Embed Size (px)
Citation preview
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 1
MODULO I. CONTROL REGULATORIO AVANZADO
Tema 1. Revisión del controlador PID y consideraciones industriales
• 1.‐ Introducción– Control por realimentación. Razón de la realimentación. Controladores On‐Off– Evolución histórica del controlador PID– Expresión matemática del controlador
EL CONTROLADOR PID
• 2.‐ Acciones correctoras del controlador PID– La acción proporcional– La acción integral o automatic reset.– La acción derivativa o pre‐act.
• 3.‐ Estructuras del PID– Representaciones alternativas (ISA, Serie, Paralelo)– SetPoint weighting. PI‐D. I‐PD
• 4.‐Modificaciones al PID– Limitación de la acción derivativa– El efecto Wind‐up y el anti Wind‐up– El efecto Wind‐up y el anti Wind‐up
• 5.‐ Realización digital– Filtro Anti‐aliasing– Discretización– Consideraciones sobre la cuantificacíón
• 6.‐ Notas Prácticas sobre el PID
2
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 2
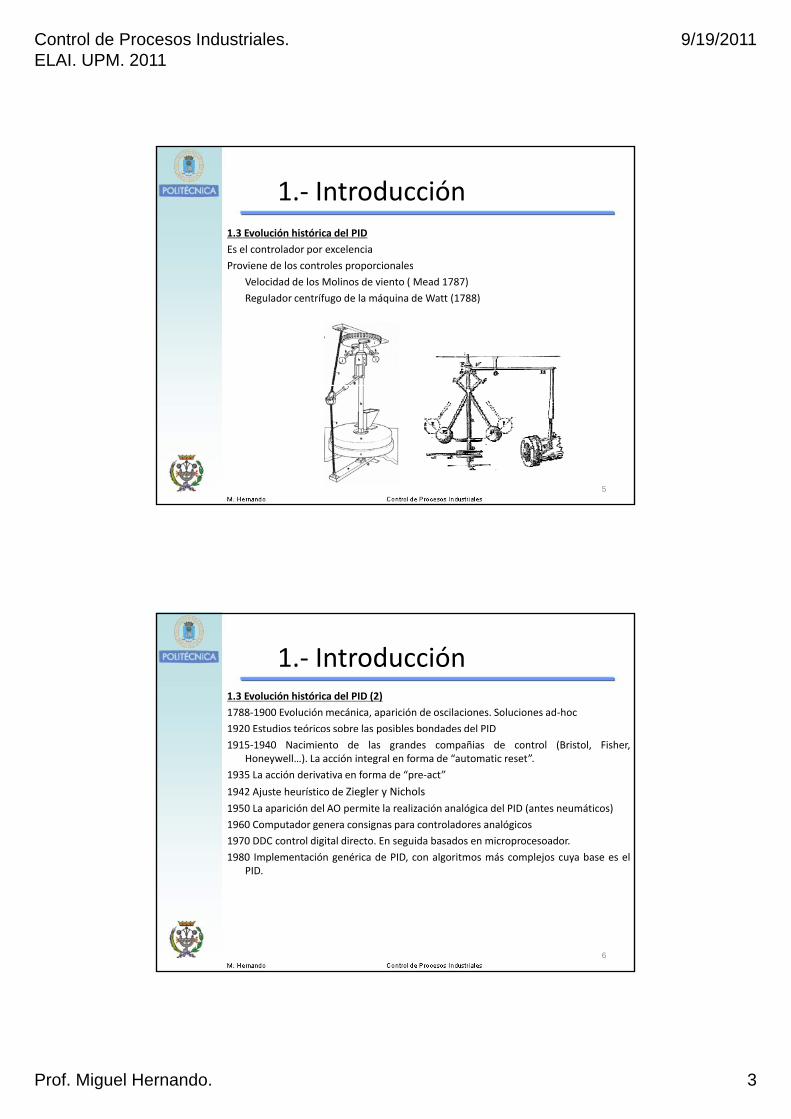
1.1 Control por realimentación• Sistema en cadena abierta: más preciso, estable, rápido, raramente oscilatorio…• Sistema en cadena cerrada: aparece el error inestabilidades oscilaciones lento
1.‐ Introducción
• Sistema en cadena cerrada: aparece el error, inestabilidades, oscilaciones, lento…• ¿Por qué realimentamos los sistemas?
3
El sistema corrige la acción de control en base a la observación de la variable que sequiere controlar.
Hace frente a las perturbaciones tanto previsibles como imprevisibles.
1.2 Control On‐Off• Sistema de control realimentado más
sencillo
1.‐ Introducción
sencillo.• No hay ajuste alguno de parámetros.
Funciona sólo entre dos estados de la variable de control:
si e>0 u = umáx.si e<0 u = umín
• Objetivo: permanecer cerca de la consigna.• Inconveniente: la variable de proceso puede
oscilar; las conmutaciones de u pueden deteriorar los actuadores.
• Modificaciones: incluir zonas muertas, histéresis (0.5 ± 2% del rango máximo)
• Control de nivel de depósitos de agua
4
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 3
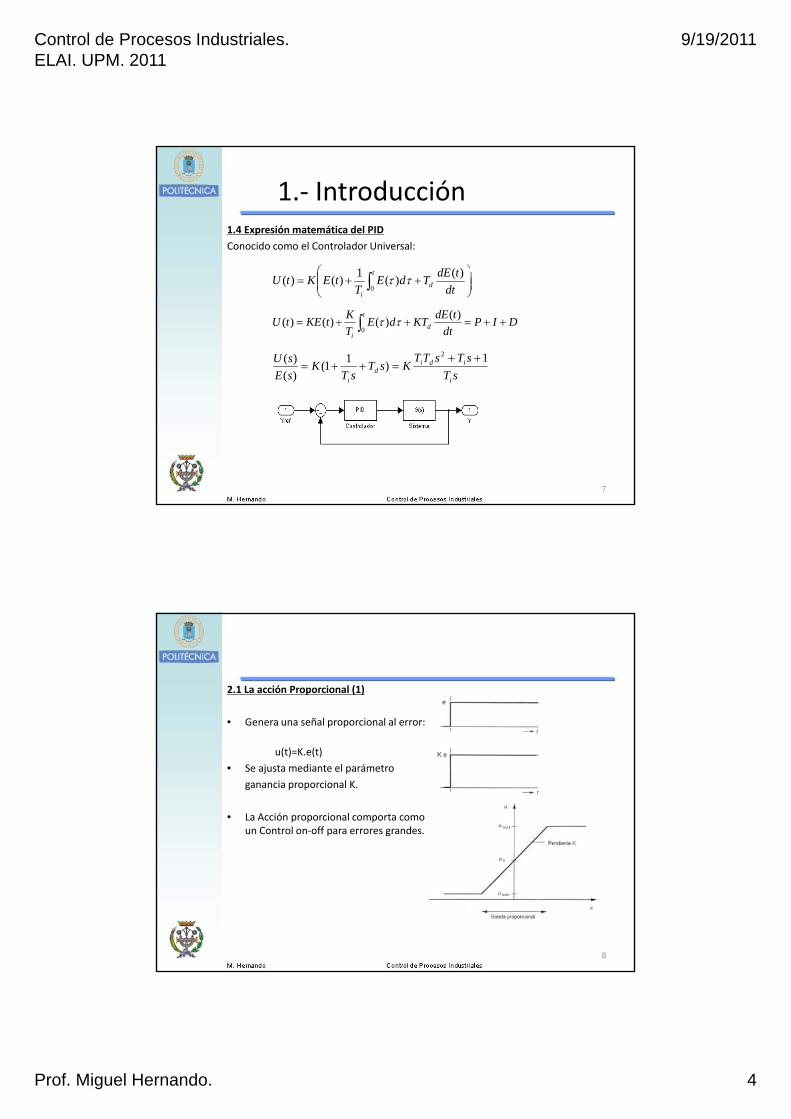
1.3 Evolución histórica del PIDEs el controlador por excelenciaProviene de los controles proporcionales
1.‐ Introducción
Proviene de los controles proporcionalesVelocidad de los Molinos de viento ( Mead 1787)Regulador centrífugo de la máquina de Watt (1788)
5
1.3 Evolución histórica del PID (2)1788‐1900 Evolución mecánica, aparición de oscilaciones. Soluciones ad‐hoc1920 Estudios teóricos sobre las posibles bondades del PID
1.‐ Introducción
p1915‐1940 Nacimiento de las grandes compañias de control (Bristol, Fisher,
Honeywell…). La acción integral en forma de “automatic reset”.1935 La acción derivativa en forma de “pre‐act”1942 Ajuste heurístico de Ziegler y Nichols1950 La aparición del AO permite la realización analógica del PID (antes neumáticos)1960 Computador genera consignas para controladores analógicos1970 DDC control digital directo. En seguida basados en microprocesoador.1980 Implementación genérica de PID, con algoritmos más complejos cuya base es el
PID.
6
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 4
1.4 Expresión matemática del PIDConocido como el Controlador Universal:
1.‐ Introducción
⎞⎛⎟⎟⎠
⎞⎜⎜⎝
⎛++= ∫
t
di dt
tdETdET
tEKtU0
)()(1)()( ττ
DIPdt
tdEKTdETKtKEtU
t
di
++=++= ∫0)()()()( ττ
sTsTsTT
KsTsT
KsEsU
i
idid
i
1)11(
)()( 2 ++
=++=
7
2.1 La acción Proporcional (1)
• Genera una señal proporcional al error:
2.‐ Acciones correctoras del PID
u(t)=K.e(t)• Se ajusta mediante el parámetro
ganancia proporcional K.
• La Acción proporcional comporta como un Control on‐off para errores grandes.
8
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 5
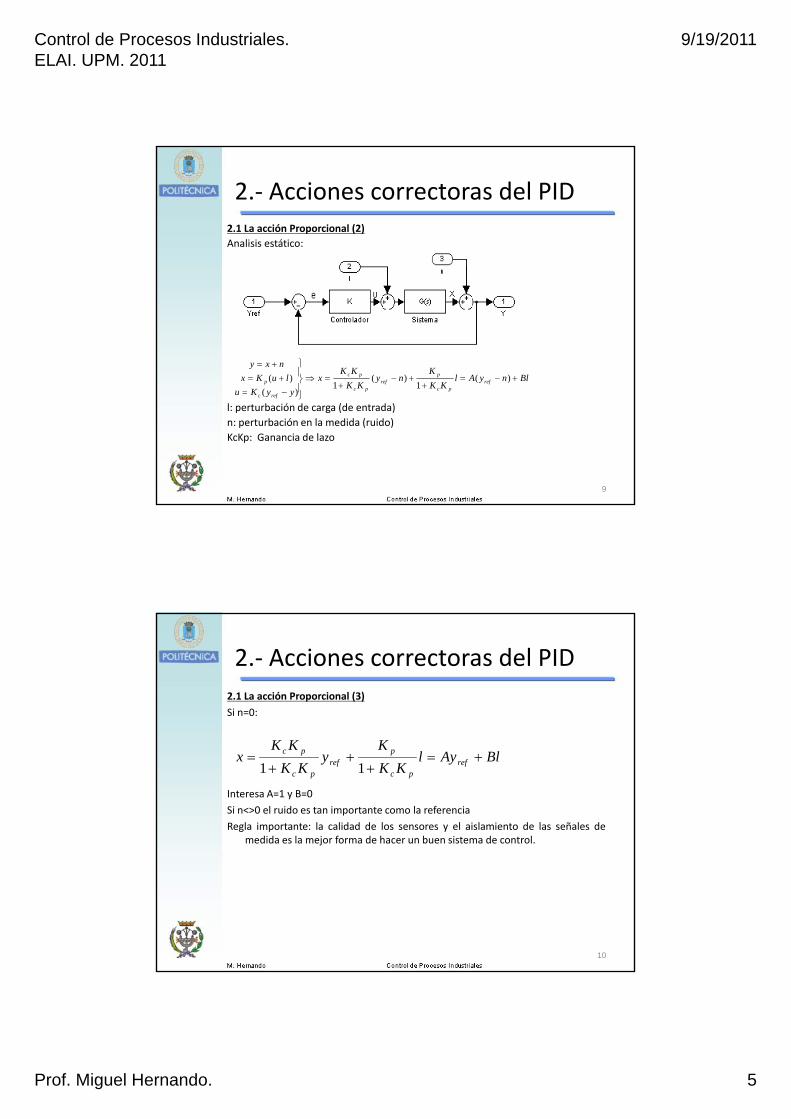
2.1 La acción Proporcional (2)Analisis estático:
2.‐ Acciones correctoras del PID
BlnyAlKK
Kny
KKKK
xluKxnxy
refp
refpc
p +−=+
+−+
=⇒⎪
⎪⎬
⎫
+=+=
)(1
)(1
)(
l: perturbación de carga (de entrada)n: perturbación en la medida (ruido)KcKp: Ganancia de lazo
9
KKKKyyKu pcpc
refc
++⎪⎭−=
11)(
2.1 La acción Proporcional (3)Si n=0:
2.‐ Acciones correctoras del PID
Interesa A=1 y B=0Si n<>0 el ruido es tan importante como la referenciaRegla importante: la calidad de los sensores y el aislamiento de las señales de
medida es la mejor forma de hacer un buen sistema de control.
BlAylKK
Ky
KKKK
x refpc
pref
pc
pc +=+
++
=11
10
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 6
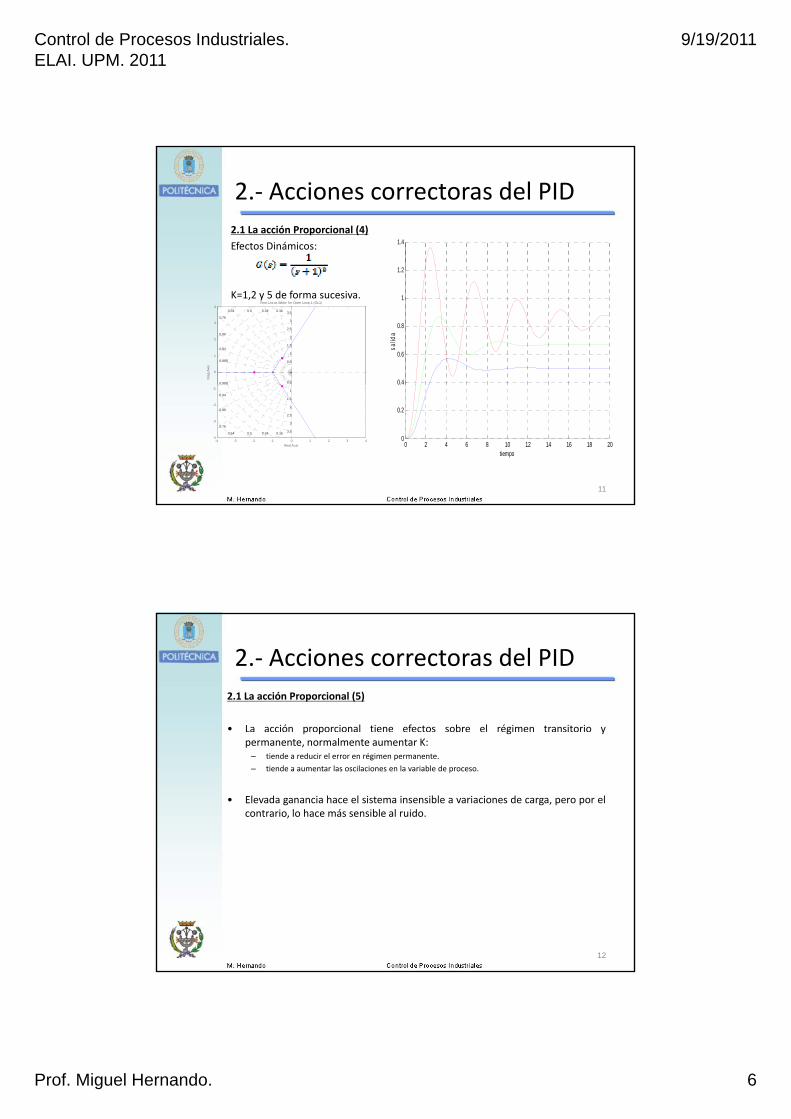
2.1 La acción Proporcional (4)Efectos Dinámicos:
2.‐ Acciones correctoras del PID
1.4
K=1,2 y 5 de forma sucesiva.
0.4
0.6
0.8
1
1.2
salid
a
0
1
2
3
40.160.340.50.64
0.76
0.86
0.94
0.985
0.985
0.5
1
1.5
2
2.5
3
3.5
0.5
Root Locus Editor for Open Loop 1 (OL1)
Imag
Axi
s
11
0 2 4 6 8 10 12 14 16 18 200
0.2
tiempo
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0.160.340.50.64
0.76
0.86
0.941
1.5
2
2.5
3
3.5
Real Axis
2.1 La acción Proporcional (5)
• La acción proporcional tiene efectos sobre el régimen transitorio y
2.‐ Acciones correctoras del PID
p p g ypermanente, normalmente aumentar K:
– tiende a reducir el error en régimen permanente.– tiende a aumentar las oscilaciones en la variable de proceso.
• Elevada ganancia hace el sistema insensible a variaciones de carga, pero por elcontrario, lo hace más sensible al ruido.
12
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 7
2.2 La acción Integral (1)• Genera una señal que es proporcional a la
integral del error.D b i bi d l ió i l
2.‐ Acciones correctoras del PID
• Debe ir combinada con la acción proporcional, de la forma:
• Se ajusta mediante el parámetro Ti tiempo integral.
• La acción integral actuará mientras exista
∫+⋅= ))(1)(()( dtteT
teKtui
⎜⎜⎝
⎛⎟⎠⎞+
=+=s
sTTK
sTKsG i
ii
1)11()(
error:– si e>0, variable de control u crece.– si e<0, variable de control u decrece.
• Tiene efecto sobre el régimen permanente. Su objetivo: anular el error.
13
2.2 La acción Integral (2)El automatic reset.
1111 T ⎞⎛
2.‐ Acciones correctoras del PID
La variable real es
Cuando existe I:
La acción integral asume con el tiempo la
oreal UtUtU += )()(
)()()()()( ntegral tUtUtUUtUtU opiopreal +=++=
)(11)(1
)(
111
1)(11
1)( sesT
KsesT
sTKse
sTsT
Kse
sT
KsUii
i
i
i
i
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
+=
+−+
=−
=
0dB
1/Ti
La acción integral asume con el tiempo la componente de continua marcada por el regulador.
14
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 8
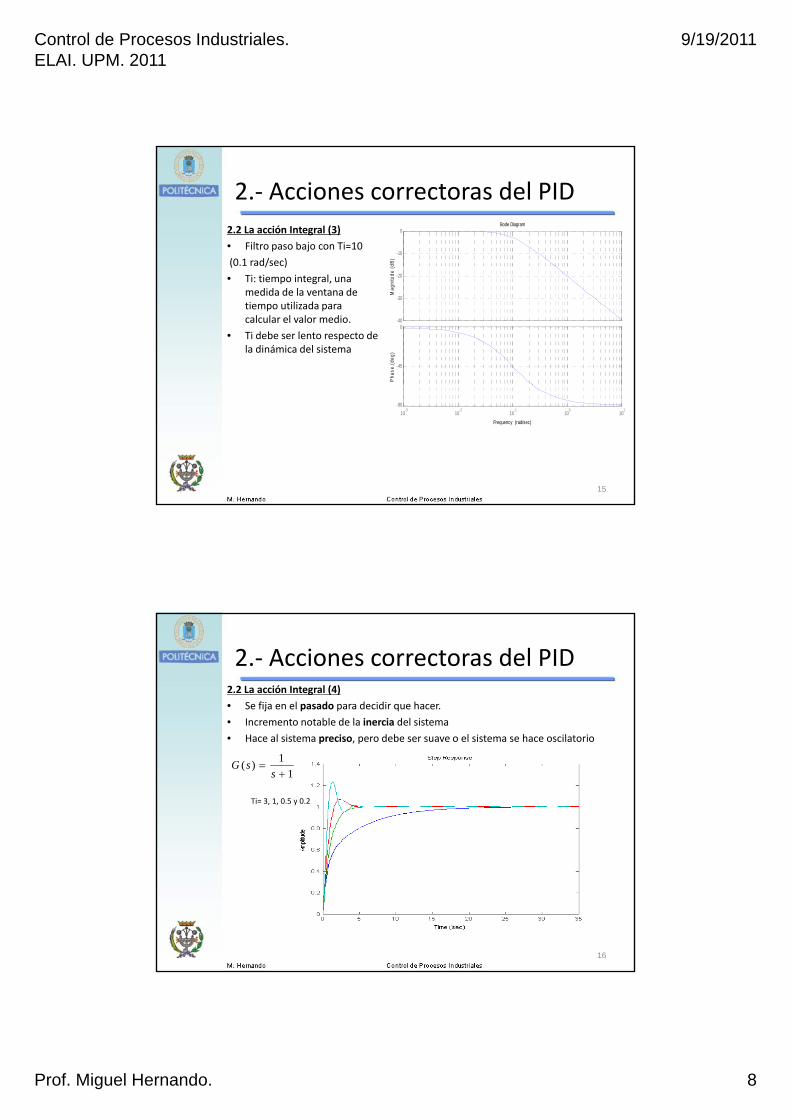
2.2 La acción Integral (3)• Filtro paso bajo con Ti=10(0.1 rad/sec)
-10
0
dB)
Bode Diagram
2.‐ Acciones correctoras del PID
( / )• Ti: tiempo integral, una
medida de la ventana de tiempo utilizada para calcular el valor medio.
• Ti debe ser lento respecto de la dinámica del sistema
-40
-30
-20
Mag
nitu
de (d
-45
0
Phas
e (d
eg)
15
10-3
10-2
10-1
100
101
-90
Frequency (rad/sec)
2.2 La acción Integral (4)• Se fija en el pasado para decidir que hacer.• Incremento notable de la inercia del sistema
2.‐ Acciones correctoras del PID2.‐ Acciones correctoras del PID
• Hace al sistema preciso, pero debe ser suave o el sistema se hace oscilatorio
Ti= 3, 1, 0.5 y 0.2
11)(+
=s
sG
16
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 9
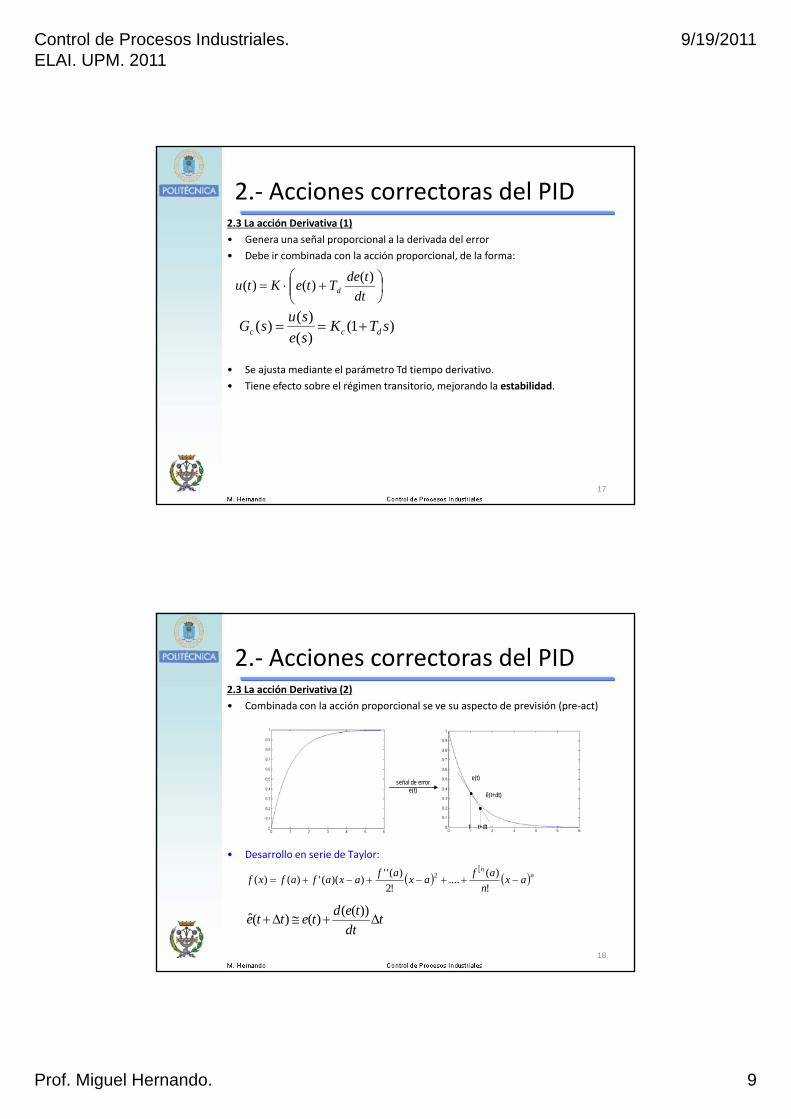
2.3 La acción Derivativa (1)• Genera una señal proporcional a la derivada del error• Debe ir combinada con la acción proporcional, de la forma:
2.‐ Acciones correctoras del PID
• Se ajusta mediante el parámetro Td tiempo derivativo.• Tiene efecto sobre el régimen transitorio mejorando la estabilidad
⎜⎜⎝
⎛⎟⎠⎞+⋅=
dttdeTteKtu d)()()(
)1()()()( sTK
sesusG dcc +==
• Tiene efecto sobre el régimen transitorio, mejorando la estabilidad.
17
2.3 La acción Derivativa (2)• Combinada con la acción proporcional se ve su aspecto de previsión (pre‐act)
2.‐ Acciones correctoras del PID
e(t)
t t+dt
ê(t+dt)
señal de error e(t)
D ll i d T l
18
• Desarrollo en serie de Taylor:
( )[
( )nn
axn
afaxafaxafafxf −++−+−+=!
)(....!2
)(''))((')()( 2
tdt
tedtette Δ+≅Δ+))(()()(ˆ
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 10
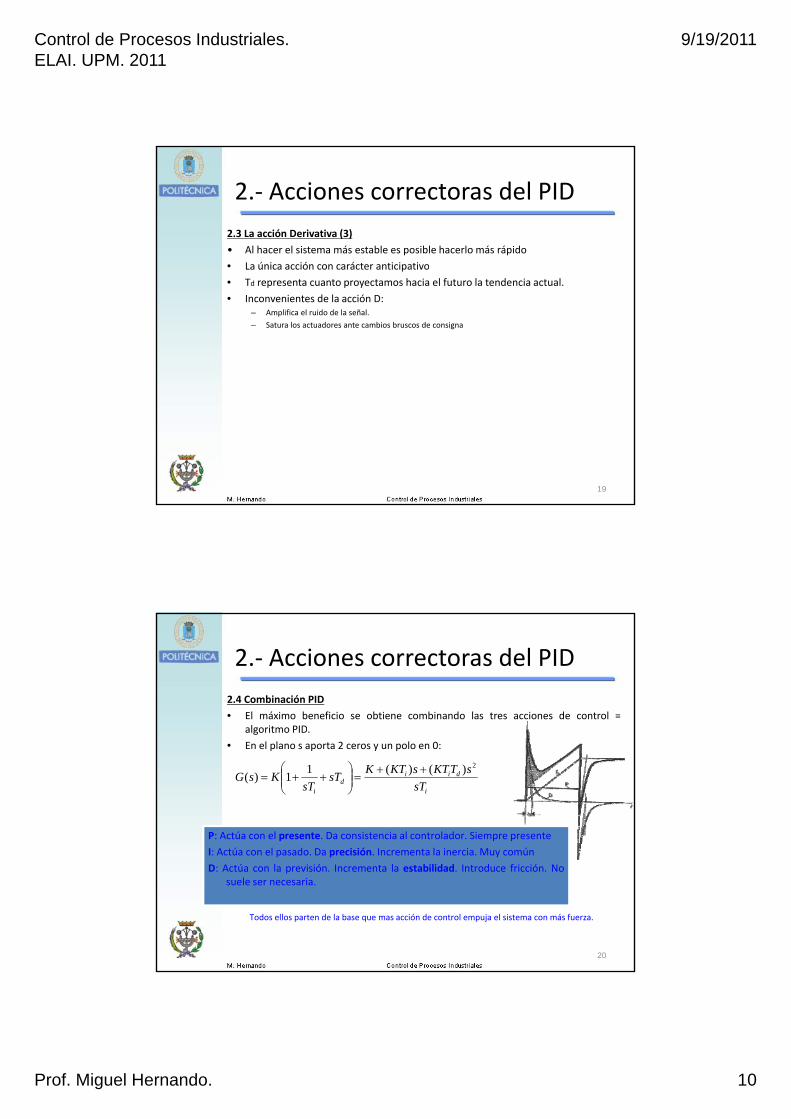
2.3 La acción Derivativa (3)• Al hacer el sistema más estable es posible hacerlo más rápido• La única acción con carácter anticipativo
2.‐ Acciones correctoras del PID
• La única acción con carácter anticipativo• Td representa cuanto proyectamos hacia el futuro la tendencia actual.• Inconvenientes de la acción D:
– Amplifica el ruido de la señal.– Satura los actuadores ante cambios bruscos de consigna
19
2.4 Combinación PID• El máximo beneficio se obtiene combinando las tres acciones de control =
algoritmo PID.
2.‐ Acciones correctoras del PID2.‐ Acciones correctoras del PID
algoritmo PID.• En el plano s aporta 2 ceros y un polo en 0:
P: Actúa con el presente. Da consistencia al controlador. Siempre presenteI: Actúa con el pasado Da precisión Incrementa la inercia Muy común
i
diid
i sTsTKTsKTKsT
sTKsG
2)()(11)( ++=⎟⎟
⎠
⎞⎜⎜⎝
⎛++=
20
I: Actúa con el pasado. Da precisión. Incrementa la inercia. Muy comúnD: Actúa con la previsión. Incrementa la estabilidad. Introduce fricción. No
suele ser necesaria.
Todos ellos parten de la base que mas acción de control empuja el sistema con más fuerza.
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 11
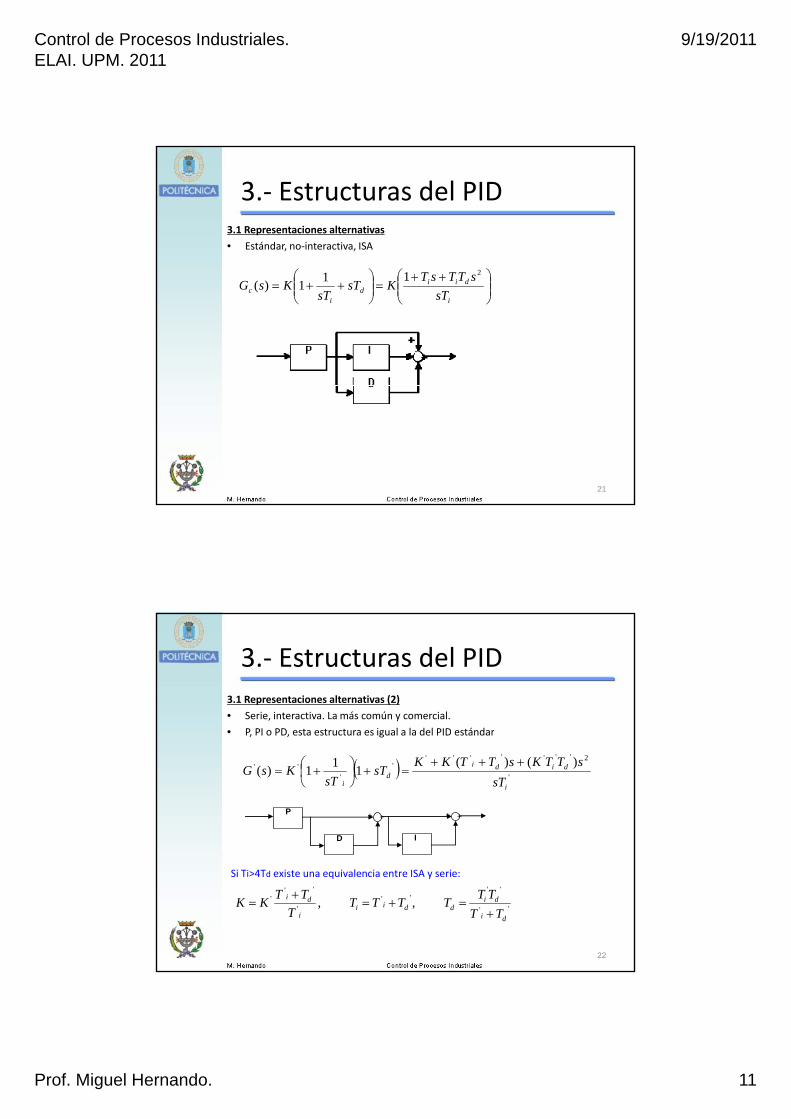
3.1 Representaciones alternativas• Estándar, no‐interactiva, ISA
3.‐ Estructuras del PID
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++=⎟⎟
⎠
⎞⎜⎜⎝
⎛++=
i
diid
ic sT
sTTsTKsT
sTKsG
2111)(
21
3.1 Representaciones alternativas (2)• Serie, interactiva. La más común y comercial.• P PI o PD esta estructura es igual a la del PID estándar
3.‐ Estructuras del PID
• P, PI o PD, esta estructura es igual a la del PID estándar
( ) '
2''''''''
''' )()(
111)(i
didid
i sTsTTKsTTKK
sTsT
KsG+++
=+⎟⎠⎞
⎜⎝⎛ +=
D
P + +
I
+ +
22
''
''''
'
''' ,,
di
diddii
i
di
TTTTTTTT
TTTKK
+=+=
+=
Si Ti>4Td existe una equivalencia entre ISA y serie:
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 12
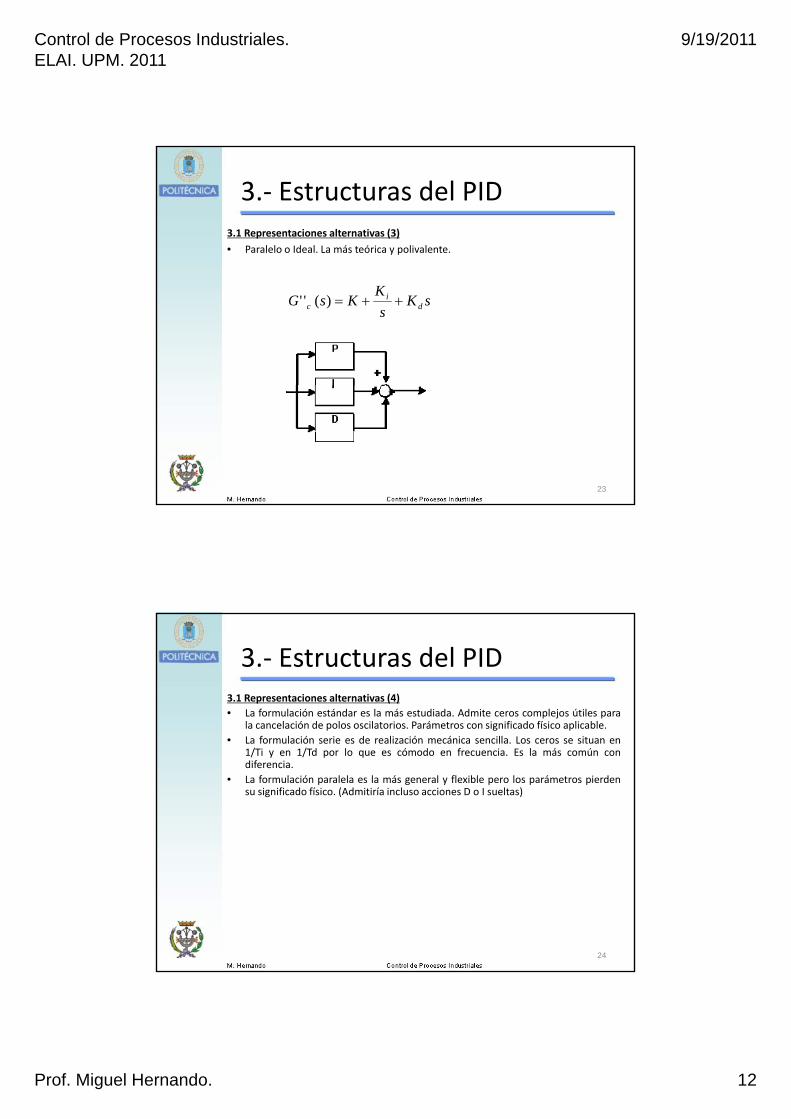
3.1 Representaciones alternativas (3)• Paralelo o Ideal. La más teórica y polivalente.
3.‐ Estructuras del PID
sKs
KKsG d
ic ++=)(''
23
3.1 Representaciones alternativas (4)• La formulación estándar es la más estudiada. Admite ceros complejos útiles para
la cancelación de polos oscilatorios. Parámetros con significado físico aplicable.
3.‐ Estructuras del PID
• La formulación serie es de realización mecánica sencilla. Los ceros se situan en1/Ti y en 1/Td por lo que es cómodo en frecuencia. Es la más común condiferencia.
• La formulación paralela es la más general y flexible pero los parámetros pierdensu significado físico. (Admitiría incluso acciones D o I sueltas)
24
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 13
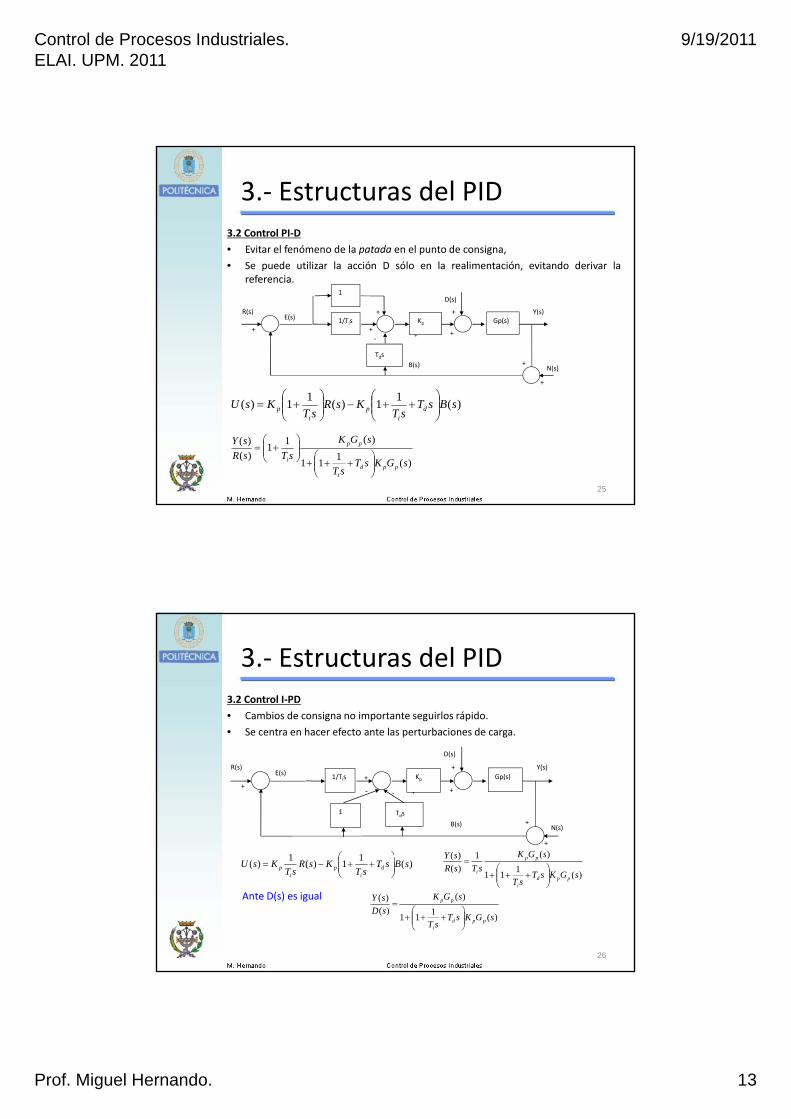
3.2 Control PI‐D• Evitar el fenómeno de la patada en el punto de consigna,• Se puede utilizar la acción D sólo en la realimentación evitando derivar la
3.‐ Estructuras del PID
• Se puede utilizar la acción D sólo en la realimentación, evitando derivar lareferencia.
R(s)
+
+
+
++
D(s)
+
+
-
+
+
Y(s)
1
1/Tis
Tds
Kp Gp(s)E(s)
B(s) N(s)
25
)(111
)(11)()(
sGKsTsT
sGKsTsR
sY
ppdi
pp
i⎟⎟⎠
⎞⎜⎜⎝
⎛+++
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
)(11)(11)( sBsTsT
KsRsT
KsU di
pi
p ⎟⎟⎠
⎞⎜⎜⎝
⎛++−⎟⎟
⎠
⎞⎜⎜⎝
⎛+=
3.2 Control I‐PD• Cambios de consigna no importante seguirlos rápido.• Se centra en hacer efecto ante las perturbaciones de carga
3.‐ Estructuras del PID
• Se centra en hacer efecto ante las perturbaciones de carga.
R(s)
+
+
+
++
D(s)
+ - -
+
+
Y(s)
1
1/Tis
Tds
Kp Gp(s)E(s)
B(s) N(s)
⎞⎛ )(1)( GK
26
)(11)(1)( sBsTsT
KsRsT
KsU di
pi
p ⎟⎟⎠
⎞⎜⎜⎝
⎛++−=
)(111
)(1)()(
sGKsTsT
sGKsTsR
sY
ppdi
pp
i⎟⎟⎠
⎞⎜⎜⎝
⎛+++
=
)(111
)()()(
sGKsTsT
sGKsDsY
ppdi
pp
⎟⎟⎠
⎞⎜⎜⎝
⎛+++
=Ante D(s) es igual
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 14
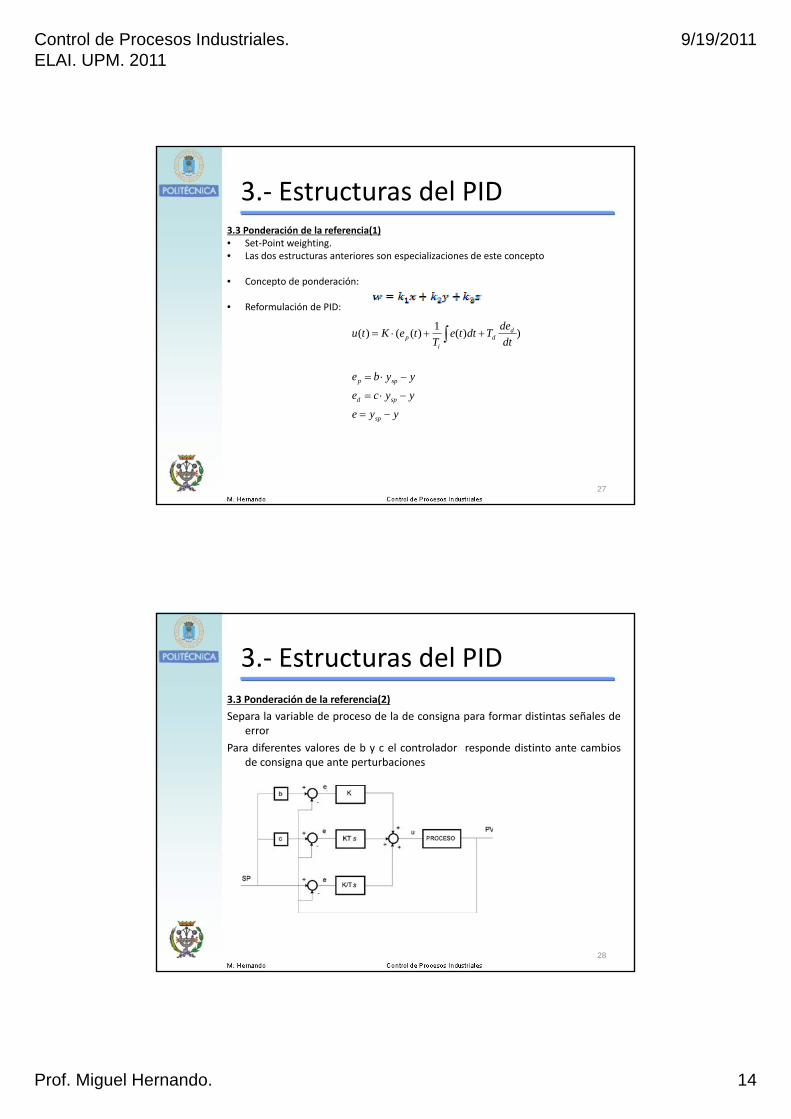
3.3 Ponderación de la referencia(1)• Set‐Point weighting.• Las dos estructuras anteriores son especializaciones de este concepto
3.‐ Estructuras del PID
• Concepto de ponderación:
• Reformulación de PID:
yybe
dtdeTdtte
TteKtu
spp
dd
ip
−⋅=
++⋅= ∫ ))(1)(()(
27
yye
yyce
sp
spd
−=
−⋅=
3.3 Ponderación de la referencia(2)Separa la variable de proceso de la de consigna para formar distintas señales de
error
3.‐ Estructuras del PID
errorPara diferentes valores de b y c el controlador responde distinto ante cambios
de consigna que ante perturbaciones
28
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 15
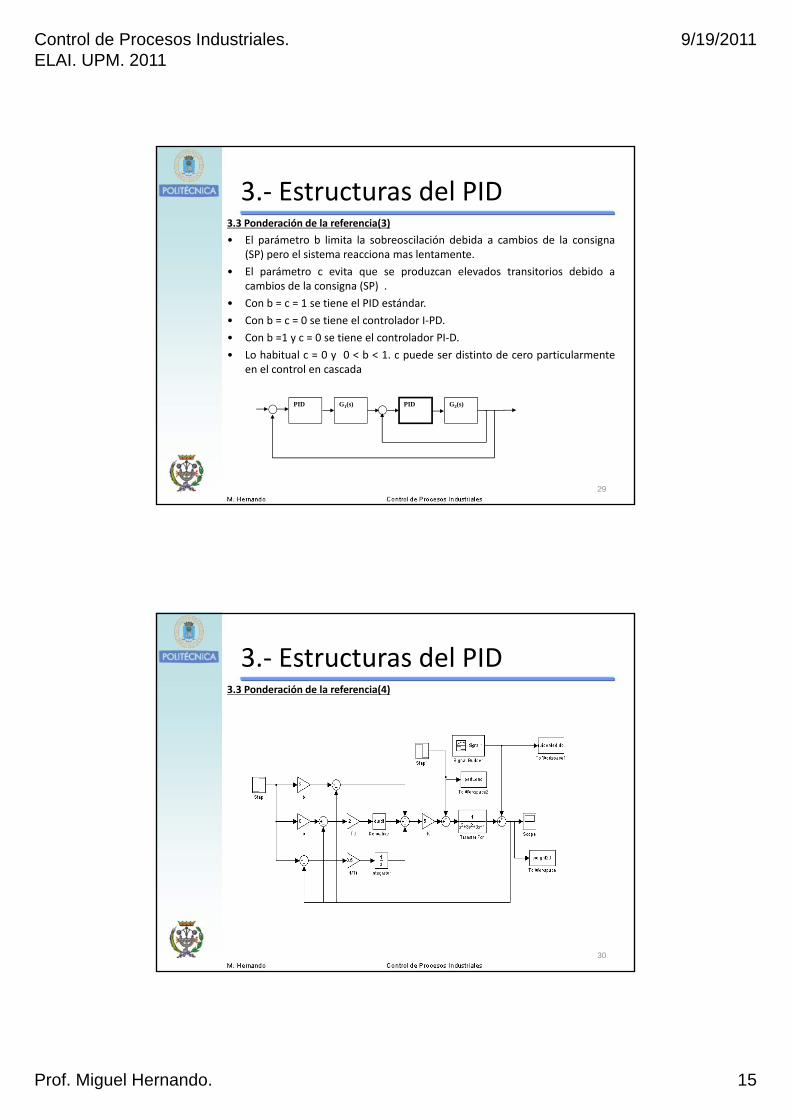
3.3 Ponderación de la referencia(3)• El parámetro b limita la sobreoscilación debida a cambios de la consigna
(SP) pero el sistema reacciona mas lentamente.
3.‐ Estructuras del PID
• El parámetro c evita que se produzcan elevados transitorios debido acambios de la consigna (SP) .
• Con b = c = 1 se tiene el PID estándar.• Con b = c = 0 se tiene el controlador I‐PD.• Con b =1 y c = 0 se tiene el controlador PI‐D.• Lo habitual c = 0 y 0 < b < 1. c puede ser distinto de cero particularmente
en el control en cascada
29
PID G2(s)G1(s)PID
3.3 Ponderación de la referencia(4)
3.‐ Estructuras del PID
30
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 16
3.3 Ponderación de la referencia(5)
3.‐ Estructuras del PIDAcción Proporcional (2‐0)
Acción Integral (2‐0)
31
Acción Derivativa (2‐0)
4.1 Limitación de la acción derivativa(1)Por la naturaleza del ruido este suele ser de alta frecuencia:
4.‐Modificaciones al PID
)sen( tan ω⋅=La acción derivativa amplifica en base a la frecuencia:
La acción derivativa amplifica el ruido.Por ello se limita con la inclusión de un filtro paso bajo:
)cos()( taKTdt
tdnKTu ddn ωω ⋅=⎟⎠⎞
⎜⎝⎛=
En alta frecuencia, D amplifica N (D(jw) con w=inf)
32
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 17
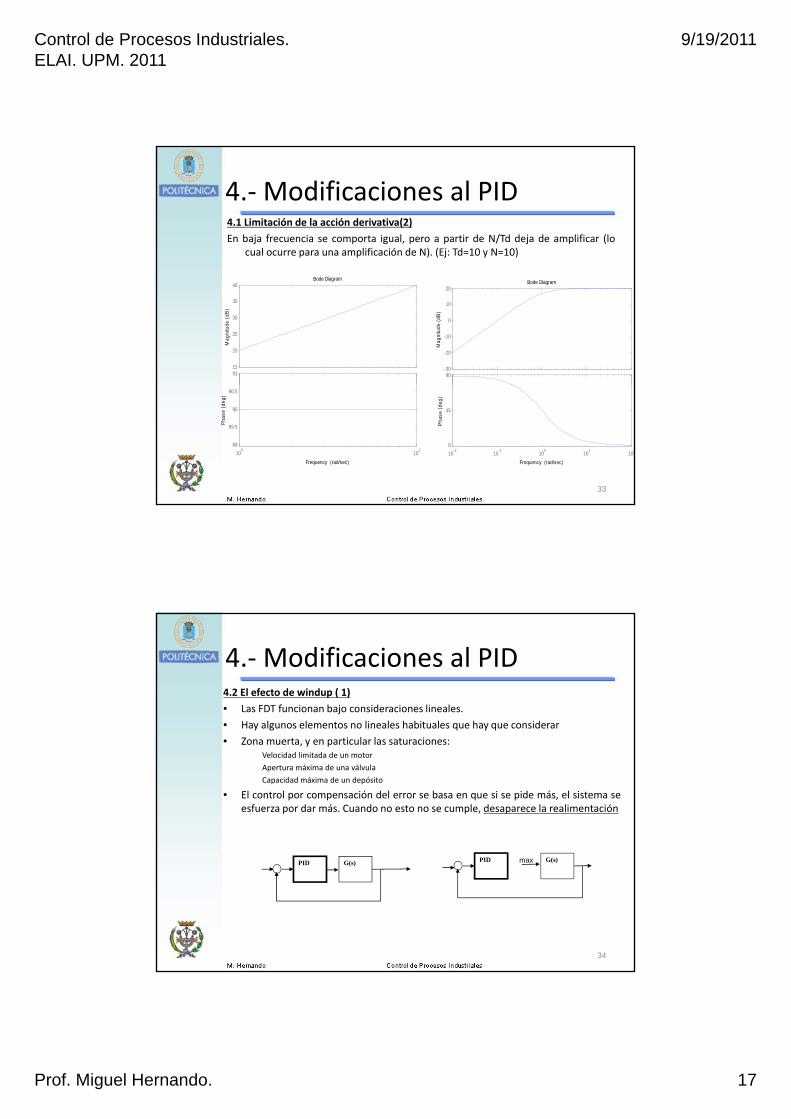
4.1 Limitación de la acción derivativa(2)En baja frecuencia se comporta igual, pero a partir de N/Td deja de amplificar (lo
cual ocurre para una amplificación de N). (Ej: Td=10 y N=10)
4.‐Modificaciones al PID
15
20
25
30
35
40
Mag
nitu
de (d
B)
91
Bode Diagram
-30
-20
-10
0
10
20
Mag
nitu
de (d
B)
90
Bode Diagram
33
100
101
89
89.5
90
90.5
Phas
e (d
eg)
Frequency (rad/sec)10
-210
-110
010
110
20
45
Phas
e (d
eg)
Frequency (rad/sec)
4.2 El efecto de windup ( 1)• Las FDT funcionan bajo consideraciones lineales.• Hay algunos elementos no lineales habituales que hay que considerar
4.‐Modificaciones al PID
• Zona muerta, y en particular las saturaciones:Velocidad limitada de un motorApertura máxima de una válvulaCapacidad máxima de un depósito
• El control por compensación del error se basa en que si se pide más, el sistema seesfuerza por dar más. Cuando no esto no se cumple, desaparece la realimentación
34
PID G(s) PID G(s)max
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 18
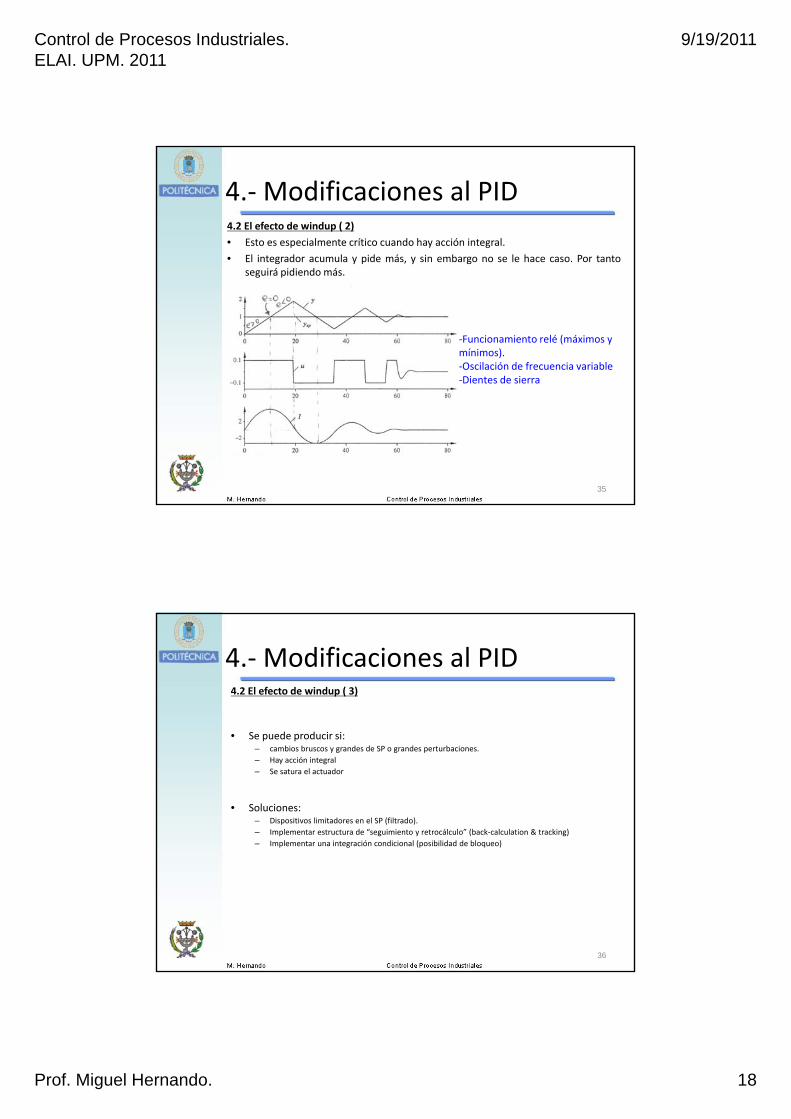
4.2 El efecto de windup ( 2)• Esto es especialmente crítico cuando hay acción integral.• El integrador acumula y pide más, y sin embargo no se le hace caso. Por tanto
4.‐Modificaciones al PID
seguirá pidiendo más.
‐Funcionamiento relé (máximos y mínimos).‐Oscilación de frecuencia variable‐Dientes de sierra
35
4.2 El efecto de windup ( 3)
S d d i i
4.‐Modificaciones al PID
• Se puede producir si:– cambios bruscos y grandes de SP o grandes perturbaciones.– Hay acción integral– Se satura el actuador
• Soluciones:– Dispositivos limitadores en el SP (filtrado).– Implementar estructura de “seguimiento y retrocálculo” (back‐calculation & tracking)– Implementar una integración condicional (posibilidad de bloqueo)
36
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 19
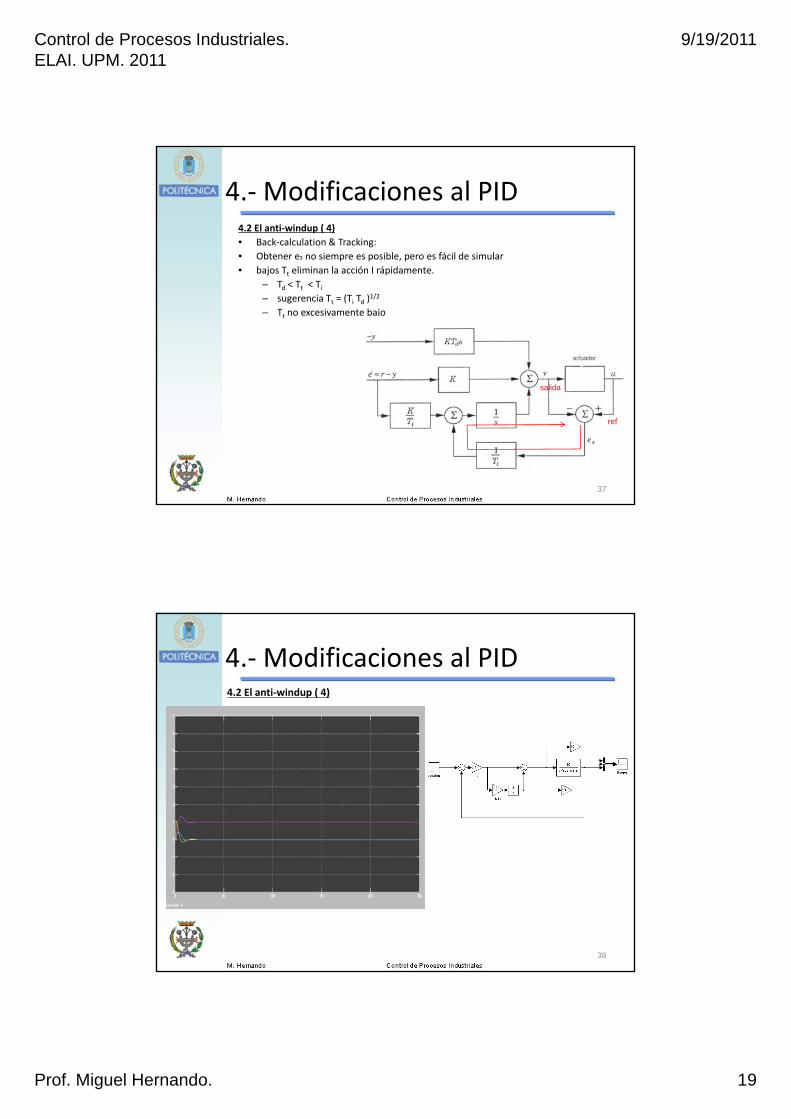
4.2 El anti‐windup ( 4)• Back‐calculation & Tracking:• Obtener es no siempre es posible, pero es fácil de simular
4.‐Modificaciones al PID
• bajos Tt eliminan la acción I rápidamente.– Td < Tt < Ti– sugerencia Tt = (Ti Td )1/2
– Tt no excesivamente bajo
lid
37
ref
salida
4.2 El anti‐windup ( 4)
4.‐Modificaciones al PID
38
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 20
4.2 El anti‐windup ( 5)
4.‐Modificaciones al PID
39
4.2 El anti‐windup ( 6)
4.‐Modificaciones al PID
40
antiwindup1.mdl
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 21
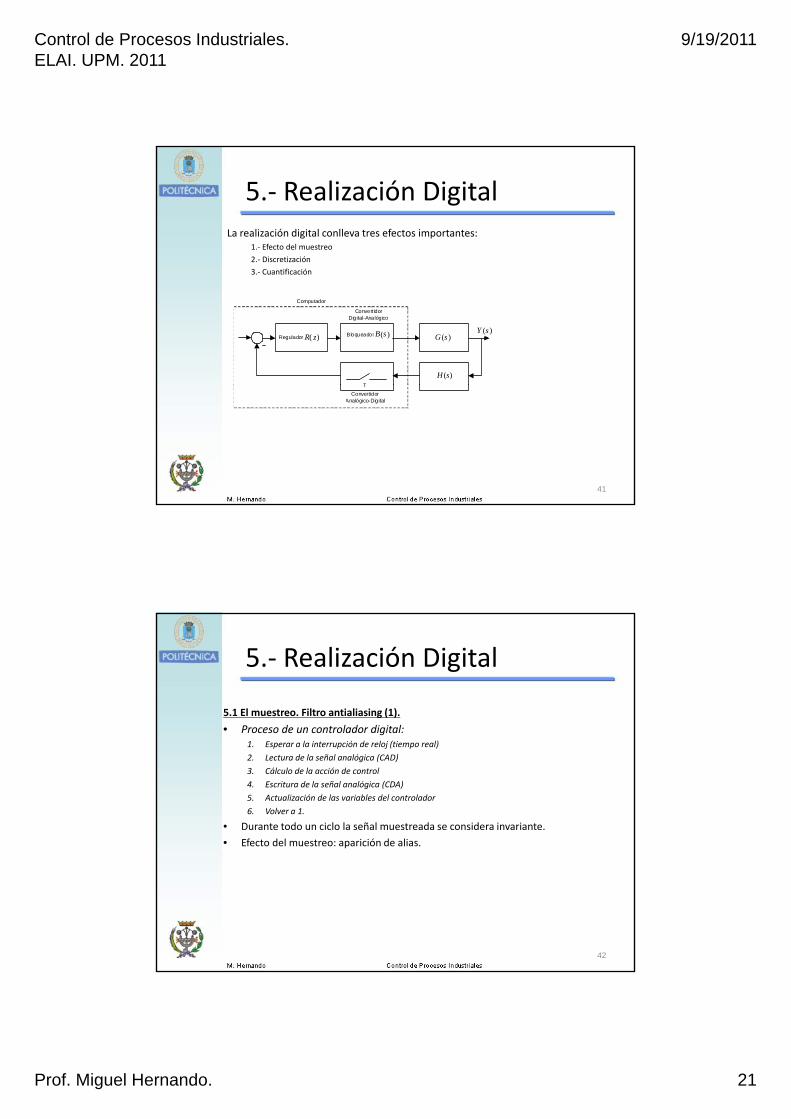
La realización digital conlleva tres efectos importantes:1.‐ Efecto del muestreo2.‐ Discretización
5.‐ Realización Digital
3.‐ Cuantificación
Regulador ) ( z R Bloqueador ) ( sB
Convert idor Digital-Analógico
T
) ( sG
) ( sH
Computador
) (sY
41
Convertidor Analógico-Digital
T
5.1 El muestreo. Filtro antialiasing (1).• Proceso de un controlador digital:
5.‐ Realización Digital
Proceso de un controlador digital:1. Esperar a la interrupción de reloj (tiempo real)2. Lectura de la señal analógica (CAD)3. Cálculo de la acción de control4. Escritura de la señal analógica (CDA)5. Actualización de las variables del controlador6. Volver a 1.
• Durante todo un ciclo la señal muestreada se considera invariante.• Efecto del muestreo: aparición de alias.
42
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 22
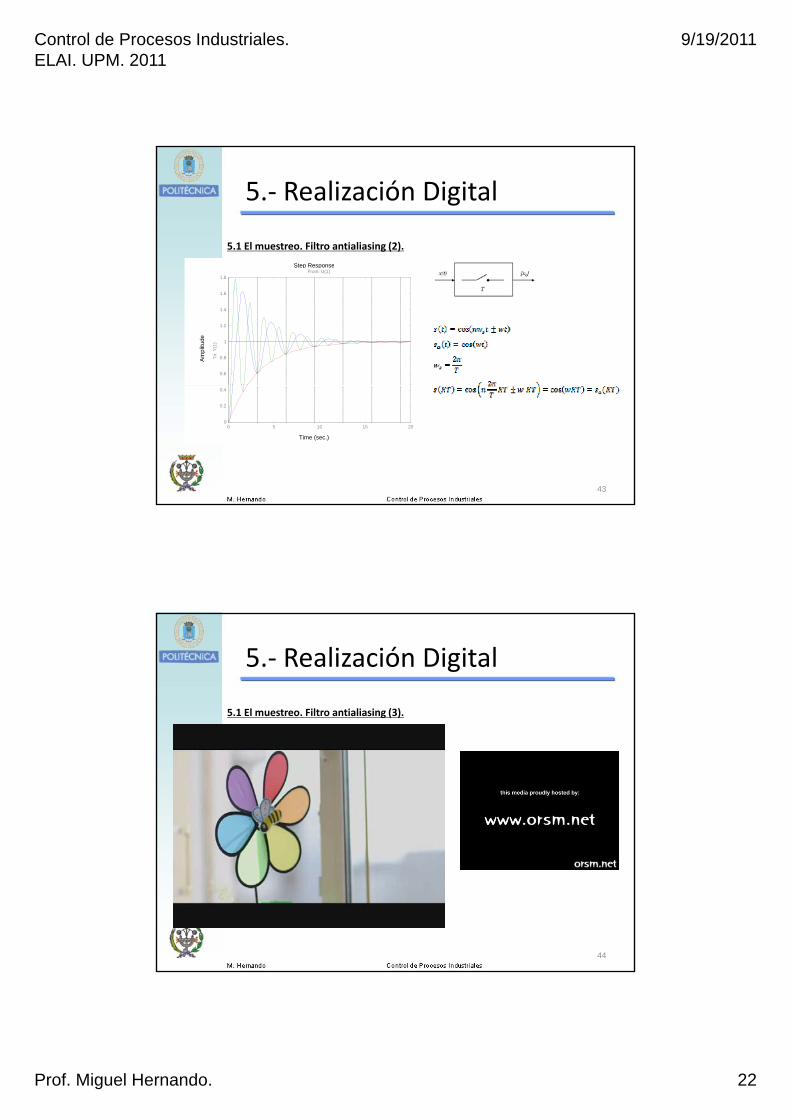
5.1 El muestreo. Filtro antialiasing (2)..
5.‐ Realización Digital
Step Response
Am
plitu
de
Step Response
0.6
0.8
1
1.2
1.4
1.6
1.8 From: U(1)
To: Y
(1)
43
Time (sec.)
0 5 10 15 200
0.2
0.4
5.1 El muestreo. Filtro antialiasing (3)..
5.‐ Realización Digital
44
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 23
5.1 El muestreo. Filtro antialiasing (3).• El efecto de aliasing: aparición de una falsa señal de baja frecuencia
5.‐ Realización Digital
El efecto de aliasing: aparición de una falsa señal de baja frecuencia como consecuencia del submuestreo.
• Producidas por señales que superen la frecuencia de Niquist (TªShanon).Wn=0.5Ws
• Solución: filtro analógico antes de muestrear.– Se suele usar uno de 2º Orden (Butterworth) con ancho de banda al menos de 1/8 de la
frecuencia de muestreo.
45
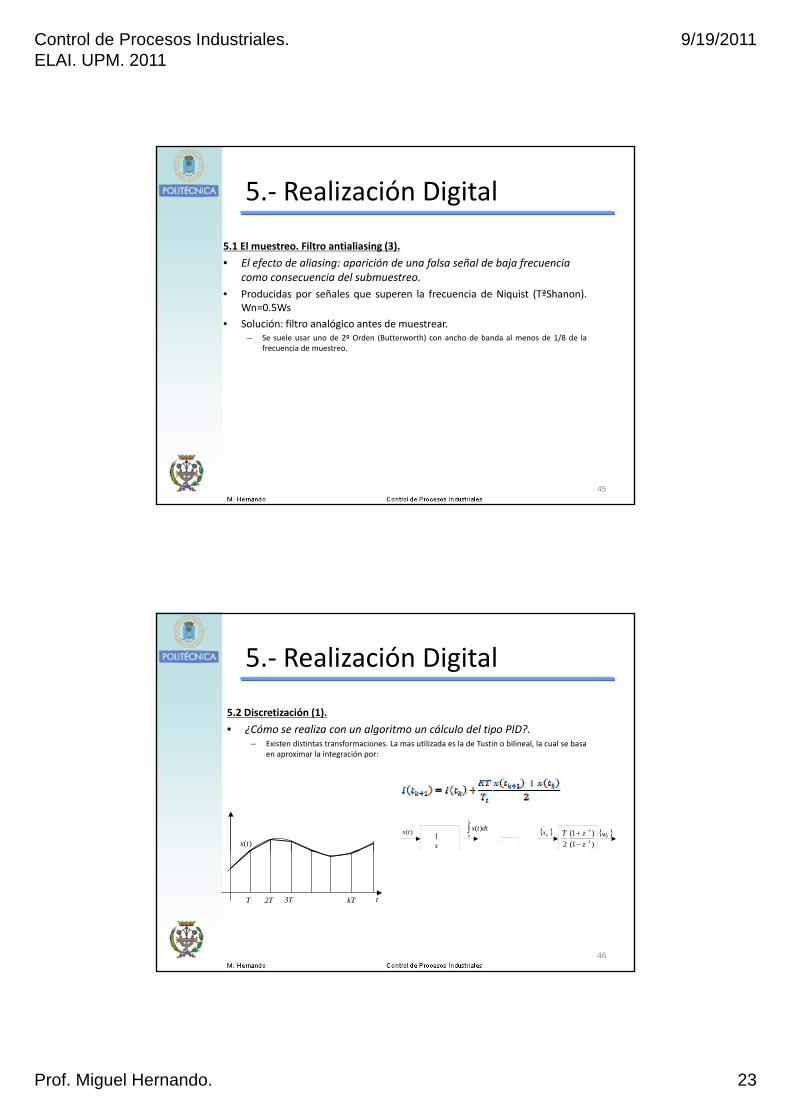
5.2 Discretización (1).• ¿Cómo se realiza con un algoritmo un cálculo del tipo PID?.
5.‐ Realización Digital
¿Cómo se realiza con un algoritmo un cálculo del tipo PID?. – Existen distintas transformaciones. La mas utilizada es la de Tustin o bilineal, la cual se basa
en aproximar la integración por:
)(tx)(tx ∫
t
dttx0
)( { }kx { }kws1
)1()1(
2 1
1
−
−
−+
zzT
46
T 2T 3T kT t
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 24
5.2 Discretización (2).
5.‐ Realización Digital
47
5.3 Cuantificación (1).
5.‐ Realización Digital
– Un ordenador tiene una precisión finita.– Codificación de números reales:
• Coma fija:• Coma flotante
– 32 bits– 64 bits
– Una precisión excesiva puede provocar que el cálculo acumulativo salga mal:
U j l ti l b d i i– Un ejemplo particular buscado a conciencia:
– Habitualmente quien es problemático es el término integral. Se puede arreglar ajustando su muestreocon un periodo mayor, para que el valor que se incrementa sea significativo.
48
Control de Procesos Industriales. ELAI. UPM. 2011
9/19/2011
Prof. Miguel Hernando. 25
Notas prácticas de uso del PID
6.‐ Notas Prácticas sobre el PID
• Empleo del PID:seguimiento fiable de los cambios de SP.insensibilidad al ruido.Buen comportamiento ante cambios de carga, perturbaciones.
• El PID funciona, en la mayoría de los casos, aceptablemente.
• En muchas implementaciones la acción D se desconecta.
á d l f ó• ¿ Cuándo emplear configuración PI ?En sistemas principalmente de 1er orden (control de nivel)En sistemas de orden superior siempre acción I para asegurar correcto funcionamiento en régimenpermanente.
49
Notas prácticas de uso del PID
6.‐ Notas Prácticas sobre el PID
• ¿Cuándo emplear configuración PID ?En sistemas principalmente de 2º orden (control de temperatura).En sistemas donde haya que incrementar la velocidad de respuesta y en sistemas de orden superior,mediante la adición de la acción D.
• ¿ Cuándo no usar PID ?
En sistemas de orden 3 o superior (control más sofisticado, el PID no basta, pero puede usarse).En sistemas con elevados tiempo muertos (predictor Smith).En sistemas con mas de un modo oscilatorio más de un polo complejo con parte real muy pequeñaEn sistemas con mas de un modo oscilatorio más de un polo complejo con parte real muy pequeña(adición de ceros complejos).
50





























