Embed Size (px)
Citation preview

SISTEMI AUTOMATSKOG UPRAVLJANJA
Žarko ZečevićElektrotehnički fakultetUniverzitet Crne Gore

Mapa kursa
Modelovanje
2
Klasifikacija sistemaDiferencijalne jednačineFunkcija prenosa• Polovi, nule, pojačanje• Strukturni blok
dijagrami• Graf toka signalaModel u prostoru stanja• Kanonične forme• Linearizacija• Rješavanje jednačina
stanja
Kontrolabilnost i opservabilnostStabilnost sistema• Raus• NikvistPerformanse SAU-a• Stacionarno stanje• Prelazni proces• Kompleksni domenFrekvencijske karakteristike• Bodeovi dijagrami
Specifikacije sistemaKompenzatori• Pojačavač• Integralni kompenzator• Diferencijalni
kompenzator• Diferencijalno -
integralni kompenzatorPID regulatorFizičke realizacijeDiskretizacija kontinualnih regulatora
DizajnAnaliza

Predavanje 4
Ishodi učenja:Nakon savladavanja gradiva sa ovog predavanja studenti će moći da:
Definišu fundamentalnu matricu sistema
Odrede analitički izraz promjenljivih u prostoru stanja za zadatupobudu i početne uslove
Odrede funkciju prenosa sistema na osnovu poznatog SS modela
Odrede SS model na osnovu poznate funkcije prenosa
Lineraziju nelinearni sistem zadat u prostoru stanja
3
Prostor stanja: jednačine kretanja,
kanonične forme, linearizacija sistema

Kretanje sistema u prostoru stanja
Generalno, u prostoru stanja ponašanje sistema se modeluje na sljedećinačin:
Promjenljive stanja predstavljaju minimilan skup linearno nezavisnihpromjenljivih, pri čemu one mogu, ali ne moraju da imaju fizički smisao.
4
Specijalno za LTI sisteme važi:
Nas zanima kako analitičkim putem da odredimo vremenske oblikepromjenljivih stanja x(t) i izlaza sistema y(t), za zadate početne uslovex0 i pobudu sistema u(t). Odnosno, zanima nas kako da riješimo gornjisistem jednačina.
0( ) ( ( ), ( ), ), (0)
( ) ( ( ), ( ), ).
t t t t
t t t t
x f x u x x
y g x u
0( ) ( ) ( ), (0)
( ) ( ) ( ).
t t t
t t t
x Ax Bu x x
y Cx Du

Odziv na početne uslove
Za početak posmatrajmo homogenu diferencijalnu jednačinu, odnosnoslučaj kada je ulazni signal jednak nuli:
Za rješenje gornjeg sistema se može pretpostaviti da je u obliku reda:
Uvrštavanjem prethodne jednačine u polaznu jednačinu iizjednačavanjem koeficijenata sa lijeve i desne strane dobija se:
Funkcija označena sa eAt se zove matrična ekponencijalna funkcija, zboganalogije sa skalarnom eksponencijalnom funkcijom:
5
0, (0) . x Ax x x
2 30 1 2 3( ) .t t t t x a a a a
2 2 3 30 0
1 1( ) ... .
2! 3 !tt t t t e
Ax I A A A x x
2 2 3 31 11 .
2! 3 !ate at a t a t
, .at at t td de ae e e
dt dt A AA

Odziv na početne uslove
6
Dakle, prirodni odziv sistema je jednak:
Matrična funkcija eAt se u terminologiji upravljanja zove ifundamentalna matrica sistema ili matrica tranzicije, pri čemu se običnooznačava sa Φ(t). Matrica Φ(t) sadrži sve informacije o dinamicisistema, odnosno njome je definisano kretanje sistema u prostoru stanja.Fundamentalna matrica se može definisati i u Laplasovom domenu.Prebacivanjem homogene diferencijalne jednačine u s-domen dobija se:
Ukoliko su početni uslovi poznati u nekom proizvoljnom trenutku t1,onda će odziv na početne uslove biti jednak (osobina vremenskeinvarijantnosti):
1 1( ) ( ) ( ).t t t t x Φ x
0( ) ( )s s sX x AX 10( ) ( )s s X I A x
0 0( ) ( ) .tt e t Ax x Φ x
1 1( ) ( ) .t s Φ I AL
( )sΦ

Autonomni sistem (u(t)=0) je zadat u prostoru stanja:
Odrediti fundamentalnu matricu sistema u vremenskom i kompleksnom domenu, kao i promjenljive stanja, za zadate početne uslove.
Primjer - odziv na početne uslove
7
2 1 2, (0) .
0 3 1
x x x
1
1 1
2 ( 2)( 3)( ) ( ) .
10
3
s s ss s
s
Φ I A
2 2 3
3( )
0
t t t
t
t
e e et e
e
AΦ
2 2 3 2 31
0 3 32
( ) 2 3( )
( ) 10
t t t t t
t t
x t e e e e et
x t e e
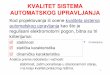
Φ xPromjenljiva stanja x1
Promjenljiva stanja x2
>> A=[-2 1;0 -3]
>> x0=[2;1];
>> syms t
>> Fi=expm(A*t)
>> x=Fi*x0
Fi =
[ exp(-2*t), exp(-2*t) - exp(-3*t)]
[ 0, exp(-3*t)]
x =
3*exp(-2*t) - exp(-3*t)
exp(-3*t)

Primjer - odziv na početne uslove
8
Na slikama iznad su prikazanepromjenljive stanja za različite početneuslove. Na slici lijevo su prikazaneodgovarajuće trajektorije sistema uprostoru stanju, odnosno zavisnostf(x1,x2). Na primjer, sistem se kreće iztačke (1, 3) prikazanom putanjom izaustavlja se u tački (0,0). Sa prvedvije slike se uočava da mu je potrebnooko 3s da pređe pomenutu (i svakuostalu) putanju.

Do analitičkog izraza za promjenljive stanja pobuđenog sistema setakođe može doći posmatranjem vektorske jednačine stanja u s-domenu:
Iz prethodne jednačine se može izraziti vektor X(s):
Izraz za x(t) se dobija primjenom inverzne Laplasove transformacije naprethodnu jednačinu, pri čemu treba primijetiti da drugi sabirak uprethodnom izrazu predstavlja konvoluciju u vremenskom domenu:
Odziv sistema na pobudu
0( ) ( ) ( ).s s s s X x AX BU
9
0 0, ( ) ,u t x Ax B x x
1 10 0( ) ( ) ( ) ( ) ( ) ( ) ( ).s s s s s s s X I A x I A B U Φ x Φ BU
00
( ) ( ) ( ) ( ) . t
t t t dx Φ x Φ Bu
Konačno, izlazni signal je jednak:
00
( ) ( ) (t) ( ) ( ) ( ) (t).t
t t t t d y Cx Du CΦ x C Φ Bu Du

Primjer – odziv sistema na zadatu pobudu
Sistem je zadat u prostoru stanja:
Odrediti odziv zadatog sistema na step pobudu. Smatrati da su početni uslovijednaki nuli.
Fundamentalna matrica sistema je:
Odziv sistema je jednak:
10
1
2
2 1 0 (0), (0) ,
0 3 1 (0)
0 1 .
xu
x
y
x x x
x
2 2 3
3( ) .
0
t t t
t
t
e e et e
e
AΦ
A=[-2 1;0 -3];B=[0;1];C=[0 1];
x0=[2;1];
syms t tau
Fi=expm(A*t)
Fi1=subs(Fi,t-tau)
x=Fi*x0+int(Fi1*B*1,tau,0,t)
y=C*x
00
3
( )= ( ) ( ) ( )
1 2= e .
3 3
t
t
y t t t t d
Cx CΦ x C Φ BUlazni signal je step funkcija, pa jeu(τ)=1. Voditi računa da je riječ oLTI sistemu, odnosno da važi principsuperpozicije. Granice integralazavise od vremenskog intervala ukojem je definisan ulazni signal.

Određivanje TF na osnovu SS
Da bi odredili vezu između prostora stanja i funkcije prenosa, jednačinestanja i izlaza iz vremenskog domena treba prebaciti u Laplasov domen:
Konačno, veza između funkcije prenosa matrica A, B, C i D.
Posmatrajući prethodni izraz, može se zaključiti da je karakterističnipolinom sistema jednak:
11
( ) ( ) ( )
( ) ( ) ( ).
t t t
t t t
x Ax Bu
y Cx Du
( ) - (0 ) ( ) ( )
( ) ( ) ( )
s s s s
s s s
X x AX BU
Y CX DU
1
1
( ) ( ) ( )
( ) ( ) ( )
s s s
s s s
X I A BU
Y C I A B D U
0
1 ( )( ) ( ) .
det( )
adj ss s
s
I AG C I A B D C B D
I A
( ) det( ).f s s I A

Primjer - određivanje TF na osnovu SS
Odrediti funkciju prenosa sistema zadatog u prostoru stanja matricama:
Funkcija prenosa je jednaka:
Karakteristični polinom se može odrediti i na sljedeći način:
12
21
3 2
12 65 39( ) ( ) .
4 2 3
s sG s s
s s sC I A B
21 2 3
50 0 1 , , 1 2 0 .
12 1 5
A B C
>> A=[1 2 3;0 0 1;-2 -1 -5]; B=[2;5;1]; C=[1 2 0]; syms s
>> G=simplify(C*(s*eye(3)-A)^-1*B)
G =
(12*s^2 + 65*s + 39)/(s^3 + 4*s^2 + 2*s + 3)
>> roots([1 4 2 3])
>> det(s*eye(3)-A) % karakteristični polinom se može odrediti na osnovu A
s^3 + 4*s^2 + 2*s + 3
3 2( ) det( ) 4 2 3.f s s s s sI A

Određivanje SS na osnovu TF
Prethodno je pokazano kako odrediti funkciju prenosa sistema, ako jepoznat njegov model u prostoru stanja. Sada treba pokazati kako dobitimodel u prostoru stanja, u slučaju kada je poznata funkcija prenosa.
Postoji beskonačan broj „realizacija“ sistema u prostoru stanja, jerpostoji beskonačan broj različitih prostora. Sa druge strane različitimrealizacijama sistema u prostoru stanja uvijek odgovara jedna funkcijaprenosa.
Prostor stanja predstavlja n-dimenzionalni koordinatni sistem, te serazličite realizacije mogu dobiti raznim linearnim transformacijama, tj.smjenama i prelaskom u drugi koordinatni sistem.
Sve realizacije su ekvivalentne u matematičkom smislu. Međutim,postoje neki stanadardni načini zapisivanja jednačina stanja, odnosnotakozvane kanonične realizacije. Jedna reprezentacija može imatiprednosti u odnosu na druge. Na primjer, za potrebe analize,promjenljive stanja nekad treba odabrati tako da imaju fizički smisao, anekad ih je pogodnije zapisati u kanoničnoj formi.
13

Određivanje SS na osnovu TF
Prije nego što pokažemo kako se određuje model sistema u prostorustanja zadatog funkcijom prenosa u opštem obliku:
razmotrićemo funkciju prenosa prvog reda i odgovarajuću diferencijalnujednačinu:
Kvazi-analogni blok dijagram ili simulacioni dijagram sistema jedijagram koji se sastoji od elementarnih komponenti: integratora,sabirača i pojačavača. Konkretno za dati primjer, on se može nacrtati naosnovu diferencijalne jednačine.
14
( ) ( ) / ( ) ( ) ( ) ( )k
G s X s U s x t ax t ku ts a
( ) ( ) ( )x t ax t ku t
11 1 0
11 1 0
...( ) , i 1.
...
m mm m
nn nn
b s b s b s bG s m n a
s a s a s a
1/s
-
k
a
u(t) x(t)( )x t

Dijagonalna kanonična forma
Paralelno programiranje je postupak za određivanje modela u prostorustanja sistema opisanih funkcijama prenosa koje imaju proste i realnepolove:
15
11 1 0
11 2
...( ) , .
( )( ).. ( i 1
. )
m m nm m i
in
n
i
b s b s b s b kG s
s a s a s a s am n a
Kvazi-analogni blok dijagramsistema je prikazan na slici desno.Za promjenljive stanja se usvajajuizlazi iz integratora. Modelsistema u prostoru stanja sedobija očitavanjem jednačina sakvazi-analognog blok dijagrama.
...
1/s
a1
-
k1
1/s
a2
-
k2
1/s
an
-
kn
u(t) y(t)
x1(t)
x2(t)
xn(t)
1( )x n
2( )x n
( )Nx n

Dijagonalna kanonična forma
Nakon ispisivanja jednačina za svaki integrator, formira se model uprostoru stanju u matričnom obliku:
16
1 11 1
22 2
1
2
... 0 0 0
0 ... 0 0
... ... 0 0
0 ... ... 0
0 ... ... 0
n
nn n n
x a k
a k
a
a
x
x x k
x x
u
1
2
1 1 ... 1 1
N
x
x
y
xDKF
...
1/s
a1
-
k1
1/s
a2
-
k2
1/s
an
-
kn
u(t) y(t)
x1(t)
x2(t)
xn(t)
1( )x n
2( )x n
( )Nx n

Dijagonalna kanonična forma
Model u prostoru stanja predstavljen na ovaj način se zove dijagonalnakanonična forma, jer je matrica A dijagonalna. Još jedan naziv za ovajoblik je modalna forma, jer su dijagonalni elementi matrice A jednakipolovima sistema, koji se nekad zovu i modovima.
Korisna osobina dijagonalne kanonične forme je što se u njenom slučajuračunanje fundamentalne matrice pojednostavljuje:
Na ovaj način se značajno pojednostavljuje računanje odziva na početneuslove. Mana ovog pristupa je što promjenljive stanja u kanoničnomprostoru nemaju fizički smisao, pa se odgovarajućim transformacijamatreba vratiti u fizički prostor stanja.
17
1
2
0 0
0 0
0 0 n
a
a
a
A
1
2
0 0
0 0
0 0 n
a t
a t
t
a t
e
ee
e
A

Sistem je zadat funkcijom prenosa:
Predstaviti sistem u prostoru stanja u obliku dijagonalne kanonične forme. Odrediti odziv na početne uslove.
Ispod su prikazani model sistem u prostoru stanja i simulacioni blok dijagram. Model sistema se može formirati direktno, imajuću u vidu DKF, ili na osnovu simulacionog blok dijagrama.
Ispod je dat odziv sistema na početne uslove:
Primjer - paralelno programiranje
18
3 2 1( ) .
( 1)( 2) 1 2
sG s
s s s s
1 0 2, ,
0 2 1
1 1 .
A B
C
1 0
0 2 0( ) ,
0
tt
t
t
et e e
e
AΦ
1 1
0 2 22 2
0 (0) (0)( ) ( ) .
(0)0 (0)
t t
t t
e x x et t
xe x ex Φ x
1x1/s
1x
-
2
2x1/s
2x
-
u(t)
1
2
y(t)-1

Jordanova kanonična forma
Sistem je moguće predstaviti u dijagonalnoj formi jedino ako susopstvene vrijednosti proste i realne. Ako funkcija prenosa imavišestruke polove, onda se ona u prostoru stanja može zapisati u blok-dijagonalnoj ili Jordanovoj kanoničnoj formi.
Neka je funkcija prenosa data kao proizvod elementarnih funkcijaprenosa:
Na gubeći na opštosti, pretpostavili smo da je prvi pol sistema trostruk.
Na osnovu date funkcije prenosa treba nacrtati simulacioni blokdijagram, na osnovu kojeg se jednostavno formira model sistema uprostoru stanja.
19
11 1 0
31 2
1311 122 3
21 1 1
...( )
( ) ( )...( )
, .( ) (
3)
m mm m
N
Ni
i i
b s b s b s bG s
s a s a s a
kk k k
s a s a s am N
s a

Jordanova kanonična forma
.
20
1 11
12 2
3 3
4 4
1
2
0 0 0
0
0 0 0 0
0 0 0
0 0
1
1 0
1 0
1
0 1Nn n
a
x x
x x
x xu
x x
x x
a
a
a
a
1
2
13 1
3
4
2 211
n
N
x
x
xy
x
x
k kk k k
J
JKF...
1/s
a1
-
1/s
a2
-
1/s
aN
-
1/s
a1
-
a1
1/s
-
k11
k12
k13
k2
kN
u4x 4x
y
3x3x
nxnx
2x2x
1x 1x

Jordanova kanonična forma
Model u prostoru stanja predstavljen na prethodni način se zove blok-dijagonalna kanonična ili Jordanova kanonična forma, jer matrica J imastrukturu Jordanove matrice. Fundamentalna matrica se i u ovomslučaju jednostavnije računa:
21
1
1
1
1 0
0 1
1
0 0
n n
a
a
a
J
1 1 1
1 1
1
1
1!
0
0 0
na t a t a t
a t a tt
a t
n n
te te e
n
e tee
e
J
2
0 0
0
0 n
a
a
J
0A
0
2
0 0
0
0 n
t
a t
t
a t
e
ee
e
J
A 0
0

Kontrolabilna kanonična forma
Ako je funkcija prenosa data u generalnom obliku, tada postoje dvastandardna načina zapisivanja matrica u prostoru stanja: kontrolabilnakanonična forma i opservabilna kanonična forma.
U cilju određivanja kontrolabilne kanonične forme, funkciju prenosatreba pomožiti sa pomoćnim signalom E(s), a zatim preko njega izrazitiulazni i izlazni signal:
22
11 1 0
11 1 0
...( ) i ,
.1.
..
m mm mn n
n
n
b s b s b s bG s
s a sm n a
a s a
11 1 0
11 1 0
... ( ) ( )( )
... ( ) ( )
m mm mn n
n
b s b s b s b E s Y sG s
s a s a s a E s U s
11 1 0
11 1 0
( ... ) ( ) ( )
( ... ) ( ) ( )
n nn
m mm m
s a s a s a E s U s
b s b s b s b E s Y s

Kontrolabilna kanonična forma
Prethodne jednačine u vremenskom domenu imaju sljedeći oblik:
23
( ) ( 1)1 1 0
( ) ( 1)1 1 0
... ( ),
... ( ).
n nn
m mm m
e a e a e a e u t
b e b e b e b e y t
1 1 2
2 2 3
( 2)11
( 1)
nn nn
nn
x e x xx e x x
x xx e
x e
( )1 2 1 1 2 0 1... ( ),n
n n n nx a x a x a x a x u t
1 1 2 1 1( ) ... .o m m m my t b x b x b x b x
Za promjenljive stanja se usvajaju promjenljiva e i njenih prvih n - 1izvoda:
Prvih n-1 jednačinastanja se dobija izsmjena.
Zadnja jednačina stanja i jednačina izlaza se dobijaju uvrštavanjemsmjena u početne jednačine:

Kontrolabilna kanonična forma
Konačno model u prostoru stanja ima sljedeći oblik:
24
1
1
0 1 1
0 1 2 1
00 0 0
0 0 0
.
0 0 0 01
0
1
1
1
n n
m n m
n n
n
n
b b b
a a a a
B 0A C
KKF
Može se uočiti da se zadnja vrsta matrice A formira na osnovukoeficijenata imenioca funkcije prenosa, dok je gornja sporedna dijagonalaispunjena jedinicama. Matrica C se formira na osnovu brojioca funkcijeprenosa, dok su kod matrice B svi koeficijenti jednaki nuli, sem zadnjeg.
Samo kontrolabilni sistemi mogu da se zapišu u ovom kanoničnom obliku.O kontrolabilnosti će biti više rečeno na narednim predavanjima.Kontrolabilna kanonična forma je pogodna za dizajn kontrolera koji sedizajniraju direktno u prostoru stanja, ali oni neće biti pokriveni u ovomkursu.

Kontrolabilna kanonična forma
Na osnovu prethodnih jednačina stanja može se nacrtati kvazi-analogniblok dijagram sistema:
25
Obratiti pažnju da su svi integratori redno vezani i da ja prvomintegratoru pridužena promjenljiva xn, a zadnjem integratoru x1. Na ovajnačin se dobija kompaktnija forma kvazi-analognog blok dijagrama.
u(t)1/s
a1a2
1/s
a0
1/s
-
0b1b2b
1/s ...
mb
...
...
...
1/s...
...
aman-1
y(t)
1x2x 1x2x3xnx 1mx mx

Primjer - direktno programiranje, KKF
Sistem je zadat funkcijom prenosa:
Predstaviti sistem u prostoru stanja u obliku kontrolabilne kanonične forme.
Da bi direktno primijenili pravilo za kreiranje KKF, koeficijent uz najveći stepen imenioca treba svesti na jedinicu:
Model sistema u prostoru stanja ima sljedeći oblik:
Simulacini blok dijagram je dat na slici desno.
26
1 1 1
2 2 2
0 1 0, 3 1 .
3 3 1
x x xu y
x x x
2
2 6( ) .
2 6 6
sG s
s s
2 2
2 6 3( ) .
2 6 6 3 3
s sG s
s s s s
u(t)1/s
3
1/s
3
3
-
y(t)
1x2x 1x2x

Opservabilna kanonična forma predstavlja još jednu standardnurealizaciju sistema.
Gornja funkcija prenosa se može zapisati u vidu diferencijalne jednačine:
Dalje, prethodna diferencijalna jednačina se može zapisati na sljedećinačin:
Integraljenjem prethodnog izraza n puta, dobija se y(n), na osnovu čega se crta kvazi-analogni blok dijagram i formira model u prostoru stanja.
Opservabilna kanonična forma
27
11 1 0
11 1 0
...( ) , i 1.
...
m mm m
nn nn
b s b s b s bG s m n a
s a s a s a
( ) ( 1) ( ) ( 1)1 1 0 1 1 0... ... n n m m
n m my a y a y a y b u b u b u b u
( ) ( ) ( ) ( 1)0 0 1 1 1( ) ( ) ( ) ... .n m m n
m m ny b u a y b u a y b u a y a y
1
0 0 1 1 1( ) ( ) ( ) ... .n n n m
m m ny b u a y b u a y b u a y a y

Opservabilna kanonična forma
28
,
, .
T To k o k
To k o k
A A B C
C B D D
Kvazi-analogni blok dijagram sistema datog obliku opservabilnekanonične forme je dat na slici ispod.
Jednačine stanja se očitavaju sa dijagrama. Može se pokazati da zaopservabilnu i kontrolabilnu kanoničnu formu važi sljedeća veza:
am
1/s
an-2
1/s
an-1
1/s
-1a0
y(t)nxnx1nx
bm
1/s 1/s
a1
1x 1x 2x 2x
b1
u(t)
b0
1mx 1mx

Opservabilna kanonična forma
Dakle, OKF sistema ima sljedeći oblik:
29
0 0
1 1
2
1
1
11
0 0 0
0 0
.
0 0
0 0
... 0 0 0
1
1
1
1
n n
n m
n n
n
m n
a b
a b
a b
a
A B C
0OKF
Samo opservabilni sistemi mogu da se zapišu u ovoj kanoničnoj formi. Oopservabilnosti će biti više riječi na narednim predavanjima.Opservabilna kanonična forma je pogodna za dizajn opservera. Opserverisu uređaji koji na osnovu dostupnih mjerenja vrše estimaciju stanjasistema. Ako su brojilac i imenilac funkcije prenosa istog reda, tada ihtreba podijeliti. Koeficijent koji se dobije pri dijeljenju predstavljamatricu D, a od ostatka se formiraju matrice A, B i C, na neki odprethodno opisanih načina.

Primjer - direktno programiranje, OKF
Sistem je zadat funkcijom prenosa:
Predstaviti sistem u prostoru stanja u obliku opservabilne kanonične forme.
Najprije treba podijeliti brojilac i imenilac funkcije prenosa, s obzirom da suistog reda, a zatim se treba osloboditi koeficijenta uz najstariji član imenioca:
Rezultujući količnik u stvari predstavlja matricu D, dok se na osnovuostatka formiraju matrice A, B i C, imajući u vidu opšti oblik OKF-a.
Nacrtati kvazi-analogni blok dijagram.
30
1 1 1
2 2 2
00 2 1
, 1 0 .31 3 2
2
x x xu y u
x x x
2
2
2(s) .
2 6 4
sG
s s
22
2 2 2 2
1 3(2 6 4) 32 1 3 12 2(s) .
2 6 4 2 6 4 2 2 6 4 2 3 2
s s s ss sG
s s s s s s s s
>> [R Q]=deconv([1 0 2],[2 6 4])
R =
0.5000
Q =
0 -3 0

Primjer – DC motor
Na slici ispod je prikazana principijelna šema DC motora. Modelovati datisistem u prostoru stanja:
a) za promjenljive stanja usvojiti fizičke promjenljive,
b) u obliku dijagonalne/Jordanove kanonične forme (ukoliko je moguće),
c) u obliku kontrolabilne kanonične forme,
d) u obliku opservabilne kanonične forme.
Napomena: pogledati rok iz 2017. godine.
31
+
u(t)
R
M
L
e(t)
+
b
,
Ji(t)

Linearizacija dinamičkih sistema
Veliki broj fizičkih sistema ima nelinearnu prirodu. Da bi se iskoristileprednosti koje pruža linearna teorija, nelinearni modeli se mogulinearizovati razvijanjem nelinearne jednačine u Tejlorov red, u okoliniradne tačke xs, i skraćivanjem Tejlorovog razvoja na prva dva člana.
Kod dinamičkih sistema (onih koji se matematički opisujudiferencijalnim jednačinama) linearizacija se najčešće vrši u okolinistacionarne tačke ili ekvilibrijuma, koja se dobija izjednačavanjem izvodasa nulom (izvod od konstante je jednak nuli). U praksi, veliki brojdinamičkih sistema se može aproksimirati linearnim diferencijalnimjednačinama u okolini radnog opsega od interesa. Na primjer, DC motorje linearan na nekom radnom opsegu napona. Za velike vrijednostinapona brzina motora ulazi u zasićenje, dok se za male vrijednostinapona motor uopšte ne rotira.
32
( )( ) ( ) ( )
s
s s
x
df xf x f x x x stariji članovi
dx

33
Linearizacija dinamičkih sistema
( ) 2f t t
(̂ ) 4 0.25( -4)f t t
( ) 0.25f t t
Na slici je ilustrovan primjer linearizacije „obične“ funkcije f(t)= t+2.Ako usvojimo ts=4 kako radnu tačku, tada se funkcija f(t) može razviti uTejlorov red na sljedeći način:
' 1(̂ ) ( ) ( ) ( ) 4 ( 4) 4 0.25( 4).
2ss st t
s
f t f t f t t t t tt
Dodatno, možemo uvesti smjene koordinata:
i zapisati linearizovanu funkciju na sljedeći način:
U suštini, linearizovana funkcijapredstavlja tangentu u radnojtački, pri čemu njeno odstupanjeod vrijednosti funkcije f(t) rastesa porastom δ(t).
( ) 4 i (̂ ) 4, ( )f tt ft t
0. ( ) ( )5 .2f t t

Posmatrajmo sada dinamički sistem opisan sljedećom nelinearnomdiferencijalnom jednačinom prvog reda:
34
( ) ( ( ), ( )), (0 ) .px t f x t u t x x
( , ) ( , )( ( ), ( )) ( , ) ( ) ( )
s s
s s s
x u
df x u df x uf x t u t f x u x x u u stariji članovi
dx du
Pretpostavimo da je ulaz u konstantan i jednak us, i da promjenljivastanja x u stacionarnom stanju ima konstantu vrijednost xs. Funkcijaf(x(t),u(t)) se u okolini stacionarne tačke (xs, us) može razviti u Tejlorovred:
S obzirom da par (xs, us) predstavlja stacionarnu tačku, to znači da važi:
pa se prethodna jednačina svodi na:
( , ) 0, s sx f x u
0
( ) ( , ) ( , )( ) ( ).
s s
ss s
u u
d x x df x u df x ux x u u
dt dx du
Linearizacija dinamičkih sistema
( )sd x x dx
dt dt

Da bi dobili linearni model, u prethodnom izrazu treba uvesti smjene:
gdje δx i δu predstavljaju odstupanje promjenljive stanja i ulaza odnjihovih stacionarnih vrijednosti. Konačno, linearizovani model ima oblik:
gdje su a i b vrijednosti odgovarajućih parcijalnih izvoda u tačkama xs ius:
35
, ,x s u sx x u u
, (0 ) ,x x u x p sa b x x
( , ) ( , ), .
s sx u
f x u f x ua b
dx du
Linearizacija dinamičkih sistema
Na sličan način se linearizuje izlazna jednačina:
( ) ( , )( , ) ( , ) ( ) ( ),
s s
s s s s
x u
g x g x uy g x u g x u x x u u
dx du
( , ) ( , )( ) ( ),
s s
s s s
u u
f x u f x uy y x x x u
dx du
( , )
( , )
s
s
y s
x
u
y y
g x uc
dx
g x ud
du
.y x uc d
ys

Linearizacija dinamičkih sistema
U opštem slučaju, model u prostoru stanja nelinearnog sistema ima oblik:
Neka je xs i us set stacionarnih tačaka koje zadovoljavaju gornji sistemdiferencijalnih jednačina, i neka je ys vektor izlaza u stacionarnomstanju:
Multivarijabilne funkcije se na sličan način razvijaju u Tejlorov red:
36
( ) ( ( ), ( )), (0 ) ,
( ) ( ( ), ( )).pt t t
t t t
x f x u x x
y g x u
( ) ( ( ), ( )) 0,
( ) ( ( ), ( )).s s s
s s s
t t t
t t t
x f x u
y g x u
( ) ( , ) ( ( ) ) ( ( ) ),
( ) ( , ) ( ( ) ) ( ( ) ).
s s
s s
s s
s s
s s s s
s s s s
t t t
t t t
x x x xu u u u
x x x xu u u u
f fx f x u x x u u
x u
g gy g x u x x u u
x u

Linearizacija dinamičkih sistema
Prethodne jednačine se mogu zapisati na isti način kao za jednodimenzionislučaj:
gdje su δx, δu i δy vektori odstupanja od odgovarajućih stacionarnihtačaka. Matrice A, B, C i D su Jakobijeve matrice, odnosno matriceparcijalnih izvoda:
37
( ) ( ), ,
( ) ( ), .
s s
s s
s s
s s
x x x xu u u u
x x x xu u u u
f x,u f x,uA B
x u
g x,u g x,uC D
x u
( ) ( ) ( ),
( ) ( ) ( ).
t t t
t t t
x x u
y x u
δ Aδ Bδ
δ Cδ Dδ

Primjer 1 - linearizacija
Kontinualni sistem je opisan diferencijalnom jednačinom:
Linearizovati model pod pretpostavkom da ulazni signal varira u okolinivrijednosti u=2.
Najprije treba odrediti stacionarnu tačku sistema (iz uslova da je prvi izvodjednak nuli):
Linearizovani model sistem ima sljedeći oblik:
odnosno:
38
2( )( ) ( ( ), ( )) ( ) , (0 ) 0.5.
3
u tx t f x t u t x t x
22 162 0
3 9s s su x x
162,
9 s su x
( ) ( ) ( ),
( ) ( ) ( ),x x u
y x u
t t t
t t t
δ Aδ Bδ
δ Cδ Dδ
,
1 3| ,
82s sx x u u
s
fA
x x
,
2 4| .
3 3s sx x u u s
fB u
u
3 4.
8 3x x u
Matrice A i B su po definciji:

Primjer 1 - linearizacija
39
( )x t ( )x t
(̂ )x t (̂ )x t
sx
ˆ( ) ( )L sx t x t x
su
(̂ ) ( ) su t u t u
( )x t
( )u t
( )u t
Na slici je prikazana simulacionašema diferencijalnih jednačina (uSimulink-u). Sa slike lijevo se možeuočiti da linearizovani i nelinearnimodel sistema imaju istu vrijednostodziva u stacionarnom stanju.
16 / 9

Jednačina rotacije klatna ima sljedeći oblik:
Nakon uvođenja promjenljivih , dobija je model u prostoru stanja:
Primjer 2 - linearizacija
Modelovati klatno prikazano na slici, a zatim linearizovati dobijeni model uokolini stacionarne tačke. Smatrati da je F = 0.
40
θ l
F
mg
22
2sin , .F g
dJ Fl mgl J mldt
1 1 1 2 2
2 2 1 2 1
( , , )
( , , ) sin ,
x f x x F x
g Fx f x x F x
l ml
1 2,x x
Stacionarne tačke (ravnotežno stanje) su x1s=x2s=Fs=0. One su mogu dobiti izjednačina, mada jasno je da će u ravnotežnom stanju ugao i brzina klatna dabudu jednaki nuli.
1 1
22
0 1 0
.10
x x
Fxx
g
l ml
1 1
1 2, ,
2 2
1 2, ,
1
,
1
,
0 1
0
0
1
s s s s
s s s s
s s
s s
F F F F
F F F F
F F
F F
f f
x xg
f fl
x x
f
F
fml
F
x x x x
x x x x
x x
x x
A
B