR TR0• DJNZ T_DELAY,DELAY• RET• ;****************
1/19/2015 144

1/19/2015
73
• DE_LAY:• PUSH 01• MOV R1,#250• DJNZ R1,$• POP 01• RET• ;****************• MA_HT:• DB '0123456789'• V_CAIDAT:• DB 'T_SET: '• V_TUCTHOI:• DB 'T_CUR: '• END•
• Ket qua thi cong :• Nhiet do 0• Vout(IN0) 39,2mV
• Vout(ngo ra LM335) 10 mV/K
•
•
1/19/2015 145
5.4.3.2.Hệ thống ñiều khiển toác ñoä ñoäng cô DC duøng vi xöû líSơ đồ 1:
1/19/2015 146

1/19/2015
74
SƠ đồ 2: ĐIỀU KHIỂN TỐC ĐỘĐỘNG CƠ DC DÙNG MÁY TÍNH giao tiếp vi điều khiển AT89S52
1/19/2015 147
• Bao gồm 6 khối chính:• + Máy tính : điều khiển và thiết lập tốc độ.• + RS 232 : nhiệm vụ chính là giao tiếp giữa máy tính và vi
xử lý.• + Vi xử lý AT 89S52 : nhận tín hiệu điều khiển từ máy tính
và điều xung điều khiển dộng cơ.• + Driver cầu H – L298: điều khiển động cơ.• + Động cơ: sử dụng động cơ một chiều 12VDC.• + Cảm biến Encoder: đếm xung để trả về vi xử lý.•
1/19/2015 148

1/19/2015
75
Sơ đồ 3: Điều khiển tốc độ động cơ DC dùng máy
tính giao tiếp vi điều khiển PIC 16F887
Sơ đồ mạch:
1/19/2015 149
Sơ đồ khối:
1/19/2015 150

1/19/2015
76
• Hệ thống gồm các khối sau:
• - Mạch vi điều khiển trung tâm dùng PIC 16F887.
• - Mạch động lực dùng cầu H L298.
• - Khối nguồn 24VDC cho mạch động lực và 5VDC cho mạch
điều khiển.
• - Mạch LCD hiển thị các thông số.
• - Mạch giao tiếp vơi máy vi tính qua cổng nối tiếp dùng IC
MAX 232.
• - Khối động cơ DC 24V, encoder và các tải.
1/19/2015 151
Giao diện Visual Basic 2005:
1/19/2015 152

1/19/2015
77
5.4.3.3.Boä ñònh thôøi caùc thieát bò ñöôïc ñieàu khieån baèng vi xöû lyù.
1/19/2015 153
5.4.3.4.Boä ñieàu khieån cöôøng ñoä saùng duøng vi xöû lí
1/19/2015 154

1/19/2015
78
5.4.4.ÑIEÀU KHIEÅN ÑOÄNG CÔ DC BAÈNG MÔØ vaø PID
1/19/2015 155
Sơ đồ điều khiển sử dụng PID mờ :
1/19/2015 156

1/19/2015
79
5.4.5.Ño vaø kieåm soaùt troïng löôïng cuûa vaät:
1/19/2015 157
• Khi đặt vật có khối lượng m lên bàn cân, khối lượng của vật dưới tácđộng của trọng lực sẽ tác động một lực F = P = mg lên loadcell, lựcnày làm load cell bị biến dạng, dẫn đến các cảm biến sức căng củaload cell bị nén hay giãn, làm cho các điện trở của cảm biến thay đổitheo. Từ đó cầu Wheatone trên loadcell bị mất cân bằng, ngõ ra củacầu sẽ xuất hiện một điện áp vi sai tương ứng với trọng lượng này. Điện áp này được đưa vào bộ khuyếch đại vi sai khuyếch đại lên rấtnhiều lần ( khoảng 1000 lần) trước khi đưa vào vi điều khiển xử lýADC. Vi điều khiển nhận giá trị điện áp tương ứng đưa về từ tầngkhuyếch đại xử lý ADC chuyển thành tín hiệu số. Từ tín hiệu số nàyvi điều khiển thực biện các phép toán được lập trình sẵn để tìm rakhối lượng của vật và hiển thị lên LCD và gởi lên máy tính. Nếu khốilượng của vật lớn hơn khối lượng cực đại cho phép gởi từ máy tínhxuống sẽ xuất ra báo động. Khối lượng cực đại cho phép được gởitừ máy tính xuống vi điều khiển. Khi mới khởi động ta chọn giá trịcực đại là 10kg để so sánh, hiển thị và chờ dữ liệu gởi xuống.
•
1/19/2015 158

1/19/2015
80
5.4.6.Điều khiển dùng PLCXét hệ thống điều khiển băng chuyền đóng hộp táo dùngPLC
1/19/2015 159
• Nguyeân lyù laøm vieäc• Khi ngöôøi coâng nhaân nhaán nuùt START (PB1), daây chuyeàn vaän chuyeån thuøng seõ chaïy, khi thuøng carton vaøo ñuùng vò trí thì coâng taéc haønh trình SE2 seõ bò nhaán, boä ñieàu khieån seõ laøm ngöøng daây chuyeàn laïi. Luùc naøy daây chuyeàn vaän chuyeån taùo seõ chaïy, töøng traùi taùo seõ rôùt vaøo thuøng, nhôø coù boä caûm bieán quang (photoelectric) SE1, vaø boä ñieàu khieån seõ ñeám caùc traùi taùo, khi ñuû soá löôïng, daây chuyeàn vaän chuyeån taùo bò ñieàu khieån ngöøng laïi. Quaù trình seõ ñöôïc laëp laïi. Ñaây laø daây chuyeàn ñieàu khieån theo logic taét môû vaø ñieàu khieån baèng PLC Siemens S7-200.
•
1/19/2015 160

1/19/2015
81
1/19/2015 161
1/19/2015 162

1/19/2015
82
1/19/2015 163
• -Maõ boä nhôù: Leänh STL• Network 1• LD I0.0• O Q1.5• AN I0.1• = Q1.5• Network 2• LD Q1.5• AN Q1.1• = Q1.0• Network 3• LD I0.2• LDN I0.3• CTU 10• #0010• Network 4• LD CTU 10• ON I0.3• A Q1.5• =Q1.1• END
1/19/2015 164

1/19/2015
83
5.4.7.Hệ thống điều khiển phân bố (DCS)
• Trong phaïm vi moät caáu hình ñôn giaûn, ta seõsöû duïng caùc saûn phaåm cuûa Siemens laø card giao dieän CP5611 ñeå gheùp noái maùy tính vaøthieát bò vaøo ra phaân taùn coù caáu truùc module ET200M ñeå gheùp noái caùc ñaàu ño cuõng nhövan ñieàu chænh.
1/19/2015 165
1/19/2015 166

1/19/2015
84
5.4.8. Heä thoáng ñieàu khieån duøng card PCI
1/19/2015 167
Ứng dụng điều khiển tốc độ động cơ một chiều.
1/19/2015 168

1/19/2015
85
5.4.9. Điều khiển động cơ DC dùng card USB
6008
1/19/2015 169
Câu hỏi và bài tập:
• 1.Trình bày điều khiển ON/OFF và dạng cơ bản của bộ điềukhiển PID liên tục .
• 2. Trình baøy sô ñoà khoái heä thoáng ñieàu khieån soá voøng kín.• 3. Lấy mẫu là gì? Trình bày định lý lấy mẫu.
• 4. Bộ giữ bậc không (ZOH) có nhiệm vụ gì? Nêu hàm truyền
của bộ giữ bậc không.
• 5. Nêu các ứng dụng của hệ thống điều khiển số.
• 6. Trình bày các phép biến đổi từ C(s) ra C(z). Nêu công thức.
• 7. Trình bày thuật toán PID số.
• 8. Trình bày ảnh hưởng của khâu bão hòa.
1/19/2015 170

1/19/2015
86
• 9.Boä ñieàu khieån PID:
• Thieát keá boä ñieàu khieån PID rôøi raïc duøng phöông phaùp bieánñoåi hình thang(song tuyeán tính).
• 10. Trình bày đặc điểm của công cụ điều khiển số bằng máy
tính (CNC).
• 11.Nêu đặc điểm maùy CNC ñôøi môùi cuûa GE fanucautomation series .
• 12. Trình bày thí dụ điều khiển nhiệt độ dùng máy tính giao
tiếp với vi điều khiển AT 89C51 qua cổng COM.
• 13. Trình bày thí dụ điều khiển nhiệt độ dùng máy tính giao
tiếp với vi điều khiển PIC 16F887/877A qua cổng COM.
1/19/2015 171
sKs
KK
sE
sUsG d
ippid .
)(
)()( ++==
• 14. Trình bày thí dụ điều khiển tốc độ động cơ DC dùng máy
tính giao tiếp với vi điều khiển AT 89S52 qua cổng COM.
• 15. Trình bày thí dụ điều khiển tốc độ động cơ DC dùng máy
tính giao tiếp với vi điều khiển PIC 16F887/877A qua cổng
COM.
• 16. Trình bày thí dụ đo và điều khiển trọng lượng của vật
dùng máy tính giao tiếp với vi điều khiển PIC 16F887/877A
qua cổng COM.
• 17. Trình bày hệ thống điều khiển dùng PC sử dụng card CP-
5611.
• 18. Trình bày hệ thống điều khiển băng chuyền đóng hộp táo
dùng PLC S7-200.
• 19. Trình bày hệ thống điều khiển nhiệt độ dùng card PCI
1711.
1/19/2015 172

1/19/2015
87
• 20. Trình bày hệ thống điều khiển nhiệt độ dùng card PCI 6221.
• 21. Trình bày hệ thống điều khiển tốc độ động cơ DC dùngcard PCI 1711.
• 22. Trình bày hệ thống điều khiển tốc độ động cơ DC dùngcard PCI 6221.
• 23. Trình bày hệ thống điều khiển tốc độ động cơ DC dùngcard 6008.
• 24.Cho •
• Duøng caùc kyõ thuaät bieán ñoåi tìm G(z), T=0,1 sec• -biến ñổi thuận• -biến ñổi ngược• -biến đổi hình thang (song tuyến tính)
1/19/2015 173
)10)(2(
)20)(1()(
++
++=
ss
sssG
• 25.Boä ñieàu khieån PI: •
• Thieát keá boä ñieàu khieån PI rôøi raïc duøng phöông phaùp bieánñoåi ngöôïc.
• 26. Boä ñieàu khieån PD: •
• Thieát keá boä ñieàu khieån PD rôøi raïc duøng phöông phaùp bieánñoåi ngöôïc.
• 27.
1/19/2015 174
s
KKsG i
pPI +=)(
sKKsG dpPD .)( +=

1/19/2015
88
Bài 27
1/19/2015 175
1/19/2015 176

1/19/2015
89
1/19/2015 177
Bài 31
1/19/2015 178

1/19/2015
90
Bài 32
1/19/2015 179





























