Embed Size (px)
Citation preview
14
1. FUNDAMENTACION TEORICA
A continuación se presentan las teorías que incluyen todas las variables de estudio del
proyecto de investigación.
A. NITINOL
El Nitinol, fue desarrollado en el U.S. Naval Ordnance Laboratory por un equipo
dirigido por W.J. Buehler. Físicamente, es un alambre de acero o una cuerda metálica de
guitarra que se contrae con gran fuerza mientras se le aplica un voltaje y luego vuelve a la
posición original una vez eliminado el mismo, llamándosele a este movimiento el efecto
memoria de forma (SME). Estas aleaciones con memoria (SMAs) poseen una estructura de
cristales uniforme que, a distintas temperaturas, cambian radicalmente hacia otra diferente.
Las aleaciones con memoria de forma, se han realizado con diferentes tipos de
elementos metálicos a distintas temperaturas de transición, para que varíe para cada
aleación y pueda estar al servicio durante la fabricación tomando en cuenta la razón de los
componentes metálicos y la presencia de otros elementos.
Cuando la aleación se encuentra por debajo de la temperatura de transición puede ser
extendida y deformada sin daños permanentes, a diferencia de otros materiales. Antes de
haber sido estirada si esta es calentada (ya sea eléctricamente o por una fuente de
calentamiento externa) sobre la temperatura de transición, la aleación recupera o retorna a
15
su forma original y se arruina completamente la anterior deformación. Al mismo tiempo,
las aleaciones con memoria logran encogerse hasta el 8% de su longitud. La longitud más
corta es cuando se contrae y en este proceso existe una utilizable suma de fuerzas.
§ CARACTERÍSTICAS
El Nitinol, tiene en proporciones casi iguales de átomos de Níquel y Titanio, las
diferencias de menos de 1% en su relación pueden cambiar las temperaturas de transición
en un rango de –100°C a sobre 100°C. En virtud de lo expuesto anteriormente se puede
concluir que estos materiales requieren una cuidadosa formulación y procesamiento. Las
aleaciones que son para usar a temperatura ambiente (20°C) tienen una temperatura de
transición cercana a los 70°C. Las aleaciones con altas temperaturas de transición pueden
ser de ciclos más rápidos ya que se enfrían con mayor velocidad a temperatura ambiente
pero requieren más calor y tensión para activarse; y las que tienen temperaturas de
transición por debajo de la temperatura ambiente generalmente necesitan ser enfriados en
su estado de reposo; pero permanecerán activos cuando se mantengan a temperatura
ambiente. Por otra parte en la operación SMAs se exhibe una temperatura por histérisis o
espacio vacío entre la temperatura de contracción y la temperatura de reposo, esto sucede
cuando se aumenta levemente la temperatura de reposo.
En cuanto a fuerza se trata, el Nitinol pueden ejercer tanto como 600 millones de
newtones por metro cuadrado, la fuerza ejercida por una aleación en forma de alambre
16
depende de su composición, tamaño y entrenamiento; los alambres largos ejercerán más
fuerza que los alambres pequeños teniendo la misma composición y el mismo
entrenamiento. A continuación se hablará de otros términos relacionados con la fuerza y
los músculos de metal. Para cada una de estas fuerzas, se multiplica el valor dado por el
área transversal para tener la fuerza de ese alambre.
La fuerza máxima de recuperación es la fuerza más grande que un alambre ejercerá y
esto sucede cuando se calienta, para el Nitinol esto es alrededor de 600MPa (Megapascal o
Millones de newtons por metro cuadrado); mientras que la fuerza recomendada de
recuperación es la fuerza que se encarga de proteger y preservar el entrenamiento de fábrica
de los músculos de metal, para el Nitinol es aproximadamente de unos 200Mpa. Por otra
parte se encuentran la fuerza parcial recomendada, esta es la fuerza que debe ser aplicada
para extender o deformar un músculo de metal, enfriado es usualmente de 30 a 60 MPa.
Una de las características más importante es la relación de recobro ya que aquí es
donde se compara la relación entre de deformación (enfriar) y contracción (calentar) en
cuanto a las longitudes de una cuerda muscular e indica cuanto movimiento se espera tener.
La máxima relación de recobro de razón es expresada por un porcentaje de la máxima
tensión.
La extensión de ruptura no es más que la fuerza que un alambre puede resistir antes de
romperse, esto varía con el diámetro del alambre, composición, temperatura y
procesamiento. Para el Nitinol, es alrededor de 10 veces la fuerza máxima de recuperación.
17
La superelasticidad es una propiedad de SMAs donde, en la fase de alta temperatura, el
metal puede ser dilatado o deformado mucho más que otros metales sin causar daños
permanentes a la estructura cristal del metal, las aleaciones que tienen temperaturas de
transición por debajo de la temperatura de habitación (20°C) son superelásticas a
temperaturas de habitación y por encima de estas.
También se encuentran los módulos jóvenes que son, una constante describiendo la
habilidad de los materiales para soportar torceduras (cambio de longitud) pero para SMAs,
los módulos jóvenes varían con la composición, elongación, entrenamiento y temperatura.
Para el Nitinol en la fase de baja temperatura es alrededor de 28 GPa (Gigapascal) y en la
fase alta temperatura es aproximadamente 75 GPa.
El Nitinol es virtualmente no magnético, pero también es cierto que un alambre
derecho cargado con una corriente genera un muy pequeño campo magnético como la
hacen un alambre enrollado(como en motores y solenoide). Con respecto a las propiedades
eléctricas como lo son voltaje, corriente y resistencia de un músculo de metal, son
seguidas por la básica ecuación de electricidad, conocida como; la Ley de Ohm:
V = I x R.
Por su parte el volumen de resistividad indica la oposición a la corriente eléctrica
indiferente a la forma del material, para el Nitinol esto es aproximadamente 70µΩ/cm en la
fase de baja temperatura, y 90µΩ/cm en la fase de alta temperatura. La resistencia lineal es
18
la que indica la oposición a la corriente cuando un material es convertido en alambre, y es
medido en Ohms. En la forma de alambre, el Nitinol tiene una resistencia por unidad de
longitud determinado su volumen de resistividad y diámetro.
El nivel recomendado de corriente en un músculo de metal, es un típico nivel de
corriente que lo activará pero no sobre caliente rápidamente el alambre en temperatura de
habitación (20°C). La temperatura inicial de activación es el punto en el cual el cristal en un
alambre comienza a cambiar de fase de baja temperatura a la fase de alta temperatura aquí
es donde comienza la deformación y luego retorna a su forma previa (transformación
reversiva). La temperatura final de activación es el punto en donde todo cristal de un
alambre ha cambiado de la fase de alta temperatura esto completa la transformación
reversiva. La temperatura de fundición es la temperatura a la cual un sólido se convierte en
líquido, la aleación de Nitinol se funde aproximadamente a 1300°C.
La velocidad con la cual un músculo de metal se contrae y relaja depende de muchos
factores incluyendo el circuito de manejo del alambre, las condiciones alrededor y la
composición del alambre; de todas formas, la fase de cambio ocurre sólo cuando el alambre
alcanza su temperatura de transición, este ejerce la misma fuerza si este se calienta rápido o
lentamente. La conexión para los músculos de metal aumenta el diámetro mientras más
pequeño en longitud pueden ejercer grandes fuerza en los puntos de ancla y estructuras de
soporte.
Cualquier conexión para un músculo de metal necesita dos aspectos: fuerza y
conductividad eléctrica.
19
La transformación de electricidad en movimiento vía la resistencia al calor de un
alambre y la fase de cambio del Shape Memory Effect(efecto memoria de cambio), tiene
una baja eficiencia, cerca del 5 % del potencial de la electricidad para trabajar se convierte
en fuerza física, con un 95% de pérdida como calor. Por comparación, pequeños motores
eléctricos DC trabajan con 30% o más eficiencia en convertir electricidad en movimiento
pero sin embargo, los músculos de metal proveen beneficios que lejos de su ineficiencia
eléctrica tiene otras propiedades como lo es su alta fuerza a razón de peso, gran fuerza
inicial, y operación a bajo voltaje a veces permite inventos con mejor ejecución general
que otros sistemas y permite la realización de proyectos que serán difíciles o imposibles de
realizar usando motores o solenoides.
B. MICROCONTROLADORES
Un Microcontrolador, es un circuito integrado programable que tiene todos los
componentes de un computador. Se emplea para controlar el funcionamiento de una tarea
determinada y, debido a su reducido tamaño, suele ir incorporado en el propio dispositivo al
que gobierna. Puede decirse, que el microcontrolador es un computador dedicado ya que en
su memoria sólo reside un solo programa destinado a gobernar una aplicación determinada.
Sus líneas de entrada/salida, soportan el conexionado de los sensores y actuadores del
dispositivo a controlar y todos los recursos complementarios disponibles tienen como única
finalidad atender sus requerimientos. Una vez programado y configurado, sólo sirve para
atener y gobernar la tarea asignada.
20
Puede resumirse entonces que, un Microcontrolador es un computador completo,
aunque de limitades prestaciones, que está contenido en el chip de un circuito integrado y
se destina a gobernar una sola tarea.
El microcontrolador es un sistema cerrado. Todas las partes del computador están
contenidas en su interior y sólo salen al exterior las líneas que gobiernan los periféricos.
(Ver Figura N° 1).
§ IMPORTANCIA DE LOS MICROCONTROLADORES.
El número de productos que funcionan con uno o varios microcontroladores, aumenta
súbitamente. A partir de este siglo, la empresa Dataquest pronostica que en cada hogar
Americano, existirán no menos de 240 microcontroladores.
Periféricos Periféricos
C
Figura 1. Microcontrolador. Fuente: Microcontroladores. José M. Angulo e Ignacio Martínez.
21
A su vez se tiene que, la industria informática acapara la mayor parte de fabricación de
microcontroladores. Casi todos lo periféricos del computador, desde el ratón o el teclado
hasta la impresora, escáner y otros, son regulados por uno o varios de ellos.
También los electrodomésticos de la línea blanca (lavadoras, hornos, lavajilla, entre
otros) y de línea marrón (televisores, videos, aparatos musicales, entre ellos) incorporan
numerosos microcontroladores. Igualmente los sistemas de supervisión, vigilancia y
alarmas en los edificios, utilizan estos chips para optimizar el rendimiento de los
ascensores, calefacción, aire acondicionado, alarmas de incendio, robo, entre otros.
Las comunicaciones y sus sistemas de transferencia de información, utilizan
profusamente estos pequeños computadores, incorporándolos en los grandes automatismos
y en los modernos teléfonos.
La instrumentación y la electromedicina son dos campos idóneos para la implantación
de estos circuitos integrados. Una importante industria consumidora de microcontroladores
es la de automoción, que los aplica en el control de aspectos tan populares como la
climatización, la seguridad y los frenos ABS.
En fin, resumiendo se tiene que, las comunicaciones y los productos de consumo
general absorben más de la mitad de la producción de microcontroladores. El resto se
distribuye entre el sector de la automoción y la industria. Son innumerables los usos que se
le dan a estos chips, que día a día van haciendo la tarea más fácil, rápida y óptima en el
desarrollo de todos los trabajos cotidianos del mundo entero.
22
§ PROGRAMACION DE MICROCONTROLADORES
La utilización de los lenguajes más cercanos a la máquina (de bajo nivel), representan
un considerable ahorro de código en la confección de los programas, lo que es muy
importante debido a la estricta limitación de la capacidad de la memoria de instrucciones.
Los programas bien realizados en lenguaje Ensamblador optimizan el tamaño de la
memoria que ocupan y su ejecución es muy rápida.
Los lenguajes de alto nivel más empleados con microcontroladores son el C y el Basic,
de los que existen varias empresas que comercializan versiones de compiladores e
intérpretes para diversas familias de microcontroladores.
El lenguaje que se utiliza para la programación de los microcontroladores es el
Ensamblador, que es el más cercano a la máquina. También son frecuentes los programas
en el lenguaje C y en Basic.
Datos para la Programación del PIC.
23
El PIC se programa por acceso a una dirección determinada por A1-A4 mientras
R/W=0, y no por medio del bus de datos. Se programa con R/W=0, para no confundir con
el vector de interrupciones, ya que los códigos de programación de la máscara coinciden
con los del vector, pero cuando está el vector R/W=1.
Lo que se puede programar con el PIC es el nivel de la máscara. El mask location
register se carga en el flanco negativo de la señal de habilitación que es una AND entre
CSO.CSI.R/W, ya que durante una operación normal del MPU las líneas de direcciones y
de R/W pueden estar en un estado indeterminado. El VMA se hace así para evitar escrituras
erróneas en el mask register en sistemas que no sean el 6800.
Esto significa que en la carga del mask register el dato en el bus de datos no interesa.
Sin embargo, en este modo, también se accede a la ROM, ya que la ROM no tiene línea de
R/w, entonces con direccionarla es suficiente para que ponga los datos en el bus, y tanto el
MPU como la ROM estarán usando el bus de datos. Por lo tanto la línea R/W debe ser
usada como un chip select de la ROM activo en alto.
§ FAMILIA DE LOS PIC
Una de las labores triviales del ingeniero de diseño, es la elección del PIC que mejor
satisfaga las necesidades del proyecto con el mínimo presupuesto. En el año 1997 se
dispone de 52 versiones diferentes y ha aumentado esta cifra, considerablemente cada año.
24
El Microchip dispone de cuatro familias de microcontroladores de 8 bits para adaptarse
a las necesidades de la mayoría de los clientes potenciales.
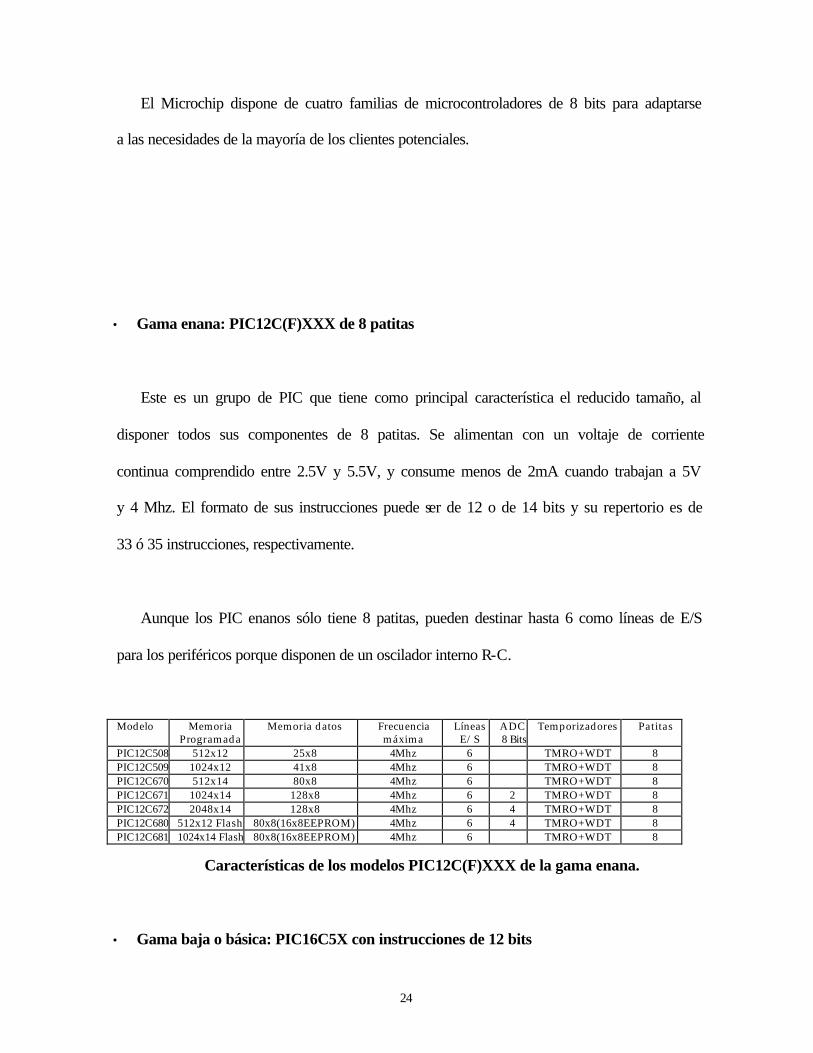
• Gama enana: PIC12C(F)XXX de 8 patitas
Este es un grupo de PIC que tiene como principal característica el reducido tamaño, al
disponer todos sus componentes de 8 patitas. Se alimentan con un voltaje de corriente
continua comprendido entre 2.5V y 5.5V, y consume menos de 2mA cuando trabajan a 5V
y 4 Mhz. El formato de sus instrucciones puede ser de 12 o de 14 bits y su repertorio es de
33 ó 35 instrucciones, respectivamente.
Aunque los PIC enanos sólo tiene 8 patitas, pueden destinar hasta 6 como líneas de E/S
para los periféricos porque disponen de un oscilador interno R-C.
Modelo Memoria Programada
Memoria datos Frecuencia máxima
Líneas E/S
ADC 8 Bits
Temporizadores Patitas
PIC12C508 512x12 25x8 4Mhz 6 TMRO+WDT 8 PIC12C509 1024x12 41x8 4Mhz 6 TMRO+WDT 8 PIC12C670 512x14 80x8 4Mhz 6 TMRO+WDT 8 PIC12C671 1024x14 128x8 4Mhz 6 2 TMRO+WDT 8 PIC12C672 2048x14 128x8 4Mhz 6 4 TMRO+WDT 8 PIC12C680 512x12 Flash 80x8(16x8EEPROM) 4Mhz 6 4 TMRO+WDT 8 PIC12C681 1024x14 Flash 80x8(16x8EEPROM) 4Mhz 6 TMRO+WDT 8
Características de los modelos PIC12C(F)XXX de la gama enana.
• Gama baja o básica: PIC16C5X con instrucciones de 12 bits
25
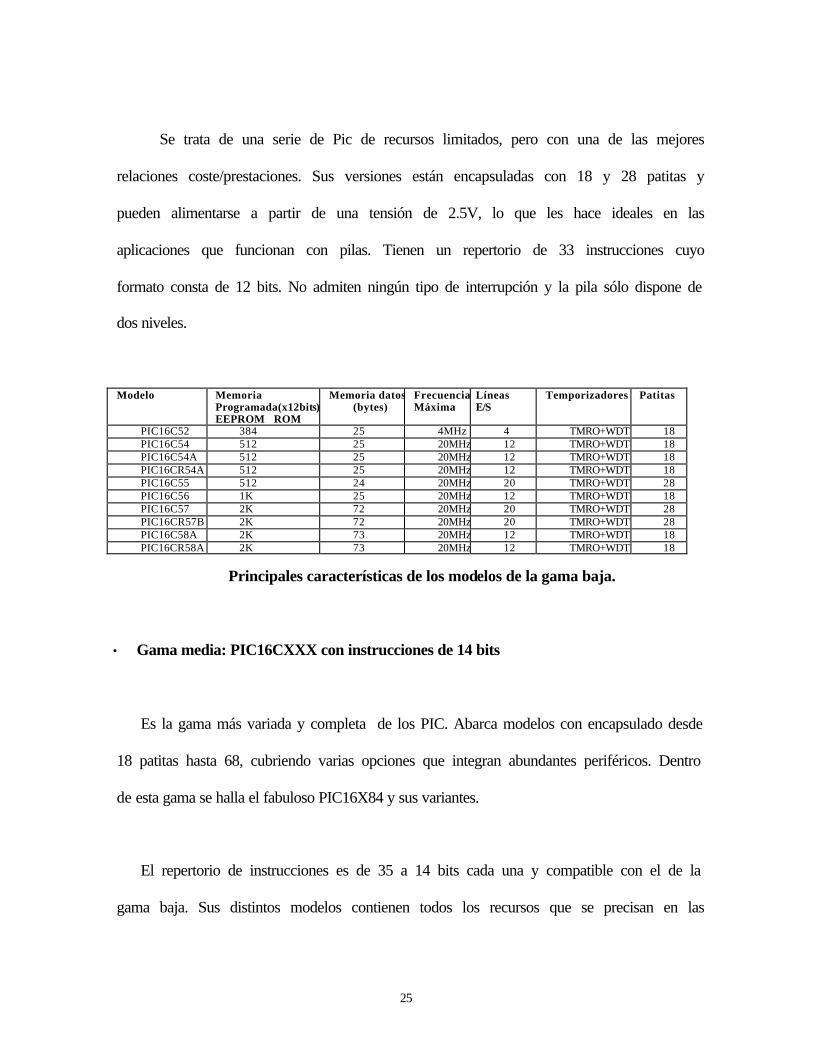
Se trata de una serie de Pic de recursos limitados, pero con una de las mejores
relaciones coste/prestaciones. Sus versiones están encapsuladas con 18 y 28 patitas y
pueden alimentarse a partir de una tensión de 2.5V, lo que les hace ideales en las
aplicaciones que funcionan con pilas. Tienen un repertorio de 33 instrucciones cuyo
formato consta de 12 bits. No admiten ningún tipo de interrupción y la pila sólo dispone de
dos niveles.
Modelo Memoria Programada(x12bits)EEPROM ROM
Memoria datos(bytes)
Frecuencia Máxima
Líneas E/S
Temporizadores Patitas
PIC16C52 384 25 4MHz 4 TMRO+WDT 18 PIC16C54 512 25 20MHz 12 TMRO+WDT 18 PIC16C54A 512 25 20MHz 12 TMRO+WDT 18 PIC16CR54A 512 25 20MHz 12 TMRO+WDT 18 PIC16C55 512 24 20MHz 20 TMRO+WDT 28 PIC16C56 1K 25 20MHz 12 TMRO+WDT 18 PIC16C57 2K 72 20MHz 20 TMRO+WDT 28 PIC16CR57B 2K 72 20MHz 20 TMRO+WDT 28 PIC16C58A 2K 73 20MHz 12 TMRO+WDT 18 PIC16CR58A 2K 73 20MHz 12 TMRO+WDT 18
Principales características de los modelos de la gama baja.
• Gama media: PIC16CXXX con instrucciones de 14 bits
Es la gama más variada y completa de los PIC. Abarca modelos con encapsulado desde
18 patitas hasta 68, cubriendo varias opciones que integran abundantes periféricos. Dentro
de esta gama se halla el fabuloso PIC16X84 y sus variantes.
El repertorio de instrucciones es de 35 a 14 bits cada una y compatible con el de la
gama baja. Sus distintos modelos contienen todos los recursos que se precisan en las
26
aplicaciones de los microcontroladores de 8 bits. También dispone de interrupciones y una
pila de 8 niveles que permite el anudamiento de subrutinas.
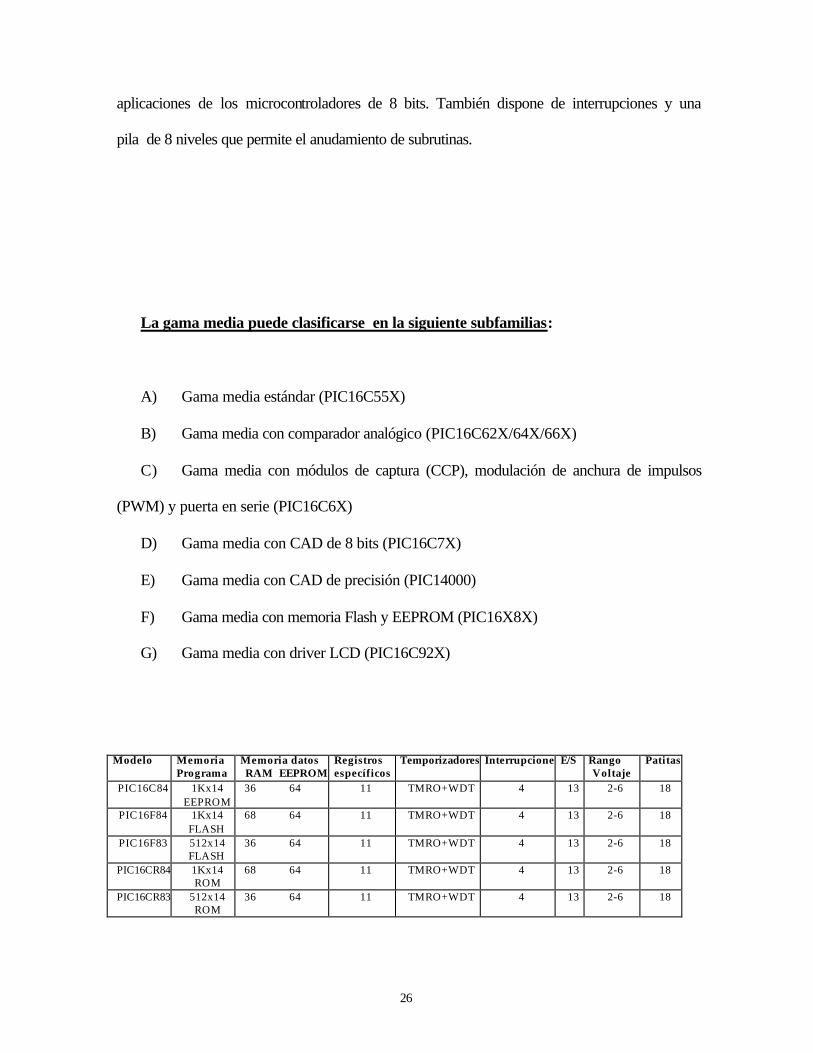
La gama media puede clasificarse en la siguiente subfamilias:
A) Gama media estándar (PIC16C55X)
B) Gama media con comparador analógico (PIC16C62X/64X/66X)
C) Gama media con módulos de captura (CCP), modulación de anchura de impulsos
(PWM) y puerta en serie (PIC16C6X)
D) Gama media con CAD de 8 bits (PIC16C7X)
E) Gama media con CAD de precisión (PIC14000)
F) Gama media con memoria Flash y EEPROM (PIC16X8X)
G) Gama media con driver LCD (PIC16C92X)
Modelo Memoria Programa
Memoria datos RAM EEPROM
Registros específicos
Temporizadores Interrupcione E/S Rango Voltaje
Patitas
PIC16C84 1Kx14 EEPROM
36 64 11 TMRO+WDT 4 13 2-6 18
PIC16F84 1Kx14 FLASH
68 64 11 TMRO+WDT 4 13 2-6 18
PIC16F83 512x14 FLASH
36 64 11 TMRO+WDT 4 13 2-6 18
PIC16CR84 1Kx14 ROM
68 64 11 TMRO+WDT 4 13 2-6 18
PIC16CR83 512x14 ROM
36 64 11 TMRO+WDT 4 13 2-6 18
27
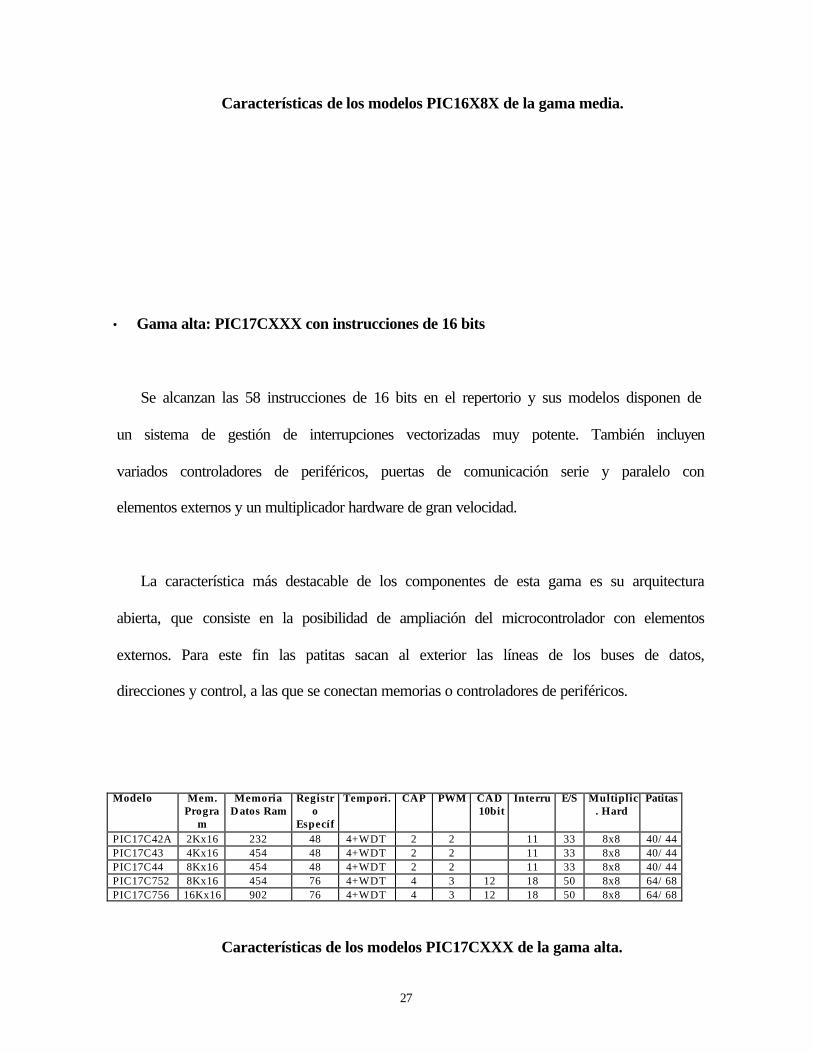
Características de los modelos PIC16X8X de la gama media.
• Gama alta: PIC17CXXX con instrucciones de 16 bits
Se alcanzan las 58 instrucciones de 16 bits en el repertorio y sus modelos disponen de
un sistema de gestión de interrupciones vectorizadas muy potente. También incluyen
variados controladores de periféricos, puertas de comunicación serie y paralelo con
elementos externos y un multiplicador hardware de gran velocidad.
La característica más destacable de los componentes de esta gama es su arquitectura
abierta, que consiste en la posibilidad de ampliación del microcontrolador con elementos
externos. Para este fin las patitas sacan al exterior las líneas de los buses de datos,
direcciones y control, a las que se conectan memorias o controladores de periféricos.
Modelo
Mem. Progra
m
Memoria Datos Ram
Registro
Específ
Tempori. CAP PWM CAD 10bit
Interru E/S Multiplic. Hard
Patitas
PIC17C42A 2Kx16 232 48 4+WDT 2 2 11 33 8x8 40/44 PIC17C43 4Kx16 454 48 4+WDT 2 2 11 33 8x8 40/44 PIC17C44 8Kx16 454 48 4+WDT 2 2 11 33 8x8 40/44 PIC17C752 8Kx16 454 76 4+WDT 4 3 12 18 50 8x8 64/68 PIC17C756 16Kx16 902 76 4+WDT 4 3 12 18 50 8x8 64/68
Características de los modelos PIC17CXXX de la gama alta.
28
§ MICROCONTROLADOR PIC16F84
Este PIC, pertenece a la familia de la gama media y dentro de ella es uno de los más
pequeños, sólo tiene 18 patitas. Además es el que dispone de menos recursos. El resto de
sus parientes tiene conversores AD y DA, comparadores analógicos, tensión interna de
referencia, más líneas de E/S, más capacidad en sus memorias, varios temporizadores y
muchos otros dispositivos de los que el PIC16F84 carece. Pero con todo y ésta pobreza que
viene de nacimiento, cumple con los requisitos esenciales para enseñar a manejar los
microcontroladores y comenzar a diseñar proyectos. Es práctico, sencillo y económico.
La razón exclusiva de su interés se debe, al tipo de memoria de programa que posee. En
el caso del PIC16C84 se trata de una EEPROM de 1K palabra de 14 bits cada una. El
PIC16F84 tiene la misma capacidad de memoria de instrucciones, pero de tipo FLASH.
Ambos disponen de 64 bytes de EEPROM como memoria de datos auxiliar y opcional.
La memoria EEPROM y la FLASH, son eléctricamente gravables y borrables, lo que
permite escribir y borrar el programa bajo prueba manteniendo el microcontrolador en el
mismo zócalo y usando el mismo dispositivo para grabar y borrar. Esta característica
29
supone una gran ventaja con la mayoría de los microcontroladores, que tienen como
memoria de programa reescribible una tipo EPROM. Se graban eléctricamente, pero para
borrarlas hay que someterlas durante cierto tiempo a rayos ultravioleta, lo que implica sacar
del zócalo al circuito integrado y colocarlo en un borrador de EPROM.
Otra ventaja del PIC16F84 en cuanto a simplificar el proceso de escritura, borrado y
reescritura de programas, tan necesario en la fase de diseño, es su sistema de grabación de
datos que se realiza en serie. Para escribir un programa en la memoria, se manda la
información en serie usando sólo dos patitas: la RB6 para la señal de reloj y la RB7 para
los bits de datos serie.
A continuación se muestra los datos más significativos del PIC16F84:
MEMORIA DE PROGRAMA: 1Kx14, FLASH
MEMORIA DE DATOS RAM: 68 bytes
MEMORIA DE DATOS EEPROM: 64 bytes
PILA (STACK): DE 8 NIVELES
INTERRUPCIONES: 4 TIPOS DIFERENTES
JUEGO DE INSTRUCCIONES: 35
ENCAPSULADO: PLASTICO DIP DE 18 PATITAS
FRECUENCIA DE TRABAJO: 10 MHz MAXIMA
TEMPORIZADORES: SOLO 1 (EL TMRO). TAMBIEN TIENE PERRO
GUARDIAN (WDT)
LINEAS DE E/S DIGITAL: 13 (5 PUERTA A Y 8 PUERTA B)
30
CORRIENTE MAXIMA ABSORBIDA: 80 Ma puerta A y 150Ma puerta B
CORRIENTE MAXIMA SUMINISTRADA: 50mA puerta A y 100mA puerta B
CORRIENTE MAXIMA ABSORBIDA POR LINEA: 25Ma
CORRIENTE MAXIMA SUMINISTRADA POR LINEA: 20Ma
VOLTAJE DE ALIMENTACION (VDD): DE 2 A 6 V DC
VOLTAJE DE GRABACION (VPP): DE 12 A 14 V DC.
Los PIC16X8X (entre ellos el PIC16F84), están fabricados con tecnología CMOS de
altas prestaciones y encapsulados en plástico con 18 patitas.
A continuación se comenta y se describen cada una de las patitas de este PIC.
VDD: patita por a que se aplica la tensión positiva de la alimentación.
Vss: patita conectada a tierra o negativo de la alimentación.
OSCI/CLKIN: patita por la que se aplica la entrada del circuito oscilador externo que
proporciona la frecuencia de trabajo del microcontrolador.
OSC2/CLKOUT: patita auxiliar del circuito oscilador.
MCLR#: esta patita es activa con el nivel lógico bajo, lo que se representa con el
símbolo #. Su activación origina la reinicialización o Reset del PIC.
También se usa durante la grabación de la memoria de programa para introducir por
ella la tensión, Vpp, que está comprendida entre 12 y 14 V DC.
RA0-RA4: son las 5 líneas correspondientes a la puerta A.
La línea RA4 multiplexa otra función expresada por TOCKI. En este segundo caso
sirve para recibir una frecuencia externa para alimentar al temporizador interno TMRO.
31
RBO-RB7: estas 8 patitas corresponden a las 8 líneas de E/S digitales de la puerta B.
La línea RB0 multiplexa otra función, que es la de servir como entrada a una petición
externa de una interrupción, por eso se le denomina RB0/INT.
Resumiendo se tiene que, el PIC16F84 tiene un encapsulado de 18 patitas, dos de ellas
soportan la tensión de alimentación, otras dos reciben la señal del oscilador externo y otra
se utiliza para generar un Reset. Las 13 patitas restantes funcionan como líneas de E/S para
controlar las aplicaciones.
C. FOTOCELDAS Y DISPOSITIVOS FOTOELÉCTRICOS.
Las fotoceldas son pequeños dispositivos que producen una variación eléctrica en
respuesta a un cambio en la intensidad de la luz. Las fotoceldas pueden clasificarse como
fotovoltaicas o fotoconductivas.
• CELDAS FOTOVOLTAICAS.
Una celda fotovoltaica es una fuente de energía cuyo voltaje de salida varía en relación
con la intensidad de la luz en su superficie. Una celda fotoconductiva es un dispositivo
pasivo, incapaz de producir energía.
Su resistencia varía en relación con la intensidad de la luz en su superficie.
Industrialmente, las aplicaciones de las fotoceldas caen en dos categorías generales:
1. Detección de la presencia de un objeto opaco.
32
A. La detección puede hacerse en una base de todo o nada, en la que el circuito de la
fotocelda tiene sólo dos estados de salida que representan la presencia o la ausencia de un
objeto. Este es el tipo de detección usada para contar las partes que viajan por una banda
transportadora, o para evitar la operación de un mecanismo si las manos del operador no
están fuera de la zona de trabajo.
B. La detección puede hacerse en una base continua, teniendo el circuito de la fotocelda
una salida continuamente variable que representa la posición variable del objeto. Este es el
tipo de detección usada para “observar” la orilla de una tira de material en movimiento para
evitar que se desvíe demasiado de su posición adecuada.
La ventaja principal de las fotoceldas sobre otros dispositivos de detección es que no se
requiere ningún contacto físico con el objeto en detección.
2. Detección del grado de traslucidez (capacidad de pasar luz) o el grado de
luminiscencia (capacidad de generar luz) de un fluido o un sólido.
En estas aplicaciones, el proceso siempre ha sido dispuesto de manera que la traslucidez
o luminiscencia representen una variable de proceso importante. Algunos ejemplos de
variables que pueden ser medidas de esta área son densidad, temperatura y concentración
de algún compuesto químico específico (monóxido de carbono, dióxido de carbono, agua,
entre otros.)
33
• CELDAS FOTOCONDUCTIVAS.
Como se mencionó antes, las celdas fotoconductivas cambian de resistencia como
respuesta a los cambios en la intensidad de luz (el término formal es iluminación). A
medida que aumenta la iluminación, la resistencia disminuye. Los símbolos esquemáticos
usados con frecuencia para las celdas fotoconductivas, se muestran en la figura 1 que sigue
a continuación:
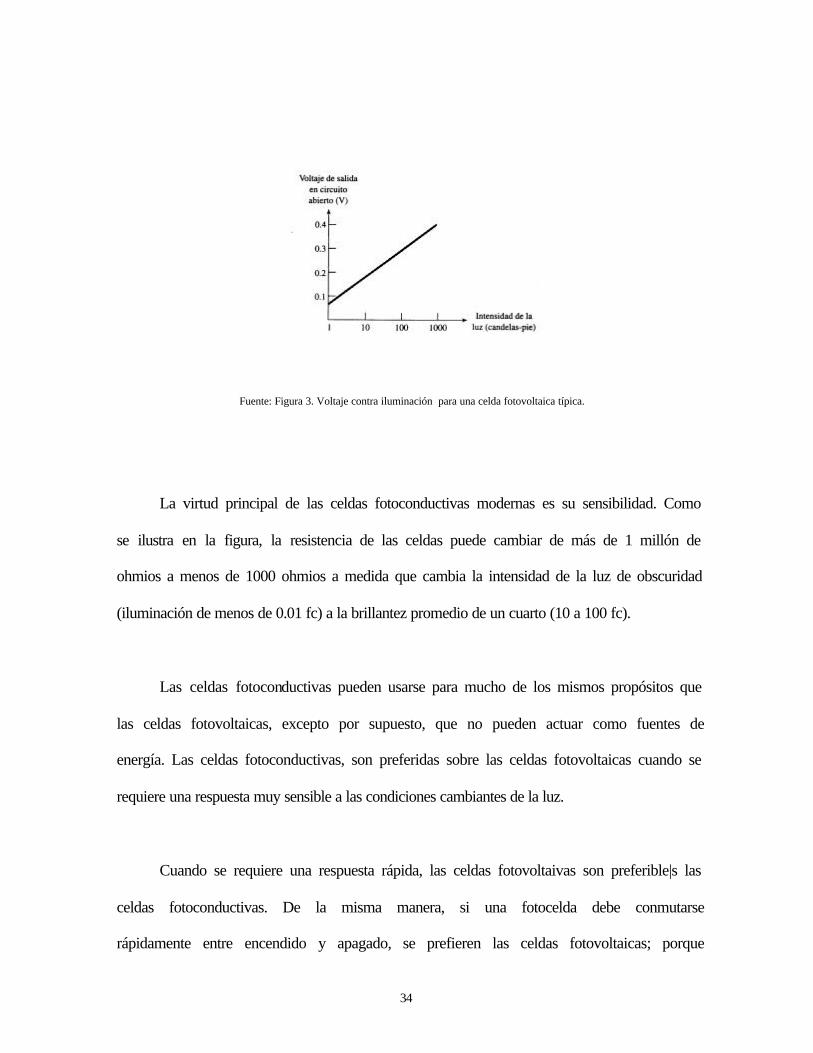
Sin embargo, en la figura 2 que se muestra a continuación, se muestra una gráfica de
resistencia contra iluminación para una celda fotoconductiva típica. Note que ambas escalas
son logarítmicas, para cubrir los grandes rangos de resistencia e iluminación que son
posibles.
Fuente: Figura 2. Símbolos esquemáticos de una celda fotoconductiva.
34
La virtud principal de las celdas fotoconductivas modernas es su sensibilidad. Como
se ilustra en la figura, la resistencia de las celdas puede cambiar de más de 1 millón de
ohmios a menos de 1000 ohmios a medida que cambia la intensidad de la luz de obscuridad
(iluminación de menos de 0.01 fc) a la brillantez promedio de un cuarto (10 a 100 fc).
Las celdas fotoconductivas pueden usarse para mucho de los mismos propósitos que
las celdas fotovoltaicas, excepto por supuesto, que no pueden actuar como fuentes de
energía. Las celdas fotoconductivas, son preferidas sobre las celdas fotovoltaicas cuando se
requiere una respuesta muy sensible a las condiciones cambiantes de la luz.
Cuando se requiere una respuesta rápida, las celdas fotovoltaivas son preferible|s las
celdas fotoconductivas. De la misma manera, si una fotocelda debe conmutarse
rápidamente entre encendido y apagado, se prefieren las celdas fotovoltaicas; porque
Fuente: Figura 3. Voltaje contra iluminación para una celda fotovoltaica típica.
35
pueden conmutarse a mayores frecuencias que las celdas fotoconductivas. Como regla
general, las celdas fotoconductivas, no pueden conmutarse satisfactoriamente a frecuencias
mayores de 1 Khz, en tanto que las celdas fotovoltaicas pueden conmutarse con éxito a
frecuencias de hasta unos 100 Khz, y a veces más.
C. AMPLIFICADORES OPERACIONALES.
• DEFINICIÓN
Un amplificador operacional, u op-amp, es un amplificador diferencial con ganancia
muy alta, con una elevada impedancia de entrada y una impedancia de salida baja. Los usos
más típicos del amplificador operacional son proporcionar cambios de amplitud de voltaje
(amplitud y polaridad), osciladores, circuitos de filtros y muchos tipos de circuitos de
instrumentación. Un op-amp contiene varias etapas de amplificador diferencial para lograr
una ganancia muy alta.
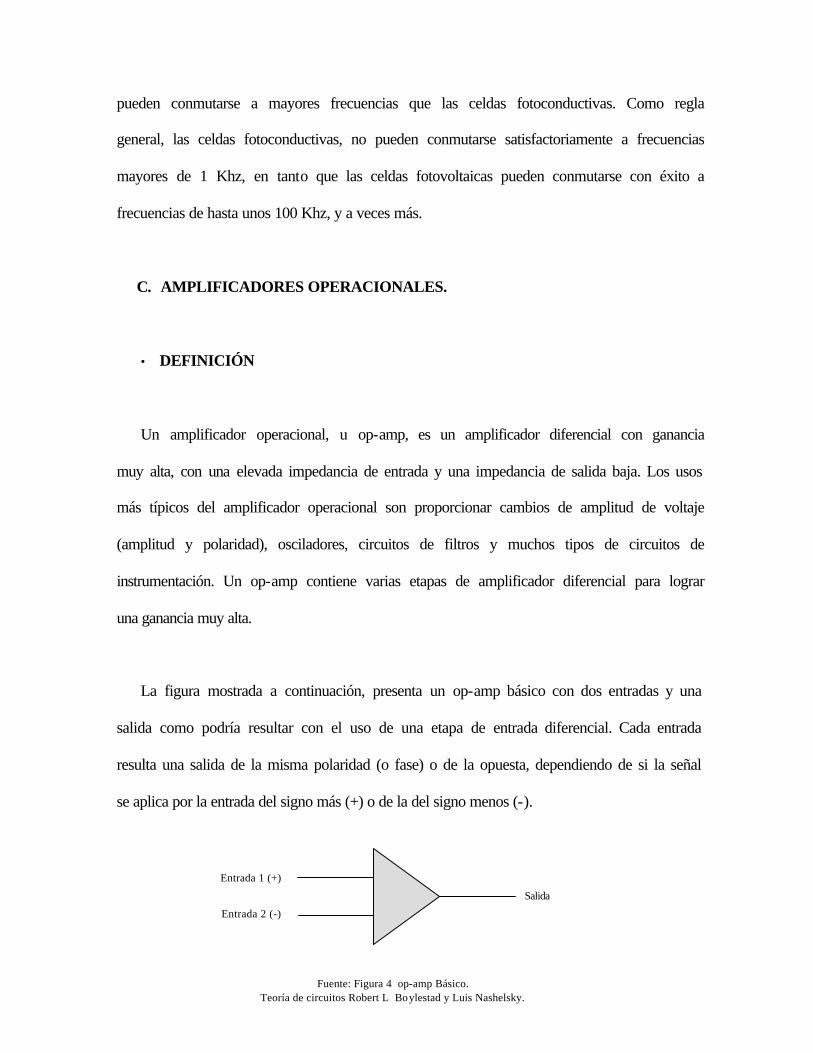
La figura mostrada a continuación, presenta un op-amp básico con dos entradas y una
salida como podría resultar con el uso de una etapa de entrada diferencial. Cada entrada
resulta una salida de la misma polaridad (o fase) o de la opuesta, dependiendo de si la señal
se aplica por la entrada del signo más (+) o de la del signo menos (-).
-
Entrada 1 (+)
Entrada 2 (-)
Salida
Fuente: Figura 4 op-amp Básico. Teoría de circuitos Robert L Boylestad y Luis Nashelsky.
36
• APLICACIONES DE LOS AMPLIFICADORES.
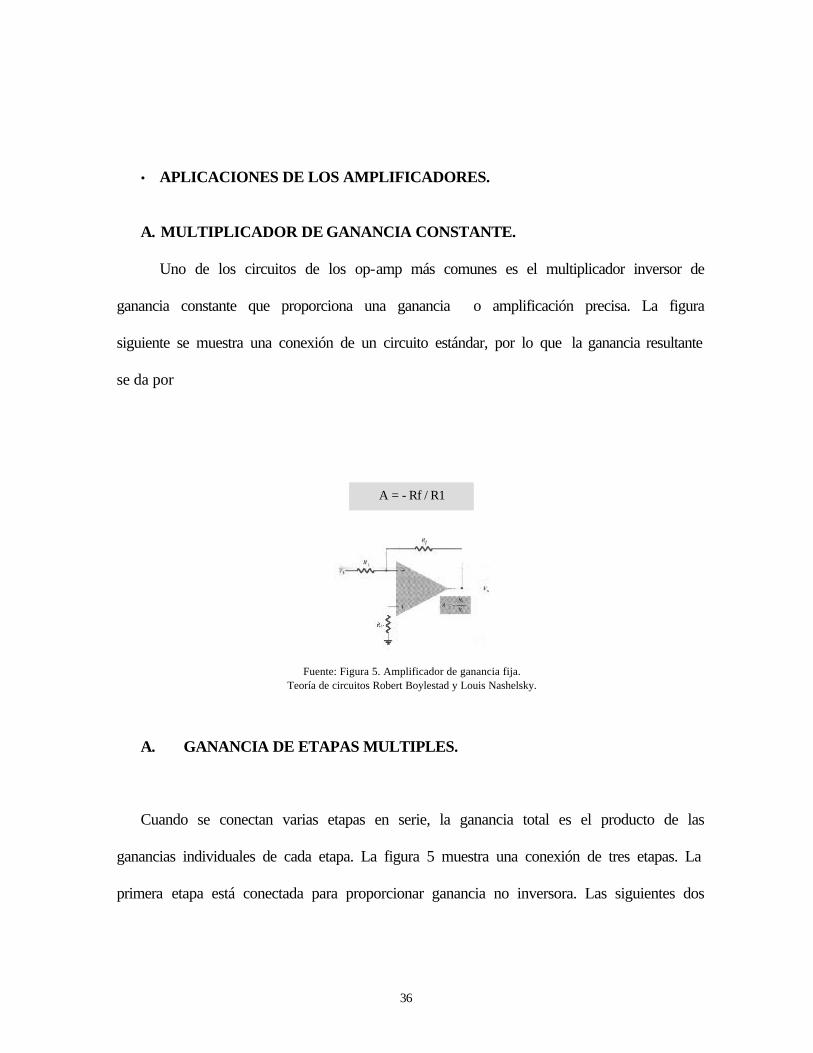
A. MULTIPLICADOR DE GANANCIA CONSTANTE.
Uno de los circuitos de los op-amp más comunes es el multiplicador inversor de
ganancia constante que proporciona una ganancia o amplificación precisa. La figura
siguiente se muestra una conexión de un circuito estándar, por lo que la ganancia resultante
se da por
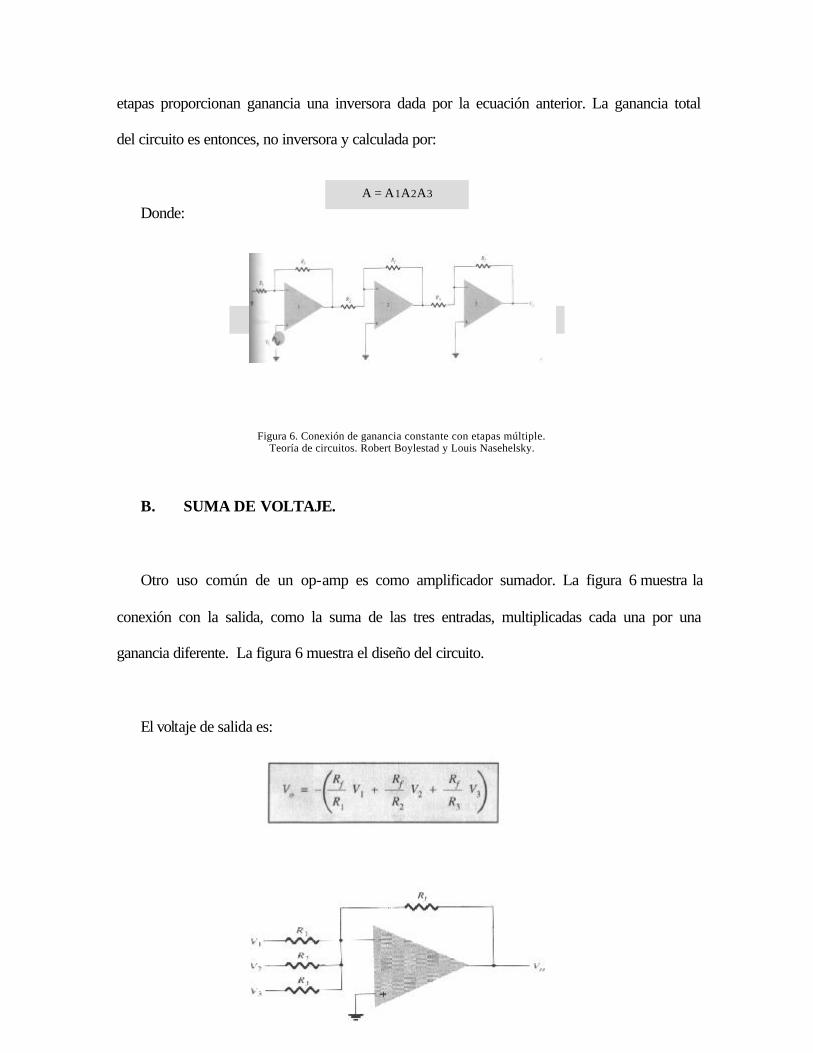
A. GANANCIA DE ETAPAS MULTIPLES.
Cuando se conectan varias etapas en serie, la ganancia total es el producto de las
ganancias individuales de cada etapa. La figura 5 muestra una conexión de tres etapas. La
primera etapa está conectada para proporcionar ganancia no inversora. Las siguientes dos
A = - Rf / R1
Fuente: Figura 5. Amplificador de ganancia fija. Teoría de circuitos Robert Boylestad y Louis Nashelsky.
37
etapas proporcionan ganancia una inversora dada por la ecuación anterior. La ganancia total
del circuito es entonces, no inversora y calculada por:
Donde:
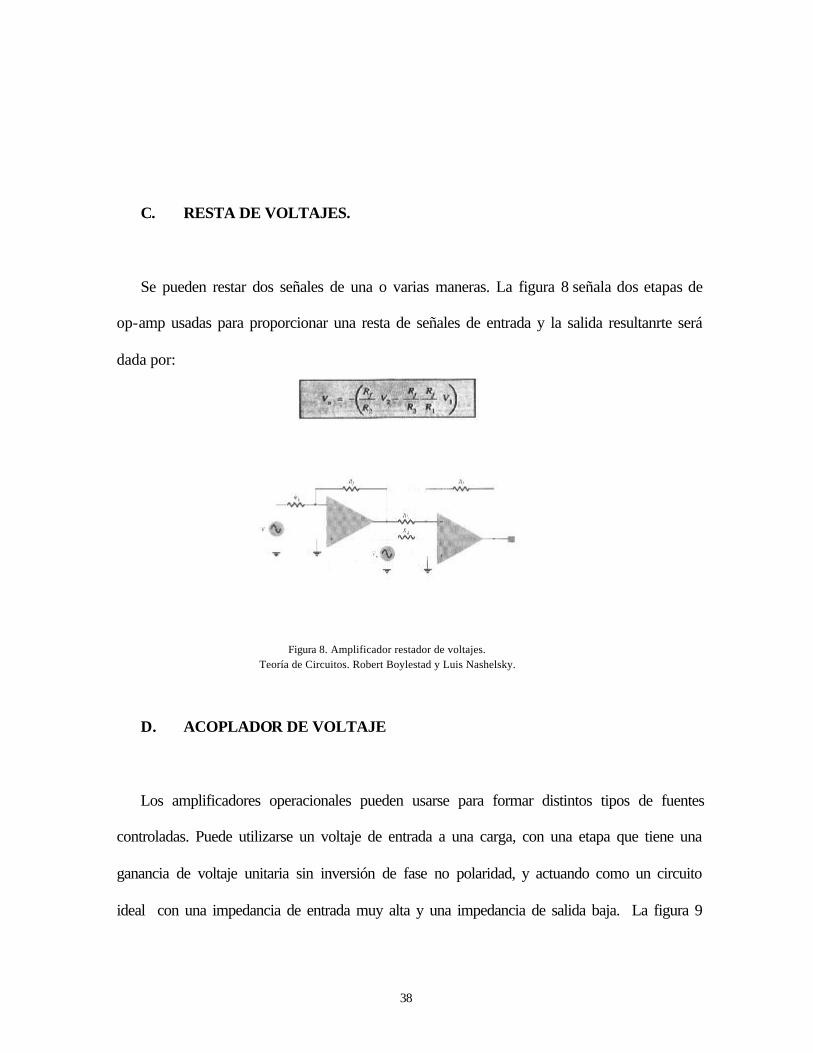
B. SUMA DE VOLTAJE.
Otro uso común de un op-amp es como amplificador sumador. La figura 6 muestra la
conexión con la salida, como la suma de las tres entradas, multiplicadas cada una por una
ganancia diferente. La figura 6 muestra el diseño del circuito.
El voltaje de salida es:
A = A1A2A3
A1 = 1 + Rf / R1, A2 = - Rf / R2 A3 = - Rf / R 3
Figura 6. Conexión de ganancia constante con etapas múltiple. Teoría de circuitos. Robert Boylestad y Louis Nasehelsky.
38
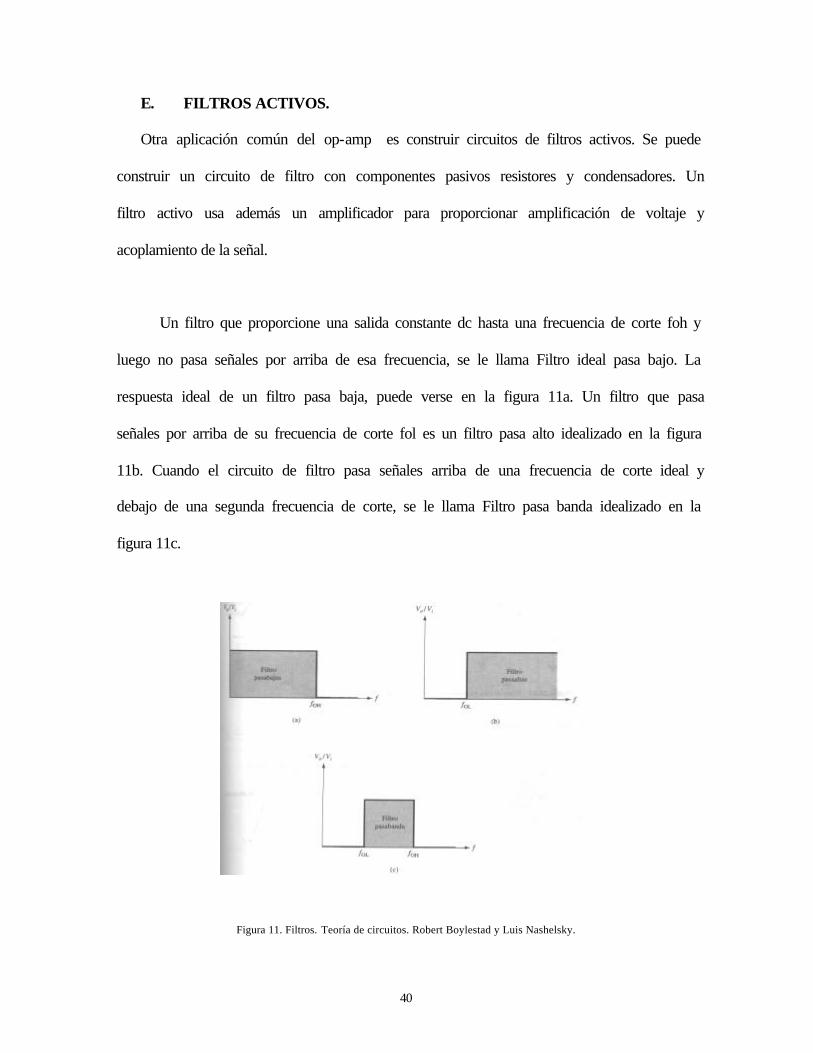
C. RESTA DE VOLTAJES.
Se pueden restar dos señales de una o varias maneras. La figura 8 señala dos etapas de
op-amp usadas para proporcionar una resta de señales de entrada y la salida resultanrte será
dada por:
D. ACOPLADOR DE VOLTAJE
Los amplificadores operacionales pueden usarse para formar distintos tipos de fuentes
controladas. Puede utilizarse un voltaje de entrada a una carga, con una etapa que tiene una
ganancia de voltaje unitaria sin inversión de fase no polaridad, y actuando como un circuito
ideal con una impedancia de entrada muy alta y una impedancia de salida baja. La figura 9
Figura 8. Amplificador restador de voltajes. Teoría de Circuitos. Robert Boylestad y Luis Nashelsky.

39
muestra un op-amp conectado para proporcionar esta operación de un amplificador
acoplador. El voltaje de salida se calcula por:
La figura 10, muestra como puede proporcionarse una señal de entrada a dos salidas
separadas. La ventaja de esta conexión, es que la carga conectada a una salida no tiene
efecto en la otra salida. En efecto, las salidas están acopladas o aisladas cada una de la otra.
Vo = V1
Figura 9. Amplificador ganancia unitaria (Acoplador). Teoría de circuitos. Robert Boylestad y Luis Nashelsky.
Figura 10. Amplificador acoplador para proporcionar señales de salida.Teoría de circuitos. Robert Boylestad y Luis Nashelsky.
40
E. FILTROS ACTIVOS.
Otra aplicación común del op-amp es construir circuitos de filtros activos. Se puede
construir un circuito de filtro con componentes pasivos resistores y condensadores. Un
filtro activo usa además un amplificador para proporcionar amplificación de voltaje y
acoplamiento de la señal.
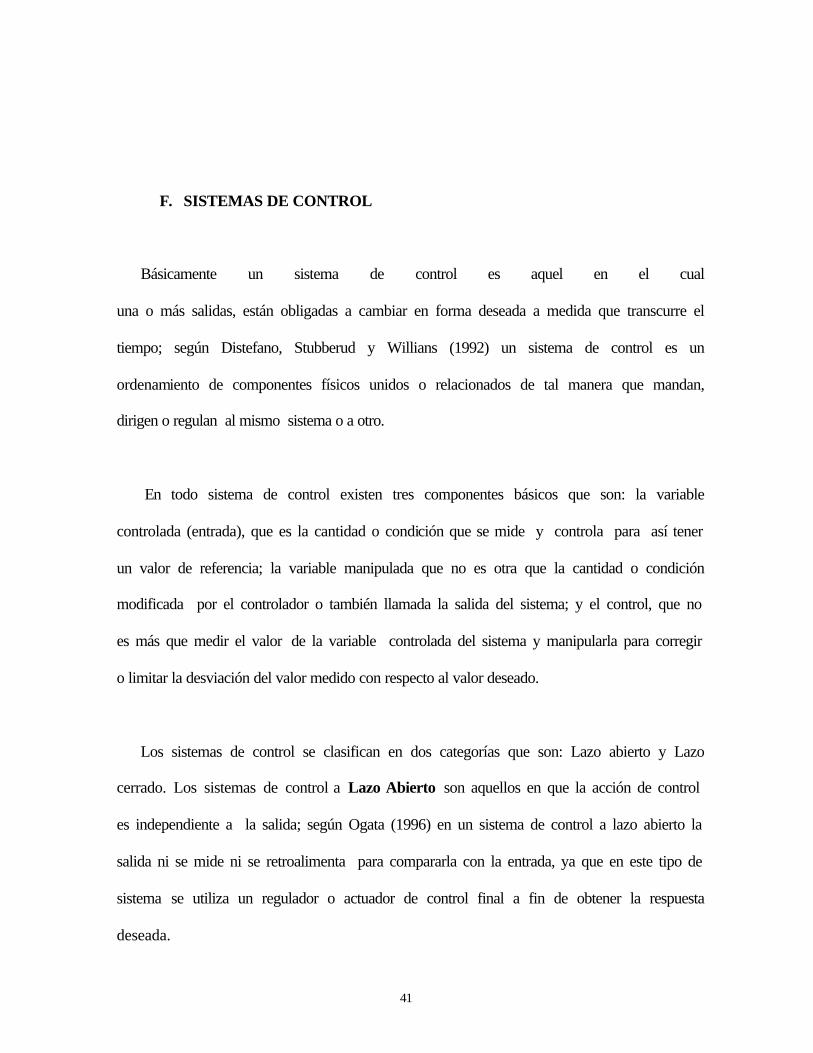
Un filtro que proporcione una salida constante dc hasta una frecuencia de corte foh y
luego no pasa señales por arriba de esa frecuencia, se le llama Filtro ideal pasa bajo. La
respuesta ideal de un filtro pasa baja, puede verse en la figura 11a. Un filtro que pasa
señales por arriba de su frecuencia de corte fol es un filtro pasa alto idealizado en la figura
11b. Cuando el circuito de filtro pasa señales arriba de una frecuencia de corte ideal y
debajo de una segunda frecuencia de corte, se le llama Filtro pasa banda idealizado en la
figura 11c.
Figura 11. Filtros. Teoría de circuitos. Robert Boylestad y Luis Nashelsky.
41
F. SISTEMAS DE CONTROL
Básicamente un sistema de control es aquel en el cual
una o más salidas, están obligadas a cambiar en forma deseada a medida que transcurre el
tiempo; según Distefano, Stubberud y Willians (1992) un sistema de control es un
ordenamiento de componentes físicos unidos o relacionados de tal manera que mandan,
dirigen o regulan al mismo sistema o a otro.
En todo sistema de control existen tres componentes básicos que son: la variable
controlada (entrada), que es la cantidad o condición que se mide y controla para así tener
un valor de referencia; la variable manipulada que no es otra que la cantidad o condición
modificada por el controlador o también llamada la salida del sistema; y el control, que no
es más que medir el valor de la variable controlada del sistema y manipularla para corregir
o limitar la desviación del valor medido con respecto al valor deseado.
Los sistemas de control se clasifican en dos categorías que son: Lazo abierto y Lazo
cerrado. Los sistemas de control a Lazo Abierto son aquellos en que la acción de control
es independiente a la salida; según Ogata (1996) en un sistema de control a lazo abierto la
salida ni se mide ni se retroalimenta para compararla con la entrada, ya que en este tipo de
sistema se utiliza un regulador o actuador de control final a fin de obtener la respuesta
deseada.
42
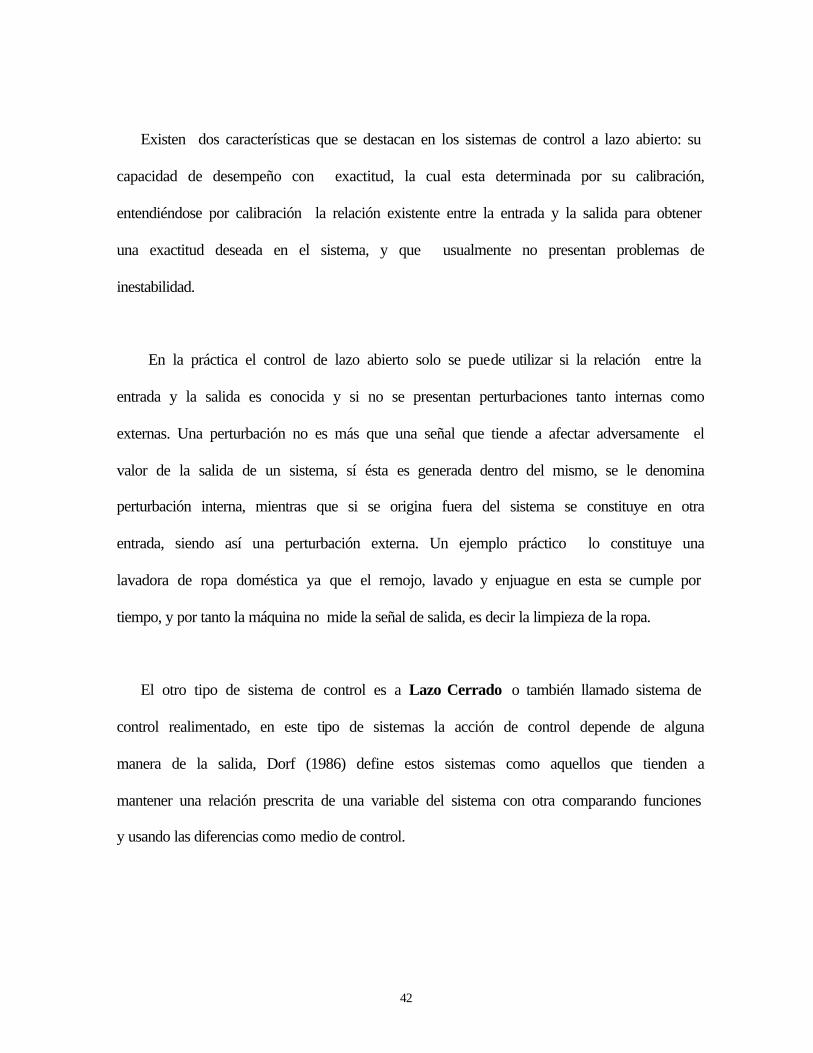
Existen dos características que se destacan en los sistemas de control a lazo abierto: su
capacidad de desempeño con exactitud, la cual esta determinada por su calibración,
entendiéndose por calibración la relación existente entre la entrada y la salida para obtener
una exactitud deseada en el sistema, y que usualmente no presentan problemas de
inestabilidad.
En la práctica el control de lazo abierto solo se puede utilizar si la relación entre la
entrada y la salida es conocida y si no se presentan perturbaciones tanto internas como
externas. Una perturbación no es más que una señal que tiende a afectar adversamente el
valor de la salida de un sistema, sí ésta es generada dentro del mismo, se le denomina
perturbación interna, mientras que si se origina fuera del sistema se constituye en otra
entrada, siendo así una perturbación externa. Un ejemplo práctico lo constituye una
lavadora de ropa doméstica ya que el remojo, lavado y enjuague en esta se cumple por
tiempo, y por tanto la máquina no mide la señal de salida, es decir la limpieza de la ropa.
El otro tipo de sistema de control es a Lazo Cerrado o también llamado sistema de
control realimentado, en este tipo de sistemas la acción de control depende de alguna
manera de la salida, Dorf (1986) define estos sistemas como aquellos que tienden a
mantener una relación prescrita de una variable del sistema con otra comparando funciones
y usando las diferencias como medio de control.
43
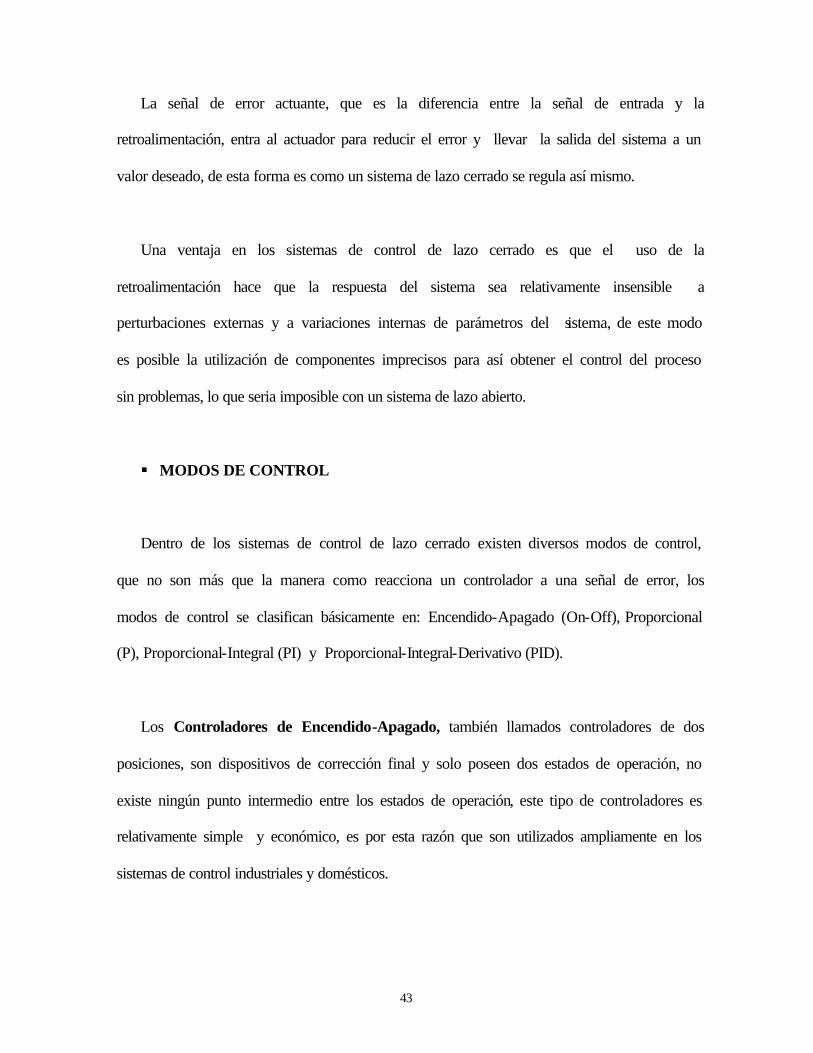
La señal de error actuante, que es la diferencia entre la señal de entrada y la
retroalimentación, entra al actuador para reducir el error y llevar la salida del sistema a un
valor deseado, de esta forma es como un sistema de lazo cerrado se regula así mismo.
Una ventaja en los sistemas de control de lazo cerrado es que el uso de la
retroalimentación hace que la respuesta del sistema sea relativamente insensible a
perturbaciones externas y a variaciones internas de parámetros del sistema, de este modo
es posible la utilización de componentes imprecisos para así obtener el control del proceso
sin problemas, lo que seria imposible con un sistema de lazo abierto.
§ MODOS DE CONTROL
Dentro de los sistemas de control de lazo cerrado existen diversos modos de control,
que no son más que la manera como reacciona un controlador a una señal de error, los
modos de control se clasifican básicamente en: Encendido-Apagado (On-Off), Proporcional
(P), Proporcional-Integral (PI) y Proporcional-Integral-Derivativo (PID).
Los Controladores de Encendido-Apagado, también llamados controladores de dos
posiciones, son dispositivos de corrección final y solo poseen dos estados de operación, no
existe ningún punto intermedio entre los estados de operación, este tipo de controladores es
relativamente simple y económico, es por esta razón que son utilizados ampliamente en los
sistemas de control industriales y domésticos.
44
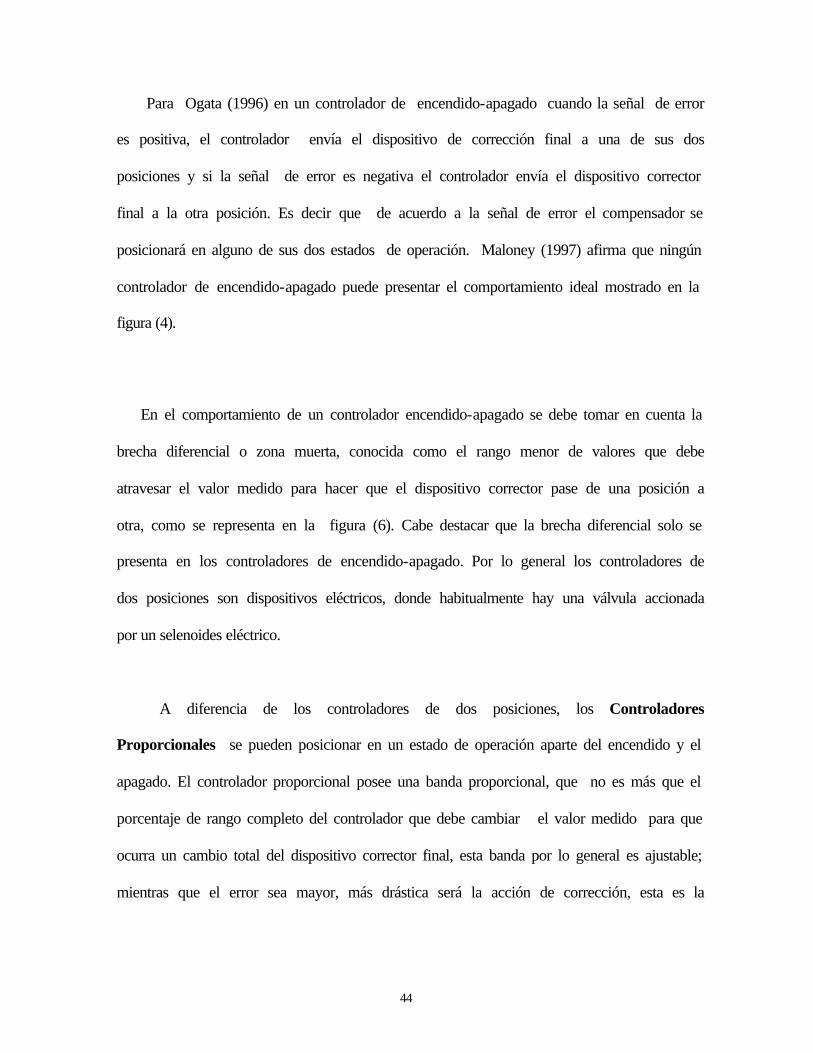
Para Ogata (1996) en un controlador de encendido-apagado cuando la señal de error
es positiva, el controlador envía el dispositivo de corrección final a una de sus dos
posiciones y si la señal de error es negativa el controlador envía el dispositivo corrector
final a la otra posición. Es decir que de acuerdo a la señal de error el compensador se
posicionará en alguno de sus dos estados de operación. Maloney (1997) afirma que ningún
controlador de encendido-apagado puede presentar el comportamiento ideal mostrado en la
figura (4).
En el comportamiento de un controlador encendido-apagado se debe tomar en cuenta la
brecha diferencial o zona muerta, conocida como el rango menor de valores que debe
atravesar el valor medido para hacer que el dispositivo corrector pase de una posición a
otra, como se representa en la figura (6). Cabe destacar que la brecha diferencial solo se
presenta en los controladores de encendido-apagado. Por lo general los controladores de
dos posiciones son dispositivos eléctricos, donde habitualmente hay una válvula accionada
por un selenoides eléctrico.
A diferencia de los controladores de dos posiciones, los Controladores
Proporcionales se pueden posicionar en un estado de operación aparte del encendido y el
apagado. El controlador proporcional posee una banda proporcional, que no es más que el
porcentaje de rango completo del controlador que debe cambiar el valor medido para que
ocurra un cambio total del dispositivo corrector final, esta banda por lo general es ajustable;
mientras que el error sea mayor, más drástica será la acción de corrección, esta es la
45
diferencia esencial que existe entre el controlador proporcional y el controlador de dos
estados.
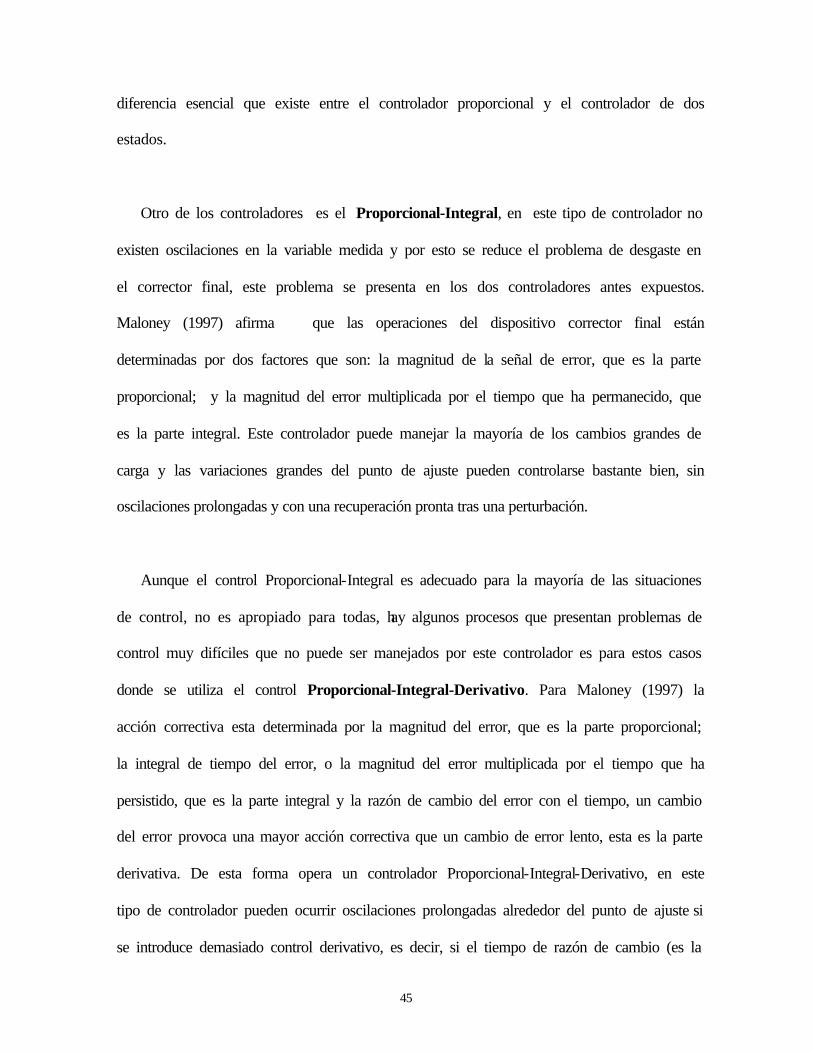
Otro de los controladores es el Proporcional-Integral, en este tipo de controlador no
existen oscilaciones en la variable medida y por esto se reduce el problema de desgaste en
el corrector final, este problema se presenta en los dos controladores antes expuestos.
Maloney (1997) afirma que las operaciones del dispositivo corrector final están
determinadas por dos factores que son: la magnitud de la señal de error, que es la parte
proporcional; y la magnitud del error multiplicada por el tiempo que ha permanecido, que
es la parte integral. Este controlador puede manejar la mayoría de los cambios grandes de
carga y las variaciones grandes del punto de ajuste pueden controlarse bastante bien, sin
oscilaciones prolongadas y con una recuperación pronta tras una perturbación.
Aunque el control Proporcional-Integral es adecuado para la mayoría de las situaciones
de control, no es apropiado para todas, hay algunos procesos que presentan problemas de
control muy difíciles que no puede ser manejados por este controlador es para estos casos
donde se utiliza el control Proporcional-Integral-Derivativo. Para Maloney (1997) la
acción correctiva esta determinada por la magnitud del error, que es la parte proporcional;
la integral de tiempo del error, o la magnitud del error multiplicada por el tiempo que ha
persistido, que es la parte integral y la razón de cambio del error con el tiempo, un cambio
del error provoca una mayor acción correctiva que un cambio de error lento, esta es la parte
derivativa. De esta forma opera un controlador Proporcional-Integral-Derivativo, en este
tipo de controlador pueden ocurrir oscilaciones prolongadas alrededor del punto de ajuste si
se introduce demasiado control derivativo, es decir, si el tiempo de razón de cambio (es la
46
cantidad de tiempo permitida para que la variable medida cambie a través de su rango
completo del controlador) está ajustado demasiado alto.
F. SOFTWARE
Las operaciones que se deben realizar son especificadas por una lista de
instrucciones llamadas programas, o software. El software se divide en dos grandes grupos:
Software del sistema y Software de las aplicaciones.
El software del sistema es el conjunto de programas indispensables para que la
máquina funcione, se denomina también programa del sistema. Estos programas son el
sistema operativo, editores de texto, compiladores, intérpretes (lenguajes de programación)
y los programas de utilidad. Mientras que el software de aplicación, son los que realizan las
tareas concretas para el trabajo que se busca hacer.
Un ordenador por sí solo no sirve para nada, si no dispone de un programa, el alma
que lo mueva e indique paso a paso lo que ha de ir realizando.
Por su parte Chapran y Canale (1989) afirman que un Software son las instrucciones y
programas necesarios para dirigir a la computadora en una tarea específica. Este programa
es un conjunto de instrucciones que entiende el ordenador elaborado concienzudamente por
47
un hombre, un programador; una vez arrancado, el ordenador irá estructurando de una en
una todas las instrucciones, ejecutándolas a velocidad inconmensurable para la mente
humana.
Los tiempos de ejecución, usados en la informática, son del orden del microsegundo,
aunque los circuitos electrónicos que los componen son capaces de operar en
nanosegundos. Esto da idea de las enormes velocidades a las que operan estas máquinas, y
aun así pueden tardar minutos y a veces horas en procesar una pila de datos.
El programa es cargado previamente en la memoria en donde también se pueden
introducir los datos a procesar. Procesar es ejecutar un programa para mover u operar unos
datos. Una vez arrancado el ordenador, este va a la dirección de comienzo, en donde tiene
que haber sido cargada la primera instrucción del programa, le seguirán todas las demás. El
ordenador las irá ejecutando únicamente de manera secuencial hasta el final del programa,
en donde el ordenador se detendrá o se quedara dando vueltas en un bucle final en espera
de instrucción.
El software se clasifica en: software de aplicación y software del sistema. El Software
de Aplicación tiene un propósito específico, por ejemplo. Software de contabilidad,
nómina, facturación, procesamiento de texto, etc.; mientras que el Software del Sistema es
el que auxilia en la creación, modificación y ejecución del Software de aplicación, por
ejemplo: el software operativo, este un software que establece la comunicación entre los
componentes del hardware y el resto del software, su función principal es administrar el
funcionamiento del hardware según las órdenes dadas por algún software.
48
En software se entiende por Lenguaje a aquellas reglas establecidas que permiten la
comunicación entre hombre máquina u ordenador, el hombre sólo es capaz de manejar y
entender palabras representativas, signos y conceptos; mientras que un ordenador lo único
que entiende, interpreta y opera son series de ceros y unos lógicos, por tanto, falta un medio
por el cual ambos se entiendan entre sí, sin cambiar su manera de operar, esto se consigue
con los diferentes lenguajes que existen, desde el mas elemental, como lo es el lenguaje
máquina o de bajo nivel (muy próximo a ceros y unos), hasta el mas complejo llamado
lenguaje de alto nivel.
Los lenguajes bajo y alto nivel son antagónicos en cuanto a su finalidad, porque
mientras un programa establecido en código máquina, resulta fácil y rápido para el
ordenador al tiempo que ocupa el espacio de memoria imprescindible para el programador
le resulta su confección engorrosa y lenta, al contrario un lenguaje de alto nivel es cómodo
y fácil de utilizar para el programador, pero lento y complejo y ocupando mucha más
memoria para el ordenador; esta contrariedad hace que, según las aplicaciones, se utilice un
lenguaje u otro.
Se pueden establecer tres niveles básicos, en los cuales se encuentran todo el repertorio
de lenguajes que existen en la actualidad y son: los lenguajes de código de máquina, los
lenguajes ensambladores y los lenguajes de alto nivel.
Para Bores y Rosales (1993), el Lenguaje de Bajo Nivel es aquel que utiliza vocablos
directamente entendibles para el CPU de la computadora. Este es el más elemental, pero el
49
mas complicado de utilizar, es el que el ordenador entiende directamente, y posee para sus
instrucciones códigos hexadecimales que son específicos de este ordenador o
microprocesador, lo cual los incompatibiliza entre sí. Solo se trabaja en código máquina
con algunos periféricos que disponen de algún repertorio específico de comando o en
sistemas elementales basados en microprocesador; no es muy aconsejable su uso debido a
la complejidad de su utilización. Por otra parte la mayoría de los sistemas que disponen de
otro lenguaje no admiten operar en código máquina directamente, todos los lenguajes
superiores al final ha den ser transformados en código máquina para ser introducidos en
memoria, ya que este es el único lenguaje que entienden los ordenadores, aunque este paso
de conversión no lo efectúa el ordenador, sino el propio sistema que dispone de un
firmware adecuado para este fin, naturalmente que esta conversión forma parte del
ensamblado del programa y se efectúa cuando el programador, tras haber confeccionado el
programa y haberlo introducido en el ordenador da la orden de ensamblaje. Si se desea
operar con él hay que entender previamente a fondo el microprocesador que se va a utilizar
ya que cada bit de cada instrucción tiene un significado concreto y es muy fácil
equivocarse, dando lugar a que a la hora de ordenar el arranque de nuestro programa este se
pierda en cualquier punto.
El assembler o Lenguaje Ensamblador es un tipo de lenguaje intermedio entre los
lenguajes de alto y bajo nivel en que opera todo microordenador y al cual habrá que
convertir los dos anteriores como paso final previo a su introducción en memoria para
hacerlo correr o funcionar cuantas veces sea preciso. Cada microordenador tiene su propio
lenguaje assembler, que esta en relación directa a la estructura del microprocesador
empleado en su CPU y por ende de las instrucciones propias del mismo; debido a que cada
50
microordenador tiene su assembler específico, los distintos lenguajes ensambladores, de los
distintos sistemas que existen comercialmente no son compatibles entre sí en modo alguno,
pese a que emplean instrucciones con idéntico cometido y hasta la misma filosofía de
funcionamiento, en este punto la incompatibilidad se asemeja en lenguaje ensamblador y en
lenguaje máquina.
Para programar un microordenador en lenguaje máquina resulta, una labor ardua y
propensa al error; por ello, un escalón inmediatamente superior lo ocupa el lenguaje
assembler, en esencia se asemeja al lenguaje máquina; pero con una serie de
imprescindibles sofisticaciones que los hacen práctico, con la ventaja de seguir ocupando
un mínimo de memoria. Cada lenguaje ensamblador emplea básicamente las mismas
instrucciones que el microprocesador de la CPU, solo que el programador no emplea su
correspondencia en hexadecimal, como sé hacia en el lenguaje máquina, sino los
mnemotécnicos de dichas instrucciones, esto resulta más cómodo de manejar, ya que se
parecen al lenguaje humano que se esta acostumbrado a usar, claro que estas instrucciones
vienen expresadas en ingles.
El programador de assembler no puede prescindir totalmente del hexadecimal, que le va
a aparecer como un dato, como una dirección efectiva y sobre todo cuando haya que
manejar bits, como en las instrucciones referidas al status en que cada uno de ellos tienen
un significado propio o en las instrucciones lógicas. Descontando estas excepciones los
distintos lenguajes assembler están concebido para no tener que recurrir al hexadecimal, o
al menos lo menos imprescindible.
51
En los lenguajes ensambladores cada mnemotécnicos y cada símbolo gráfico tienen
lenguajes muy concretos, que tras una fase posterior, al ser introducidos el programa en
memoria, será correctamente transformado en su código máquina en hexadecimal. En este
lenguaje los Labels o etiquetas asumen un papel transcendental, ya que son usados para
efectuar los saltos o bifurcaciones típicas de cada programa como consecuencia de una
decisión, estas etiquetas están representando direcciones efectivas de programas a las cuales
serán convertidas cuando el programa haya sido convertido, tras un paso posterior de carga
en memoria; las etiquetas pueden estar representadas por cualquier nombre que les
atribuya el programador, solo que generalmente hacen referencia al nombre del proceso al
cual se refiere y por su puesto, pueden ser tanto un código caprichoso como un nombre en
español.
El Lenguaje Assembler o Ensamblador no es de los más populares en el mundo de la
microinformática ello se debe a que al ser un lenguaje próximo al microprocesador, es
laborioso de confeccionar, requiriéndose frecuentemente el conocimiento del mismo, al
menos en el ámbito funcional así como de sus registros internos; por lo que ha quedado
relegado prácticamente al uso de los profesionales que necesitan operar frecuentemente
muy próximos al hardware, como es, por ejemplo, en la puesta a punto de equipos
electrónicos complejos, reparaciones, entre otros. para lo cual se auxilian de
microordenadores que admitan assembler.
El último nivel de los lenguajes lo ocupa los lenguajes de alto nivel, la utilización de
un lenguaje de alto nivel reduce los costos de programación e incrementa la fiabilidad del
software, simplifica el mantenimiento y documentación de los programas si lo
52
comparamos con la utilización del lenguaje de bajo nivel y lenguaje assembler. Bores y
Rosales (1993) definen el lenguaje de alto nivel como vocablos parecidos al leguaje
humano pero ininteligibles para el CPU, por lo cual debe ser traducido a un leguaje
computacional de bajo nivel. Este tipo de lenguaje recibe el nombre de alto nivel porque su
sistema de programación esta a la altura misma del lenguaje conceptual, matemático y de
organización del propio hombre; por otra parte este nombre también hace referencia al alto
volumen de memoria que es preciso ocupar para la adecuación del lenguaje de un
ordenador, sencillo en sí mismo en cuanto a su forma, al lenguaje complicado y a menudo
abstracto del programador. Otra ventaja importante que posee este tipo de lenguaje es la
facilidad de aprendizaje y soltura posterior, sin que el conocimiento del hardware sea
imprescindible, aunque este último conlleve a la utilización de una jerga específica en los
programas de alto nivel.
§ PROGRAMACIÓN ESTRUCTURADA
Es un término general que se refiere a un tipo de programación que produce código con
un flujo limpio, un diseño claro y un cierto grado de modularidad o de estructura jerárquica.
Entre los beneficios de la programación estructurada se encuentran la facilidad de
mantenimiento y la legibilidad por parte de otros programadores. La idea central de la
programación estructurada es darle al programador una herramienta y una metodología para
que pueda enfrentar la solución de cualquier problema de manera exitosa sin tener que
recurrir al procedimiento de ensayo y error.
53
El principio fundamental en el cual se basa la programación estructurada parte de la
idea lógica de que la mejor manera de obtener programas correctos (libres de errores) es la
de no introducir estos errores desde el comienzo. Al desarrollar un programa se dedica
tiempo en el chequeo y corrección de los errores introducidos fundamentalmente en las
primeras etapas del proceso, principalmente en el análisis lógico y diseño del programa, es
importante reducir estos errores para así minimizar el tiempo de corrección del programa,
con una ganancia en confiabilidad y seguridad sobre su correcto funcionamiento (Marquez,
J. 1992:62).
G. OBRAS CINÉTICAS
Debe destacarse que debido al gran auge y éxito que ha tenido el artista Carlos Cruz
Diez, nos basaremos precisamente en sus obras para la laboración de este proyecto. Todo el
material para el desarrollo de este punto, fue extraído del tomo de 25 Aniversario Carlos
Cruz Diez encontrado en el Museo Contemporáneo del Zulia e información bajada de
internet.
§ El Color
Ha descrito Cruz Diez en su reflexión sobre el color “intento desvincular el color de
la forma y sólo he podido hacerlo evidente trabajando al límite de la visión normal”. Este
breve párrafo resume conceptualmente su trabajo de artista por más de cuarenta años, el
cual ha desarrollado explorando todas las posibilidades de lo visual a través de una obra
extensa, expresada en múltiples fasetas, que ha podido insertar satisfactoriamente en el gran
escenario internacional de las artes visuales.
54
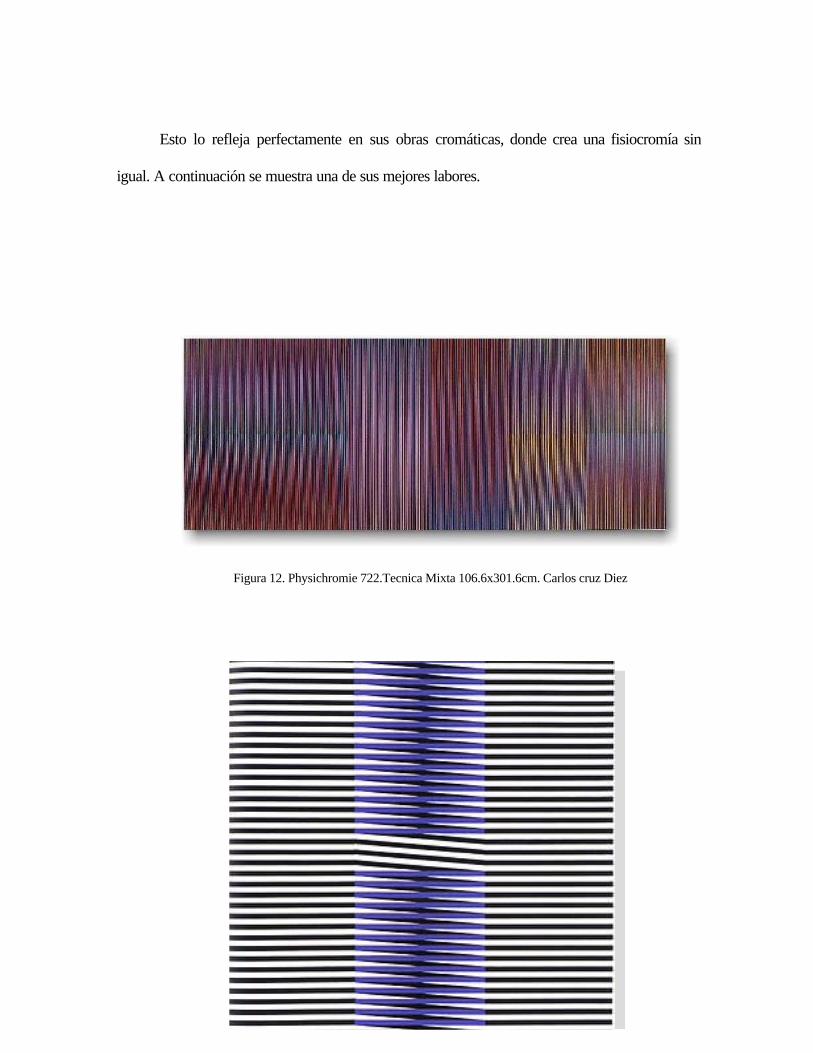
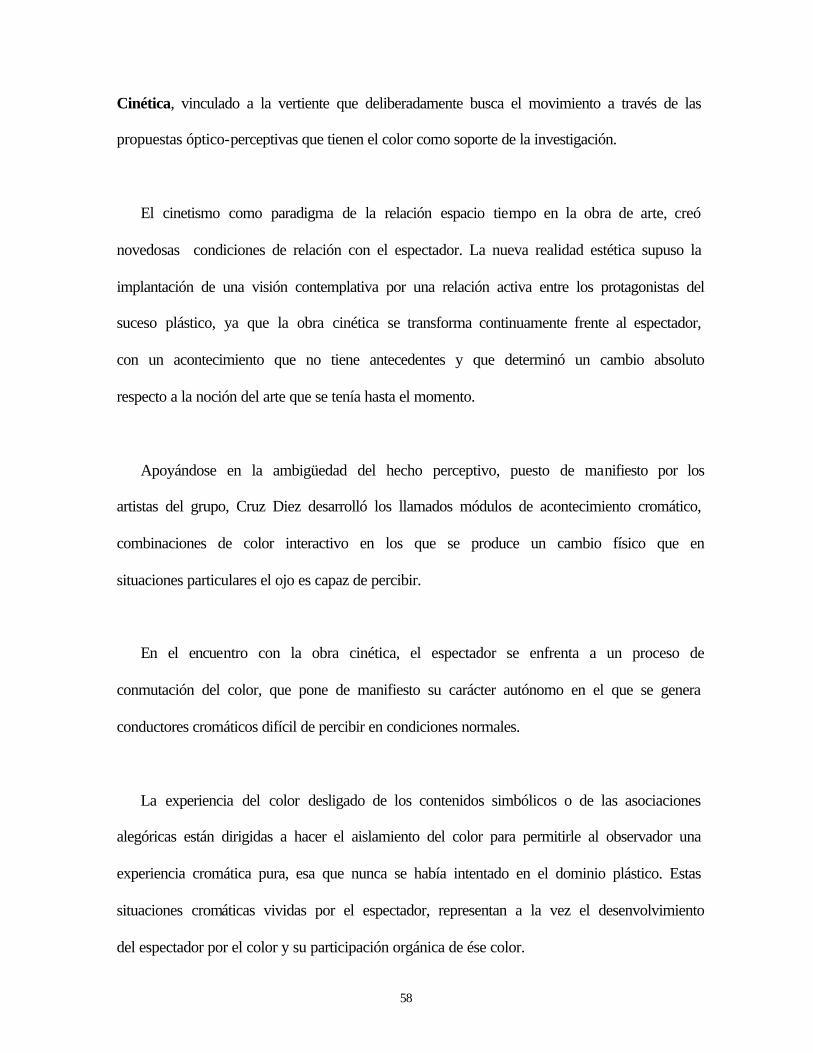
Esto lo refleja perfectamente en sus obras cromáticas, donde crea una fisiocromía sin
igual. A continuación se muestra una de sus mejores labores.
Figura 12. Physichromie 722.Tecnica Mixta 106.6x301.6cm. Carlos cruz Diez
55
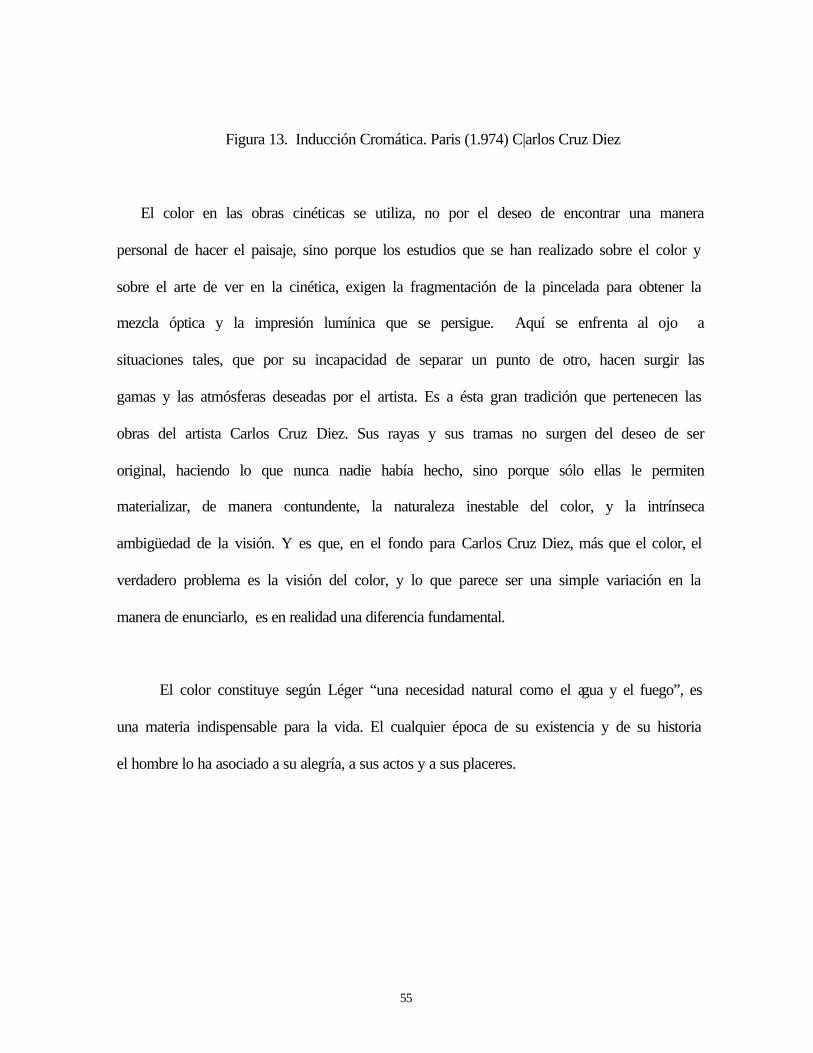
Figura 13. Inducción Cromática. Paris (1.974) C|arlos Cruz Diez
El color en las obras cinéticas se utiliza, no por el deseo de encontrar una manera
personal de hacer el paisaje, sino porque los estudios que se han realizado sobre el color y
sobre el arte de ver en la cinética, exigen la fragmentación de la pincelada para obtener la
mezcla óptica y la impresión lumínica que se persigue. Aquí se enfrenta al ojo a
situaciones tales, que por su incapacidad de separar un punto de otro, hacen surgir las
gamas y las atmósferas deseadas por el artista. Es a ésta gran tradición que pertenecen las
obras del artista Carlos Cruz Diez. Sus rayas y sus tramas no surgen del deseo de ser
original, haciendo lo que nunca nadie había hecho, sino porque sólo ellas le permiten
materializar, de manera contundente, la naturaleza inestable del color, y la intrínseca
ambigüedad de la visión. Y es que, en el fondo para Carlos Cruz Diez, más que el color, el
verdadero problema es la visión del color, y lo que parece ser una simple variación en la
manera de enunciarlo, es en realidad una diferencia fundamental.
El color constituye según Léger “una necesidad natural como el agua y el fuego”, es
una materia indispensable para la vida. El cualquier época de su existencia y de su historia
el hombre lo ha asociado a su alegría, a sus actos y a sus placeres.
56
§ Arte Cinético
La permanencia del color como valor formal, o su referencia como soporte conceptual
en la práctica contemporánea, parte de variables culturales y consideraciones estéticas
distintas a las que han manejado los artistas con el pasado. Para su estudio o análisis, no
sólo como elemento vinculado a las artes, sino como realidad física asociada a los procesos
de percepción y a la respuesta de tipo sensorial que se dan en el espectador, es fundamental,
el corte que la historiografía del arte ha fijado en el impresionismo. Ella ha centrado sus
intereses en este movimiento, como punto de partida de todos los cambios importantes
ocurridos en el ámbito de las artes visuales, entre finales del siglo XIX y las primeras
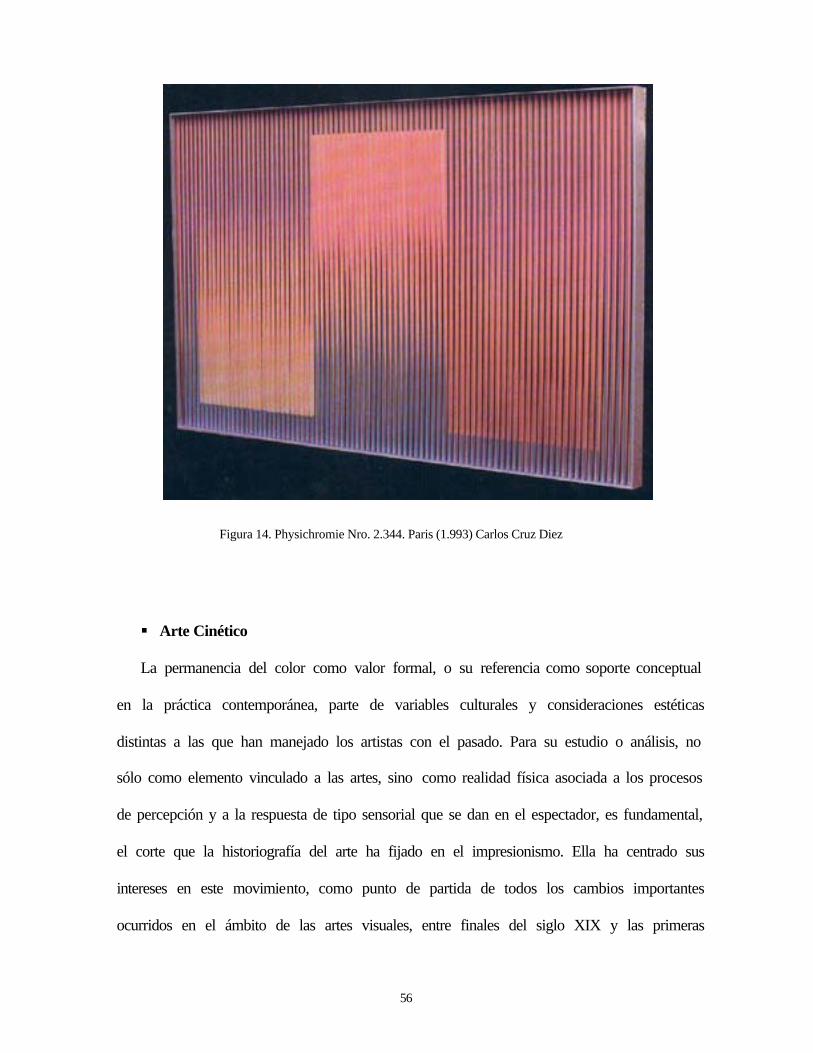
Figura 14. Physichromie Nro. 2.344. Paris (1.993) Carlos Cruz Diez
57
décadas del siglo XX. No obstante la claridad que se tiene en cuanto a este movimiento fue
el último de los grandes sucesos plásticos vinculados al renacimiento.
Con el impresionismo se inicia una nueva manera de ver y usar el color que tendrá
significativas consecuencias en los acontecimientos posteriores de las artes plásticas. En el
proceso cuentan esencialmente los descubrimientos científicos de la época.
Las leyes de los primarios, secundarios y del contraste simultáneo, son algunos de los
nuevos recursos puestos al servicio de los creadores impresionistas. Sin embargo, sus
estudios y proporciones en torno al color, apuntan fundamentalmente a las representaciones
más exactas, más fiel, más fidelignas que se hayan buscado hasta entonces de la realidad.
No en balde los impresionistas tienen en Manet y en realistas como Courbet a sus
principales y más auténticos precursores. Los impresionistas llegan, por esa necesidad de
registrar la fugacidad de un instante al parpadeo de un rayo de luz, la variación de las
formas-color en presencia de la cambiante luminosidad a la disolución de la forma, a los
límites mismos del abstraccionismo, aunque sin alcanzar librarse del dominio de la realidad
sensible.
Cruz Diez realiza de una manera muy original lo que los pintores del siglo XX han
reivindicado en sus teorías sin aún llevar a cabo en sus obras, a saber, el color que no
reconoce fijaciones pero que siempre entabla nuevas relaciones, continuamente cambiantes
con la ley. En este proceso de definir una manera de explorar las posibilidades del color,
distinta de la establecida por la tradición, es donde se incorpora activamente la propuesta
58
Cinética, vinculado a la vertiente que deliberadamente busca el movimiento a través de las
propuestas óptico-perceptivas que tienen el color como soporte de la investigación.
El cinetismo como paradigma de la relación espacio tiempo en la obra de arte, creó
novedosas condiciones de relación con el espectador. La nueva realidad estética supuso la
implantación de una visión contemplativa por una relación activa entre los protagonistas del
suceso plástico, ya que la obra cinética se transforma continuamente frente al espectador,
con un acontecimiento que no tiene antecedentes y que determinó un cambio absoluto
respecto a la noción del arte que se tenía hasta el momento.
Apoyándose en la ambigüedad del hecho perceptivo, puesto de manifiesto por los
artistas del grupo, Cruz Diez desarrolló los llamados módulos de acontecimiento cromático,
combinaciones de color interactivo en los que se produce un cambio físico que en
situaciones particulares el ojo es capaz de percibir.
En el encuentro con la obra cinética, el espectador se enfrenta a un proceso de
conmutación del color, que pone de manifiesto su carácter autónomo en el que se genera
conductores cromáticos difícil de percibir en condiciones normales.
La experiencia del color desligado de los contenidos simbólicos o de las asociaciones
alegóricas están dirigidas a hacer el aislamiento del color para permitirle al observador una
experiencia cromática pura, esa que nunca se había intentado en el dominio plástico. Estas
situaciones cromáticas vividas por el espectador, representan a la vez el desenvolvimiento
del espectador por el color y su participación orgánica de ése color.
59
2. REVISION DE LA LITERATURA
Para la presente investigación, se tomaron en cuenta otros trabajos y proyectos los
cuales fueron desarrollados en diferentes universidades, entre ellos se tienen:
El proyecto robótico SCORPIO fue desarrollado por Estell, Muszynsk, Owen y
Snodgrass en la Universidad de Toledo (1993) su propósito era el desarrollo de un sistema
microcontrolado, para un robot caminante, barato, de pequeña escala donde se fusionaran
Figura 15. Physichromie Nro. 454. Paris 1.969. Carlos Cruz Diez
60
el Hardware y el Software para formar un sistema unificado. Este fin no pudo ser alcanzado
y su único aporte para investigaciones futuras fue el diseño de una estructura funcional,
esta consta de una base metálica y seis patas.
En otro orden de ideas, se encontró el proyecto robótico BORIS. El mismo fue
construido por Gilbertson, R. en 1994. Es el primer robot con la tecnología de músculos de
metal el cual posee un gran potencial para expansiones y adaptaciones en muchas formas.
Boris se mueve con asombrosa fluidez y acciones casi humanas, sus pasos son de un
centímetro de largo y un centímetro de alto, esta conformado por ocho músculos de metal
separado para crear todo el movimiento. Los materiales que se utilizaron para crearlo,
fueron alambres de piano, madera balsa, cartón piedra y láminas plásticas. Las conexiones
de Boris están realizadas con alambres ligeros que llegan a una interface de circuitos que
recibe las señales del PC por un puerto paralelo de impresora, luego operará desde el
teclado del computador con un programa que le pertenece a este.
Además, dentro de los proyectos robóticos se destaca NITLEMITE el cual fue
fabricado por Estell, J en 1997. Este proyecto es similar al de Boris pero con una variante
como lo es la inclusión de los componentes LEGO. Para construir el cuerpo del robot, las
piernas están formadas por un componente hecho de una placa de lego y un componente
vertical hecho de músculos de metal de 0.036 pulgadas. En este robot también se
utilizaron resortes hechos de músculos de metal para lograr una respuesta más rápida en
sus movimientos. Nitlemite sólo posee cuatro patas las cuales únicamente se desplazan
cuando el Nitinol es activado, es controlado por un operador que activa y desactiva la
fuente generadora de corriente quien es la que se encarga de activar al Nitinol.
61
También se tiene el proyecto STIQUITO. Es un robot muy pequeño creado por
Conrod y Mills en 1998, el cual consta de seis patas y fue diseñado como herramienta
educacional para instruir a los estudiantes cómo se debe trabajar con músculos de metal y
para que conozcan la capacidad que tienen estos materiales de crear movimiento a partir de
la electricidad.
Por último, se tiene como proyecto de investigación, el desarrollo de un sistema
robótico basado en el equilibrio estático utilizando músculos de metal, realizado por Espín,
Héctor y Uribe, María en la universidad Dr. Rafael Bellosos Chacín del presente año. En
este trabajo de investigación, se busca crear un movimiento sincronizado a un robot con
forma de araña, sus patas fueron diseñadas con madera, ya que el músculo de metal no
puede ejercer tanta fuerza y requiere por ende, un material sumamente liviano y fácil de
manejar.
3. Definición de términos básicos
Cabe destacar que, las definiciones de estos términos, fueron extraídas del diccionario
enciclopédico Gran Espasa (1998) y de guías extraídas del Museo Contemporáneo del
Zulia.
§ Bus: Vía de comunicación utilizada por los microprocesadores y
microcontroladores.
62
§ Cinético: perteneciente o relativo al movimiento. Es el estudio de las reacciones
químicas en lo que se refiere a sus velocidades.
§ Cromática: Relativo a los colores. Se dice del instrumento óptico que presenta al
ojo los objetos contorneados con los visos y colores del arco iris.
§ Cromosaturación: técnicamente una cromosaturación es una experiencia mediante
la cual se crea de forma artificial un ambiente monocromático que envuelve a quien penetra
en ella. A partir de allí se crea una serie de situaciones ambientales inéditas para la
experiencia humana que reconoce, aún en medio de la oscuridad, a pesar de la verificación
científica que ha demostrado que nuestra consciencia del color es sólo una consecuencia de
la presencia de la luz.
§ Fisiocromía: no es la transposición estética de una emoción previamente
experimentada por el autor y transmitida a posteriori mediante formas y colores que
evocarían y tratarían de restituir el choque emocional recibido; por el contrario, ante
nuestros ojos la obra nace, se agita, vibra, muere y renace. Ante nosotros la luz viene a
mezclarse con los pigmentos y a desempeñar su papel en la metamorfosis de la superficie.
Aquí la obra es el desarrollo de un fenómeno real y actual de la naturaleza, canalizada por
la vigilancia del artista.
63
4. SISTEMAS VARIABLES
A. DEFINICION OPERACIONAL
§ OBRA CINETICA:
Una obra cinética no es solamente la realización de una nueva expresión en el campo de
lo pictórico, por la sencilla razón de que su acción va más allá de la mera contemplación
pasiva del hombre ante la imagen, sino que obliga al espectador, por primera vez en la
historia de la pintura, a integrarse a la obra, formando parte de ella, por medio de su visión
a través del espacio que los separa convirtiéndose, en ese proceso, en parte de la propia
materia de arte.
El hombre se vuelve así factor actuante de la obra, en calidad de elemento plástico, por
medio de su desplazamiento y de su visión. Esta obra cinética no es entonces, la imagen
pictórica que se conocía hasta ahora. Es un concepto artístico tan real y viviente como lo es
el sol en su rotación y movimiento que le revela al hombre, a cada instante, una nueva
valoración del color y de las formas.
Lo fundamental en la expresión de esta obra cinética es principalmente un proceso
visual basado en la alteración que se produce en el color a causa de especiales choques
retinianos, así también como la distancia que existe entre la obra y el espectador y el
desenvolvimiento de éste frente a aquella. Para alcanzar este resultado no sólo es primordial
recurrir a un muy especial tipo de diseño a fin de alcanzar ese efecto retiniano, sino
64
también tomar los conceptos cromáticos y fisiocromáticos para así formular una situación
alternante.
Para crear el movimiento, además de la utilización de los músculos de metal (Nitinol),
se deberá ayudar asociando diversos elementos como la distancia, diseño, formato, colores,
entre otros.
El color como fuente de energía, es sobre lo que trata la obra. La materia cromática en
la que esta basada, puesta a nuevo uso por la sorprendente caja de colores que es el ojo
humano, hace que la retina no solamente siga siendo lo que ya es, sino que se trueque
también en elemento de fusión de nuevos estados sensoriales.

65