-
Processamento de sinais em arranjo de sensores
Lucas Nogueira Ribeiro
Universidade Federal do CearaDepartamento de Engenharia de
Teleinformatica
31 de Marco de 2015
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 1 / 18
-
Sumario
1 Introducao
2 Arranjo Linear Uniforme
3 Arranjo Linear Uniformemente Ponderado
4 Parametros do padrao de radiacao de um arranjo linear
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 1 / 18
-
Introducao
Sensores dispostos em uma reta no espaco consistutem um
arranjolinear.
Um arranjo linear e uniforme (Uniform Linear Array - ULA) se
todosos sensores sao separados pela mesma distancia d.
Figura: Modelo de ULA posicionada no eixo z.
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 2 / 18
-
Introducao
Exemplo de aplicacao de ULAs: arranjo de microfones cancelamento
deinterferencias atraves de formatacao de feixe (beamforming).
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 3 / 18
-
Introducao
Equacoes importantes
Steering vector :
vk(k) =
ejkTp0
...
ejkTpN1
(1)Funcao frequencia-numero de onda do filtro espacial H():
(,k) = HT ()vk(k) (2)
Seja um filtro de pesos complexos wH = HT (). Entao (2)
torna-se:
(,k) = wHvk(k) (3)
No qual k = 2pi [ sin cos , sin sin , cos ]T e o vetor deonda e
pn e o vetor posicao de cada sensor para n = 0, . . . , N 1.L. N.
Ribeiro (UFC) Processamento de sinais em arranjo de sensores 31 de
Marco de 2015 4 / 18
-
Uniform Linear Array (ULA)
Considera-se um arranjo linear disposto no eixo z com N
elementosuniformemente separados pela distancia d, como mostrado na
Fig. 1.
Dessa forma, o vetor posicao do n-esimo sensor possui as
seguintescomponentes:
pxn = pyn = 0 (4)
pzn =
(n N 1
2
)d (5)
para n = 0, . . . , N 1.Objetivo: Derivar as equacoes que
descrevem os arranjos lineares nocenario apresentado acima.
Steering vector e suas propriedadesFuncao frequencia-numero de
onda da sada do filtro espacialPadrao de radiacao do arranjo
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 5 / 18
-
ULA - Steering vector
O n-esimo elemento do steering vector (1) sera
ejkTpn = ej(
2pi )( sin cospxsin sinpycos pz)
= ej2picos (N12 n)d
= ej(N12
n)kzd
Calculando-se todos os elementos do steering vector, tem-se:
vk(k) =[ej(
N12 )kzd, ej(
N12
1)kzd, . . . , ej(N12 )kzd
]T, (6)
no qual kz =2pi cos .
Nota-se, atraves de (6), que o arranjo linear nao
ofereceinformacao no angulo de azimute da onda plana.
Solucao:arranjos planares ou volumetricos.
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 6 / 18
-
ULA - Funcao frequencia-numero de onda
Substituindo a equacao do steering vector (6) na expressao da
funcaofrequencia-numero de onda do filtro w, obtemos a seguinte
equacaopara uma ULA:
(, kz) = wHvk(k)
=
N1n=0
wnej(N12 n)kzd
=
N1n=0
wnej(nN12 )kzd, (7)
para 2pi kz 2pi (regiao de visibilidade do arranjo).Seja = kz d
= 2pi cos d. A equacao (7) pode ser expressa emfuncao de da
seguinte forma:
() = ejN1
2N1n=0
wnejn, 2pid
2pid
. (8)
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 7 / 18
-
ULA - Padrao de radiacao
O padrao de radiacao B() de um arranjo e obtido varrendo-se asua
regiao de visibilidade. Dessa forma:
B() = (), 2pid 2pid
. (9)
Escrevendo (9) em funcao de :
B() = ej(N12 ) 2pid cos
N1n=0
wnejn 2pid
cos , 0 pi, (10)
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 8 / 18
-
ULA - propriedades do steering vector
A representacao do steering vector em funcao de apresenta
duaspropriedades:
Simetria conjugada. Exemplo: considerando que N e par:
v() =[ej
N12 , ej
N32 , . . . , ej
N32 , ej
N12
]T=[v1(), Jv
1()
]T,
no qual J e uma matriz de trocas e v1() e um vetor que contem
osN/2 elementos de v().Estrutura de Vandermonde.
v() = ejN12
[1, ej, . . . , ej(N1)
]T(11)
Essas propriedades podem auxiliar na simplificacao de calculos
eprover informacao a priori em problemas de
estimacaonao-supervisionada.
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 9 / 18
-
Arranjo Linear Uniformemente Ponderado
Um tipo de arranjo linear interessante ocorre quando w = 1N 1.A
funcao frequencia-numero de onda (8) e escrita agora como:
() =1
Nej(
N12 )
N1n=0
ejn
=1
Nej(
N12 )
[1 ejN1 ej
]=
1
N
sin (N/2)
sin (/2)(12)
Atraves de (12), podemos obter as expressoes do padrao de
radiacaodo arranjo varrendo a sua regiao de visibilidade:
B() =1
N
sin (N/2)
/2, 2pid
2pid
(13)
B() =1
N
sin(N22pi cos d
)sin(122pi cos d
) , 0 pi (14)L. N. Ribeiro (UFC) Processamento de sinais em
arranjo de sensores 31 de Marco de 2015 10 / 18
-
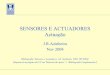
Exemplo
Arranjo linear uniformemente ponderado
N = 11 e N = 31.f = 2.4 GHz.d = /2
Calculo do padrao de radiacao do arranjo linear.
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 11 / 18
-
0.2
0.4
0.6
0.8
1
30
210
60
240
90
270
120
300
150
330
180 0
N=11N=31
Figura: Plot polar de B().L. N. Ribeiro (UFC) Processamento de
sinais em arranjo de sensores 31 de Marco de 2015 12 / 18
-
4 3 2 1 0 1 2 3 40.4
0.2
0
0.2
0.4
0.6
0.8
1
B (
)
N=11N=31
Figura: Plot de B().
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 13 / 18
-
4 3 2 1 0 1 2 3 4100
90
80
70
60
50
40
30
20
10
0
20lo
g 10|B
()| [
dB]
N=11N=31
Figura: Plot de B() em dB.
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 14 / 18
-
Parametros do padrao de radiacao de um arranjo linear
Largura de feixe de 3-dB.
Largura de feixe de nulo-a-nulo.
Grating lobes.
Por conveniencia, o padrao de radiacao do arranjo linear agora
sera funcaode u = cos :
Bu(u) =1
N
sin(piNd u
)sin(pid u) , 1 u 1. (15)
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 15 / 18
-
Parametros do padrao de radiacao de um arranjo linear
Half Power Beamwidth(HPBW)
Distancia entre os pontos utal que |Bu(u)|2 = 0.5 ou|Bu(u)| =
1/
2.
Null-to-Null beamwidth(BWNN )
Numerador de (15) igual azero.Criterio de resolucao
deRayleigh.
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 16 / 18
-
Criterio de Resolucao de Rayleigh
Detectabilidade de duas ondas planas.
Detectaveis se o pico do segundo padrao de radiacao estiver,
pelomenos, alem do nulo principal do primeiro diagrama de
radiacao.
Ou seja, separacao de BWNN/2.
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 17 / 18
-
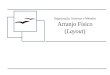
Grating lobes
Grating lobes sao lobulos com a mesma altura do lobulo
principal.Apesar da regiao de visibilidade de Bu(u) ser [1; 1],
essa funcao estadefinida em varios outros pontos.Grating lobes sao
deslocados atraves da operacao array steering,apresentada na
proxima secao.Formatacao automatica de feixe.
5 4 3 2 1 0 1 2 3 4 5180
160
140
120
100
80
60
40
20
0
u
20lo
g 10|B
u(u)
| [dB]
L. N. Ribeiro (UFC) Processamento de sinais em arranjo de
sensores 31 de Marco de 2015 18 / 18
IntroduoArranjo Linear UniformeArranjo Linear Uniformemente
PonderadoParmetros do padro de radiao de um arranjo linear