-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
1/30
1
Nadzor i regulisanje cestovnog saobraaja(I parcijala,
2014/2015)
PREDAVANJE 1.1. ta su tehnike i institucionalne komponente
Nadzora i upravljanja?
Tehnike komponente NIR-a su:
1. komunikacijske veze,2. sistemi za prikupljanje podataka,3.
informacijske platforme, itd.
Institucionalne komponente, kao to su:1. centar za upravljanje
tranzitom,2. centar za upravljanje saobraajem,
3. centar za upravljanje u sluaju opasnosti.
2. Definirati logiku i fiziku arhitekturu Nadzora i
upravljanja!Logika ili funkcionalna arhitektura izvodi se iz
specificiranih korisnikih zahtjeva i slui zaizradu fizike
arhitekture.
Logika arhitekturaje alat koji pomae organiziranju sloenih
elemenata sistema i njihovihrelacija, neovisno od tehnologije i
institucija koje sudjeluju u procesima i tokovima informacijau
sistemu.
Logika arhitektura prikazuje potrebne funkcijske procese i
tokove podat aka koji su potrebnida se zadovolje zahtjevi korisnika
odnosno usluge.
Fizika arhitektura definira i opisuje naine kojima dijelovi
funkcionalne arhitekture mogubiti povezani tako da formiraju fizike
entitete. Na najviem nivou fizike arhitekture funkcijesu na osnovu
slinosti grupisane u sisteme za koje se mogu definirati zajedniki
podaci ipostupci, te zajednike lokacije sistema.Mogu se definirati
4 sistema i to:
1. Sistem centra za upravljenje saobraajem2. Sistem
saobraajnica3. Sistem putnika4. Sistem vozila
Svaki od navedenih sistema moe dalje biti podijeljen na
podsisteme, tako se sistem centra
za upravljanje saobracajem sastoji od podsistema za upravljanje
saobracajem, upravljanjevanrednim situacijama, informiranje vozaca
i putnika i sl. Navedeni podsistemi se sastoje odvie funkcija koje
nisu meusobno neovisne
3. Koje su operativne zadae regulacije (upravljanja)
saobraajem?Kljune operativne zadae upravljanja saobraajem su:
1. Kontrola pristupa na mreu,2. Ublaavanje posljedica zaguenja
na saobraajnicama,3. Rjeavanje uskih grla zbog incidentnih
dogaaja,4. Postizanje zadovoljavajue razine sigurnosti u
saobraaju,5. Saobraajna logistika specijalnih dogaaja,6. Kontrola
ne povoljnih uticaja na odvijanje saobraajnog toka (vremenske
neprilike,
agresivna vonja, itd.),7. Preraspodjela prema koritenju
efikasnijih vidova javnog prijevoza.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
2/30
2
4. Objasniti razliku izmeu Individualnog i centraliziranog
voenja saobraaja.Individualno voenje saobraajapojavljuje se kod
osobnih automobila, autobusa. Voenjebitno ovisi o eksternim
iniocima i interakciji s drugim entitetima u saobraajnom
toku.Veliina razmaka izmeu saobraajnih entiteta, brzina i vrijeme
putovanja su varijabilni iovise o specifinimokolnostima.
Centralizirano regulisanje/voenje saobraaja praktino funkcionira
tako da nasaobraajnoj dionici postoji senzorska oprema koja
prikuplja podatke i odreuje upravljakodjelovanje kao priblino
deterministiko voenje. Vrijeme putovanja u javnom putnikomprijevozu
predeterminirano je voznim redom i odstupanja su minimalna ako nema
zaguenjasaobraaja.
5. Na koji nain se prikupljaju informacija sa
terena?Prikupljanje informacija sa terena to se u principu vri na
vie razliitih naina:
1. Uesnici u saobraaju2. Policija i radnici koji rade na
odravanju cesta3. Izvjetai sa lica mjesta4. Pozivi putnika putem
mobilnih telefona
Informacije se takoer mogu prikupljati i automatski pomou
senzora postavljenih nasaobraajnicama kao to su:
-Magnetni senzori,-Ultrasonni senzori,-Video
nadzor,-Radar,-infracrveni senzori,-Mikrotalasni,-Induktivni
senzori,-Piezoelektrini,
-Pneumatski,-Hidraulini i sl.
6. Navesti neke primjere NIR-a.Primjer 1. Gradovi Huston, Texas
i okolina Harris County su smanjili zastoje u saobraajuuvoenjem
fiber-optike mree i raunarski upravljane signalizacije, senzora
pored puta,video kamera, displeja sa promjenljivim sadrajem i
drugih sistema za detekciju problemakoji kontroliu protok
saobraaja.
Primjer 2. U St. Paul-u, vozila hitne pomoi mogu mijenjati
signalizaciju kako bi to prije stiglido ljudi koji su ozlijeeni ili
su u nevolji.Primjer 3. Countdown autobusni informacijski
sistem-(London) - Ovaj sistem uvezuje 400
autobusnih stanica te 1000 autobusa. Posjeduje: senzore za
automatsko lociranje autobusa,radijski predajnik i prijemnik svih
vanih podataka.
Primjer 4. Informacijski sistem u vozilu - Predstavlja sistem
koji omoguavavozau pristup internetu, kako bi dobio svjee podatke
o: stanju saobraaja,informacije o vremenu, informacije o
eventualnom zastoju.
Primjer 5. Smart Park (Pametno Parkiralite), Sistem Smart Park
prepoznaje, vri nadzor iupravlja ulazom i izlazom sa parkiralita.
Upotreba vjetake inteligencije, pomou naprednihraunara lahko
omoguava ove funkcije. Pospjeuje udaljeno regulisanje
parkiralitima,smanjuje trokove zaposlenih koji su potrebni za
upravljanje parkirangom. Za upotrebu
SmartPark koriste se kamere koje snimaju i prepoznaju
registracijsku tablicu vozila koje je
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
3/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
4/30
4
PREDAVANJE 2.
1. Definirati transportni sistem.Transport predstavlja skup
aktivnosti iji je cilj premjetanje robe i putnika s jedne pozicije
nadrugu.
Transportni sistemje skup meusobno povezanih elemenata
transporta koji ima zacilj uspjeno obavljenje premjetanja robe i
putnika s jednog mjesta na drugo. Osobine transportnog sistema:
- Dinamiki sistem,- Funkcije TS-a se ne mogu ostvariti bez da se
u njemu realizuju funkcije upravljanja,- TS je informacijski
sistem.
2. Opisati opti dijagram Transportnog sistema koji je zadat
sa:
Opi model je univerzalan, moe se primijeniti na TS zemlje,
transport u okviru nekeprivredne grane, na podsisteme u okviru
nekog veceg TS, sve do modela pjeaka usaobracaju. Analiza,
projektranje i regulacija u TS provode se uvijek na bazi razmatraja
ovogmodela.
Razmotrimo elemente ovog sistema :Transportni proces -
(transport po eljeznikoj pruzi, mrei pruga, na ulici
autoputu,kontenejrskom terminalu) odvija se prema propisanom i
uhodanom tehnolokomprocesu, prema redu vonje, odnosno prema planu
odvijanja procesa.Informacije - o stanju transportnog procesa
prenose se iz procesa do sistema za
upravljanje, na osnovi dobivenih informacija, na osnovu znanja i
normi (propisu,pravila,zakona) ovdje se donose odluke i nalozi za
akcije i zahvate koji se zatim provode usamom procesu. Ako doe do
poremeaja u samom procesu, proces se preko povratneveze dovodi u
propisano stabilno stanje. Isti je sluaj sa djelovanjem uticaja
okoline.
3. Na osnovu ega se definie kvalitet transportne usluge?Kvalitet
transportne usluge definie se preko sljedeih parametara:
1. Bezbjednost,2. Pouzdanost,3. Brzina (vrijeme odziva na
zahtjev),4. Komfor,5. Utjecaj okoline,
6. Transportni trokovi
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
5/30
5
4. ta podrazumijeva operativna regulacija?Operativno upravljanje
predstavlja regulaciju koja se provodi na vozilima i u
saobraajnomprocesu u cilju postizanja:
1. Maksimalne bezbijednosti kretanja,2. Maksimalne
pouzdanosti,3. Efikasnog koritenja sredstava i opreme.
Pod pojmom operativno upravljanje se podrazumjeva:1. Snimanje
kretanja svih vozila i usmjeravanje njihovog kretanja prema
odreditima
(pozivima na moru ili aerodromima, mjestima utovara i istovara
itd).2. Odailjanje informacija u operativne svrhe
Sredstva OU ukljuuju:1. Pravila i propise2. Standardne
operacione procedure3. Koritenje znakova, signala, snimaka i
izvjetaja
5. Objasniti vanost tehnikog interfejsa.Kako bi se postigla
mogucnost usuglaavanja radarazlicitih podsistemapotrebno je uvesti
nove tehnicke standarde na interfejsima. Tako da jeovdje jako bitno
objasniti neke od osnovnih standarda u NIR. To su:AASHTO, ITE,
SEA,IEEE,ASTM, NEMA.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
6/30
6
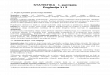
6. Objasniti principijalni rad sistema koji je dat sljedeom
slikom:
Informacijsko-komunikacijska terminalna jedinica prikuplja
informacije iz pojedinanihinformacijskih ureaja i sistema, odakle
se preko prenosnog komunikacijskog podsistemaiformacije alju do
centralne komunikacijske i upravljake jedinice koja je umreena
sasaobraajnim ekspertnm sistemom.
7. ta je standard, a ta protokol?Standardi prema Nacionalnoj
Politici Standarda u Sjedinjenim Amerikim Dravama iz
1979. godine., standardi se definiu kao propisani set pravila,
uslova i zahtjeva koji seodnose na definisane termine i
klasifikaciju komponenti, specifikaciju materijala, performancii
operacija te definisanje procedura ili mjerenje kvantiteta i
kvaliteta u opisanim materijalima,proizvodima, sistemima i
praksama.Protokoli protokol se definie kao set pravila ili
konvencija formulisanih za kontrolurazmjene podataka izmeu dva
entiteta koji ele da se poveu. Protokoli su potrebni kako bise
definisala razmjena kontrole nad informacijama izmeu korisnika
ureaja i mree.Osnovni elementi protokola ukljuuju formate podataka
i nivoe signala, koordinaciju kontroleinformacijama i upravljanje
grekama, kao i tajming.
8. Koji su kriterijumi za standardizaciju?
Kriterijumi za standardizaciju su:
1. Mogunost proirenja: nisu zatvoreni; omoguuje nadograivanje
kako bi pratilistalnu evoluciju u transportu informacija i kontrole
nad sistemom.
2. Interoperatibilnost: neovisna postrojenja; omoguava najveim
moguim tritimada se razvijaju.
3. Kompaktibilnost: bez preplitanja, mijeanja; vie ureaja u
istom sistemu morajubiti u mogunosti da operiraju bez uplitanja u
operiranje drugih ureaja.
4. Interpromjenjivost, zamjenjivost: neovisnost ponuaa; ureaji
razliitih ponuaakoji imaju iste funkcije mogu biti zamjenjeni.
5. Otvorenost: bez vlasnitva; omoguuje brz napredak novih
tehnologija iprihvatanje od strane korisnika istih.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
7/30
7
9. Ukratko objasniti vanost standardizacije.Razvoj standarda e
uiniti moguim visok stepen integracije novih naprednih
sistemaregulacije. Utemeljenje standarda ce omoguiti korisnicima
jednostavnije i jeftinijedograivanje njihovih sistema kako novi
dijelovi postanu dostupni. Razvoj nacionalnihstandarda bi trebao
popraviti prije svega dizajn proizvoda i performance, sigurnost,
i
pojednostaviti rukovanje i operacije.
Standardi bi takoer trebali poveati povjerenje korisnika zato to
bi novi proizvodi osiguralinjihovu vrijednost i bili bi jeftiniji
za nadograivanje kako novi add -on dijelovi budu dostupni.
Razvoj standarda je bio bitan faktor u brzom razvoju novih
proizvoda I servisa od stranesvjetskih komjuterskih i
telekomunikacijskih industrija u posljednjih nekoliko
desetljea.
Bitno je shvatiti vanost standardizacije zbog naina I mogunosti
upravljanja saobraajemsa aspekta da se ne desi da se razvijao
sistem koji nije standardiziran jer to moepredstavljati bacanje
novca. Sa druge strane moe dovesti i do nekompaktibilnosti
izmeuinfrastrukture u koju je jako puno uloeno a da vozila nisu u
stanju da prime niti jednu ododaslanih informacija.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
8/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
9/30
9
- Senzori za detekciju vremenskih uslova
5. Koje su prednosti i nedostaci koritenja kamera u
nadzoru?Prednosti ovih ureaja jesu sljedee:
- Mogunost nadgledanja podruja sa veim brojem saobraajnih
traka.
- Modifikacija zone detekcije tj.pokrivanja je jednostavna.-
Dostupnost velike koliine podataka.- Uz pravilno podeavanje
omoguavaju detekciju na irem podruju.- Povezivanjem kamera dobija
se pregledna slika odvijanja saobraaja du cijele
autoceste na kojoj su kamere postavljenene.
Slabosti ovih ureaja su:- Za instalaciju ovih ureaja potrebno je
postojanje ve postavljene odreene
infrastukture na cesti.- Utjecaj vremenskih uslova na rad ovih
ureaja je velik; u sluaju snijega, magle i
drugih vremenskih neprilika prikaz odvijanja saobraaja na cesti
je dosta degradiran usmislu kvalitete slike.
6. Objasniti razliku izmeu aktivnih i pasivnih IC
senzora.Infracrveni senzori se koriste za detekciju vozila i
njihove brzine. Dijele se na aktivne i
pasivne infracrvene senzore:
- Aktivni infracrveni senzori - emitiraju svjetlosni snop na
povrinu ceste i mjere vrijemepotrebno da se reflektirani signal
vrati do ureaja. Kada se vozilo nae na putulaserskog snopa vrijeme
koje je potrebno da se snop vrati je smanjeno. Ova
vrstainfracrvenog senzora ne moe raditi u loim vremenskim uslovima
jer kratka talasnaduina koja je emitovana ne moe prodrijeti kroz
snijeg i kiu.
- Pasivni infracrveni senzori - detektuju vozila na cesti
mjerenjem infracrvene energije
koja zrai sa podruja detekcijske zone. Vozilo e uvijek imati
temperaturu razliitu odokruenja tj.ceste. Mogunost interferencije
sa drugim ureajima je veoma malabudui da se radi o pasivnoj
tehnologiji. Ova vrsta senzora se postavlja na postolje ilina
postojei stub direktno iznad ceste. Njegov rad je nezavisan o
vremenskimprilikama.
7. Na kojem principu funkcionie mikrotalasni radar?Mikrotalasni
radar funkcionie na taj nain to se energija vozila transmituje
senzorima, te se pretvara u informacije saobraajnog toka,
vidljive za vozae. Postoje dvatipa mikrotalasnih radara. Oni koji
transmituju stalne talase i oni koji transmituju
frekvencijumoduliranih stalnih talasa, tzv. Doppler senzori.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
10/30
10
8. Objasniti princip rada induktivnih Loop senzora.
Induktivni loop (loop eng.strujna petlja) senzori rade na
principupojave struje u sluaju kada seodreeni elektrini provodnik
nae ublizini magnetnog polja. U posmatranjui mjerenju saobraaja na
cestamametalno vozilo predstavlja magnetnopolje a a induktivna
strujna petljaelektrini provodnik. Mjerna jedinica nacesti upravo
mjeri generirane signale(pojavu struje) koje nastaju
prelaskomvozila preko petlje.
Ova vrsta senzora se najeekoristi za brojanje automobila na
cesti ali i za mjerenje brzine svakog vozila. Ono to jenajvea
prednost ovakvih senzora jeste manji trokovi u odnosu na druge
vrste senzore(optiki, infracrveni i slino). No, to se nedostataka
induktivnih loop senzora tie, najvei odnjih svakako jeste kopanje
jednog dijela ceste kako bi se postavili to to negativno utjee
nakvalitet i vijek trajanja povrine ceste.
9. Na osnovu kojih metoda vrimo detekcija i biciklista?Postoji
nekoliko tehnologija koje slue za detekciju pjeaka i biciklist.
Neke
od tih tehnologija su:- Mikrotalasi,- Ultrazvuni i zvuni
detektori- Infracrveni detektori
- Video senzori- PiezoelektrikiSve ove tehnologije su jako dobre
u detekciji i razlikovanju pjeaka i biciklista, npr.mikrotalasni i
infracrveni detektori automatski detektuju prisustvo pjeaka u zoni
kojupokrivaju.
10. Navesti osnovne senzore za detekciju vremenskih uslova.
Osnovni senzori za detekciju vremenskih uslova su atmosferski
senzori koji mjere razliitevremenske prilike kao to su: temperatura
zraka, barometarski pritisak, vlanost zraka,brzinu vjetra,
vidljivost i praenje oblaka (intenzitet sunevih zraka). U te
senzore spadaju:
- Termometri- Barometri
- Hidrometri
- Vjetrokazi
- Kini instrumenti- Instrumenti za odrivanje vidljivosti-
Povrinski senzori
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
11/30
11
11. Na koji nain funkcionie sistem za detekciju odstupanja
smjera nasaobraajnicama?
Postoje dva sistema oznaka na cestama:- oznake sa kontrolnim
takama (Eng.-control point markers)- oznake za utvrivanje pozicije
(Eng.-position detection markers) koji slue za
detekciju bone pozicije vozila u odnosu na cestu.
Oznake sa kontrolnim takama su bazirane sa moduliranim
radio-valovima obuhvaenimantenom instaliranom ispod povrine ceste i
kontrolne jedinice smijetene na rubu ceste.Oznake sa kontrolnim
takama emitirajuimodulirane uskopojasne radio valove
omoguujuinformisanje vozila koji prolaze preko istih.
Oznake za utvrivanje pozicije su magnetne i postavljene su ispod
povrine saobraajnihtraka.
Oznake su postavljene u tri reda, na svakoj traci, na
udaljenosti od po 1m jedna od drugeu vidu su magnetnih ploa ili
manjih magnetnih dijelova tzv. cilindrinih magneta. Takopostavljene
oznake omoguuju detekciju bone pozicije vozila u odnosu na irinu
trake.
Udaljenost izmeu redova je 2m.
Kada magnetni senzori preu preko magnetne oznake na cesti,
kontrolna jedinicaidentificira senzor sa najjaim izlazom, te
koristei horizontalne i vertikalne pravcemagnetnog polja,
proraunava odstupanje izmeu magnetne oznake i senzora. Podaci
oodstupanju se zatim koriste za utvrivanje pozicije vozila u odnosu
na centralnu linijusaobraajne trake.
12. Na kojem principu radi Inteligentni sistem prilagoavanja
brzine ISA?Kao praktino rjeenje ISA sistema javljaju se posebno
ugraene pedale za smanjenjebrzine. Naime, pedala automatski
smanjuje brzinu vozaa i sprijeava daljnja poveanjabrzine kada ovaj
vozi brzinom veom od maksimalne dozvoljene. Naime, koritenjem
GPSsistema vozilo dobija potrebne informacije o svojoj poziciji. Na
osnovu svoje pozicije voziloseinformie o maskimalnoj dozvoljenoj
brzini na tom dijelu ceste koristei digitalnu mapu cesteugraenu u
vozilu.
13. Kako radi eksperimentalni sistem Platoon navigacije?
Platoon vozila se definie kao skup vozila na cesti koja putuju u
grupi,na jednakoj udaljenostijedno od drugog. Da bi platoon vozila
bio uopte ostvariv potrebno je da se vozila kreuistom brzinom i da
su automatski kontrolirana.
o Svako vozilo je opremljeno sa radarom koji mjeri udaljenost
vozila od onog ispredsebe.
o Putem radio komunikacija svako vozilo je informisano o brzini
i ubrzanju vozila ispred
sebe kao i vodeeg vozila.o U vozilima se nalaze i sistemi za
inteligentnu adaptaciju brzine tj. ISA.o U vozilu su smjeteni
senzori koji daju informacije vozilu o njegovoj poziciji u
odnosu
na ivice ceste.o U platoon sistemu omogueno je i naputanje
platoon -a od strane vozila ali i
ukljuivanje dodatnih vozila.
Vozilo koje eli da napusti platoon informira vodee vozilo u
platoon -u a zatim dobivadozvolu da se udalji od vozila ispred
sebe. Vozilo iza se takoer udaljava od odlazeegvozila, te ovaj
izlazi iz platoona i ide u susjednu traku.
U sluaju prikljuivanja vozila platoon sistemu,vozilo se
prestrojava u traku kojom se vozilaplatoon-a kreu te svoju brzinu
prilagoava njihovoj i tako postaje zadnje vozilo u platoon-u.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
12/30
12
14. ta ini komunikacijski sistem?Komunikacijski sistem ine:
- Krajnji korisnik aplikacija.- oprema u vozilu-oprema koja
omoguava komunikaciju korisnika i opreme na cesti.- oprema na cesti
koja je postavljena na rubu kolovoza i s koje seinformacije alju
ka
serveru kontrolnog centra na obradu te obraene informacije ka
vozilima.- server kontrolnog centra koji predstavlja jezgro
aplikacija, mjesto gdje se prikupljene
informacije o saobraaju pohranjuju i distribuiraju.
15. Objasniti nain funkcionisanja DSRC sistema i njegove
eventualne primjene?
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
13/30
13
PREDAVANJE 4.
1. Objasniti princip rada GPS-a!GPS (Eng. General Positioning
System) je sistem za pozicioniranje pomou satelita.Sastoji se od 24
satelita, 21 navigacionog i 3 rezervna. GPS prijemnik treba znati
dvijestvari ako namjerava raditi svoj posao. Mora znati GDJE su
sateliti (njihov poloaj) i KOLIKOsu DALEKO (udaljenost).
GPSprijemnik od satelita prikuplja dvije vrste kodiranih
informacija. Jedan tipinformacijasadre priblini poloaj satelita. Ti
se podaci kontinuirano prenose i spremaju umemoriju GPS-prijamnika
tako da on zna orbite satelita i gdje bi koji satelit trebao biti.
Svakisatelit moe putovati malo izvan orbite, pa zemaljska stanica
za praenje prati orbite satel ita,njihovu visinu, poloaj i brzinu.
Zemaljska stanica za praenje alje orbitalne informacijeglavnoj
kontrolnoj stanici, koja alje satelitima ispravljene podatke.
Podaci o poloaju satelitau bilo kojem trenutku nazivaju se podacima
almanaha. Kad je GPS-prijemnik "hladan", trebate mu malo due
vrijeme da pronae satelite. Prijamnik se smatra "toplim" kad su
podacisakupljani u posljednjih etiri do est sati. Pri izabiru koji
GPS -prijemnik kupiti, dobro je
pogledati specifikaciju vremena "hladnog" i "toplog" traenja
satelita..Kad GPS-prijamnik zna precizan poloaj satelita u
prostoru, jo treba znati koliko suoni daleko kako bi mogao odrediti
svoj poloaj na Zemlji. Postoji jednostavna formula kojakae
prijamniku koliko je pojedini satelit daleko:
Udaljenost od satelita jednaka je brzini emitiranog signala
pomnoenoj s vremenomkoje treba da signal doe do prijamnika (brzina
x vrijeme putovanja = udaljenost).
2. Zato je za precizno pozicioniranje neophodan signal iz
najmanje 3 satelita?GPS-prijemnik od satelita prikuplja dvije vrste
kodiranih informacija. Jedan tip informacija-
sadre priblini poloaj satelita.Ti se podaci kontinuirano prenose
i spremaju u memorijuGPS-prijamnika tako da on zna orbite satelita
i gdje bi koji satelit trebao biti. Svaki satelit
moe putovati malo izvan orbite, pa zemaljska stanica za praenje
prati orbite satelita,njihovu visinu, poloaj I brzinu. Zemaljska
stanica za praenje alje orbitalne informacijeglavnoj kontrolnoj
stanici, koja alje satelitima ispravljene podatke.
Podaci o poloaju satelita u bilo kojem trenutku nazivaju se
podacima almanaha. Kad jeGPS-prijemnik "hladan", trebat e mu malo
due vrijeme da pronae satelite. Prijamnik sesmatra "toplim" kad su
podaci sakupljani u posljednjih etiri do est sati. Pri izabiru koji
GPS-prijemnik kupiti, dobro je pogledati specifikaciju vremena
"hladnog" i "toplog" traenjasatelita..
Kad GPS-prijemnik zna precizan poloaj satelita u prostoru, jo
treba znati koliko su oni
daleko kako bi mogao odrediti svoj poloaj na Zemlji. Postoji
jednostavna formula koja kaeprijemniku koliko je pojedini satelit
daleko: Udaljenost od satelita jednaka je brzini emitiranog
signala pomnoenoj s vremenom koje treba da signal doe do
prijamnika (brzina x vrijemeputovanja = udaljenost).
d - Udaljenost satelita od zemlje
c - Brzina radio valova (brzina svjetlosti)
t - Vrijeme putovanja signala
d = c t
Mogua su dva poloaja u kojima se sijeku ove tri sfere., oni se
znatno razlikuju po koordinatama. Za odluku o tome koja od dviju
zajednikih taaka daje stvarni poloaj, trebate unijeti priblinu
visinu u GPSprijamnik. To e omoguiti prijemniku da izrauna
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
14/30
14
dvodimenzionalni poloaj (geografsku irinu i duinu). Nadalje, uz
pomo etvrtog satelita,prijamnik moe odrediti i trodimenzionalni
poloaj (geografsku irinu, duinu i visinu).Pretpostavimo da je
udaljenost od etvrtog satelita 18 000 kilometara. Sad imamo
situacijuda etvrta sfera sjee prve tri u jednoj zajednikoj
toki.
3. Pojasniti razliku izmeu GPS-a i diferencijalnog GPS-a?Kod
diferencijske korekcije (Differential GPS - DGPS). Koristi se jedan
fiksni prijemnik na
tano poznatim koordinatama koji inverznim algoritmom iz poznatih
koordinata raunaparametre signala kojeg bi sa satelita trebalo
primati te odailje korekcije okolnimprijamnicima (rover) koji ih
obino primjenjuju izravno na mjereni signal, jo prije raunanjaPVT
solucije. Bazne stanice za svaki vidljivi satelit mjere pogreku
odaslanog vremena ibrzinu njene promjene (dovoljno je odrediti
pogreku u obliku vremena - u to su ubrojene sveotklonjive pogreke,
sve dok je rover blizu baze pa signal s pojedinog satelita
podjednakogrijei do baze i do rovera). Time se uspjeno otklanja
namjerno kvarenje signala SA(Selective Availability), propagacijska
kanjenja signala na putu do prijemnika, pogreke
satelitskog vremena, kao i veina pogreaka orbite.
4. Koje su osnovne tehnike rada diferencijalnog GPS-a?
Tri su temeljne tehnike DGPS-a:
Dva su prijemnika na bliskim koordinatama, a trai se njihov
relativan poloaj Signal s jednogsatelita putuje odreeno vrijeme do
jednog prijemnika, a malo due do drugoga. Odredi li seta razlika i
ona primijeni u rjeavanju sistema jednaina za izraunavanje poloaja
dobivaserelativan poloaj tih dvaju prijemnika (single differencing
tehnika). Ovime je otklonjenapogreka satelitskog vremena, putanje
satelita i inosfere.Budui da prijemnici nisu savreno meusobno
sinhronizirani, pri mjerenju koliko signal dulje
putuje do drugog prijamnika u odnosu na prvi nastala je pogreka
ekvivalentna tomvremenskom razilaenju, ali jednaka za svaki
satelit. Uz dodatni satelit, matematikim jepostupkom mogue (jo
prije prorauna relativne udaljenosti prijemnika) nai i otkloniti
ovugreku (doubledifferencing tehnika)Ovaj se postupak koristi prije
statistikog usrednjavanja u cilju nalaenja cijelog brojaperioda
nosioca u faznom mjerenju. Postoji I tehnika zvana
triple-differencing koja koristeidva uzastopna mjerenja dvaju
satelita u potpunosti eliminie cjelobrojnu nesigurnost
periodanosioca (integer ambiguity) u sluaju bez privremenih
gubitaka satelitskog signala. Danasdaleko najraireniji standard
(format prenoenih korekcija) za SPS DGPS je RTCM SC -104,koji je
prvenstveno namijenjen primjeni u stvarnom vremenu I pokriva irok
spektar vrsta
DGPS mjerenja. Komercijalno dostupne usluge diferencijskih
korekcija obino se odailjukao RDS usluga pojedinih radio-stanica
ili u posebnom 300 kHz-nom pojasu (samo na
podruju Amerike). Za prijem tih korekcija potrebno je uz GPS
prijemnik imati i DGPSradioprijemnik, a postoji i velik
broj GPS prijemnika s ve ugraenim takvim radiom. Radio Technical
Commission forMaritime Services, Special Committe-104
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
15/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
16/30
16
Prednosti AVLa su: Povrat uloenih sredstava Bri rad dispeera
Sigurnost putnika i vozaa Sigurnost protiv krae
Navigacija Prijenos porukadigitalni sistem prenosa poruka
Izgradnja dinamikih ruta Optimizacija ruta
Dodatne sposobnosti
Servis za potroae Praenje vozila
8. Objasniti osnovnu razliku izmeu aktivnog i pasivnog praenja
vozila?Postoji nekoliko vrsta ureaja za praenje vozila. Meutim,
obino se dijele na pasivne iaktivne. Pasivni ureaji prikazuju GPS
lokaciju, brzinu, imaju zaglavlje i, ponekad, prekida
kao to je on/off taster, otvaranje/zatvaranje vrata. Kada se
vozilo vrati na unaprijedodreeno mjesto/taku, ureaj se uklanja
(vadi) i podaci se kopiraju i bivaju sauvani nakompjuteru i koriste
se za evaluaciju. Pasivni sistem ukljuuje automatsko skidanje
datotekagdje se podaci prenose beino.
Aktivnim ureajima se takoe sakupljaju iste informacije ali se
obino prenos podataka vri ustvarnom vremenu putem celularnih ili
satelitskih mrea na kompjuter ili podatkovni centar,za
evaluaciju.
9. ta predstavlja trite mogueg praenja vozila?
Povrat ukradenog vozilai privatna i komercijalna vozila mogu
biti opremljena sa RF ili GPSureajima kako bi policiji bilo
omogueno praenje i povrat. U sluaju LoJack, policija moeaktivirati
ureaj za praenje u vozilu i pratiti emitovane signale.
Upravljanje voznim parkom kod upravljanja voznim parkom, ako
znamo lokaciju svihvozila/vozaa u stvarnom vremenu mogue je
efikasnije zadovoljiti potrebe korisnika. Bilo dase radi o dostavi,
servisu ili drugim poduhvatima koji zahtjevaju vie vozila, vozai
samotrebaju mobilni telefon sa telefonskom ili internet konekcijom
da bi bili jeftino praeni iefikasno otpremljeni.
Praenje opreme (asset tracking) kompanije, zbog potrebe za
praenjem vrijednosti
imovine za osiguranje ili u druge svrhe kontrole sada mogu
ucrtati lokaciju opreme ustvarnom vremenu na mapi i paljivo pratiti
kretanje i radni status.
Upravljanje vanjskim/terenskim uslugama (field
servicemanagement) kompanije kojeimaju radnu snagu za pruanje
usluga kao to su popravka ili odravanje, mo raju kreiratiplan za
radno vrijeme, utvrditi raspored posjeta korisnicima i biti u
mogunosti rukovoditiovom slubom efikasno. Praenje vozila dozvoljava
kompanijama da brzo lociraju terenskoginenjera I uputiti ga do
najblieg korisnika ili da prue informacije o mjestu dolaska.
Praenje prikljunog vozila kompanije koje se bave transportom,
vuom i logistikomnerijetko rade sa teretnim vozilima i odvojivim
jedinicama za prevoz tereta. Dio vozila
namjenjen za vuu tereta poznat je kao cab- koija,kola a onaj za
prevoz terta (vueno
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
17/30
17
vozilo) naziva se prikolica. Postoje razliite vrste prikolica
koritenih za razliite prevoze npr.kamp-prikolica, hladnjaci
itd.
10. Koja je osnovna upotreba GPS kod upravljanja flotom
vozila?
Upravl janje voznim parkom kod upravljanja voznim parkom, ako
znamo lokaciju svih
vozila/vozaa u stvarnom vremenu mogue je efikasnije zadovoljiti
potrebe korisnika. Bilo dase radi o dostavi, servisu ili drugim
poduhvatima koji zahtjevaju vie vozila, vozai samotrebaju mobilni
telefon sa telefonskom ili internet konekcijom da bi bili jeftino
praeni iefikasno otpremljeni.
11. Navesti neke od primjena GPS sistema u saobraaju.Sistem
posjeduje razne vrste izvjetaja:HISTORY REPORT SAMPLE (primjer
historijskog izvjetaja) historijski izvjetaj pruamogunost brzog
pregleda historije voznog parka u toku odreenog perioda, vremenski
do 6mjeseci, sa dodatnih arhiviranih podataka za 12 mjeseci.
STOP REPORT SAMPLE (Primjer izvjetaja o zaustavljanju) -
korisniku prua brz pregledsvih zaustavljanja kojeg su napravila
vozila za odreeni period.
IDLE REPORT SAMPLE (Primjer izvjetaja o stanju mirovanju vozila)
-korisnicima pruapregled vremena i lokacija vozila iz voznog parka
koja ne rade motor radi i vozilo je ustanju mirovanja/ne kree
se.
12. Pojasniti princip rada digitanih mapa.
Upotrijebljen je veliki kapacitet DVD-ROM-a da bi se velikom
koliinom
podataka uspjelo pojednostaviti snalaenje. Sada itava zapadna
Europa* stane najedan disk, to nam omoguuje da se vozite diljem
kontinenta bez izmjene diskova.Tako se, na primjer, moetmo voziti
od Madrida do Berlina ili od Pariza do Rima,proraunati itavu rutu
-ak isplanirati zanimljiva mjesta na kojima emo sezaustavititijekom
puta - i pritom ne brinuti o tome koji se disk nalazi u ureaju.
Digitalne mapesadre informacije o rutama, saobraajnim mreama,
rastojanjima na odreenomprostoru, te algoritme za rjeavanje
odreenih problema prema ukucanimparametrima i kriterijima.
U dananje vrijeme se sve vie susreemo sa problemom odabira
najkraegputa. Odabirom najkraeg puta uveliko se vri uteda energije,
novca i vremena. Uovome nam uveliko pomau razliiti navigacijski
ureaji, koji implementiraju GPS i
GIS sisteme. Nakon to prime konkretne podatke, navigacijski
ureaji putem razliitihalgoritama rjeavaju problem, te na osnovu
dobijenog rjeenja i uz primjenu digitalnihmapa koje su dio GIS
sistema korisniku nude optimalno rjeenje. Sada se u pozadinirutnog
vodia izvri algoritam prorauna koji izbaci optimalnu putanju po
kriteriju kojiodabere korisnik.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
18/30
18
PREDAVANJE 5.
1. ta je sistem?U optem sluaju :
SISTEM predstavlja izdvojenu funkcionalnu cijelinu sastavljenu
od skupa objekata,njihovih utvrenih svojstava (atributa) I skupa
relacija koje povezuje te objekte i njihovasvojstva.
Malo optije : SISTEM predstavlja ureenu cjelinu koju sainjavaju
elementi (objekti, pojmovi,injenice) izmeu kojih postoje ili se
mogu uspostaviti uzajamni odnosi. kao ogranienacjelina je
apstraktna tvorevina ljudskog uma, poto ovjek ne moe (teko da
moe)shvatiti beskonanost.
2. Kako se vri : Formiranje ljudskog znanja ? UOAVANJE PROBLEMA
I UPOZNAVANJE S NJEGOVOM SUTINOM
ovjek je upuen na izdvajanje I omeivanje problema u okvire
mogunosti njegovihmisaonih aktivnosti tj. formiranje cjeline
otrgavajui je od okruenja.
ANALIZA SVIH ELEMENATA I NJIHOVIH UZAJAMNIH ODNOSA RELEVANTNIHZA
PREDMET SPOZNAJE
Elementi se nabrajaju, odbacuju irelevantni, razvrstavaju po
stupnju njihovog znaaja.
VERIFIKACIJA POSTAVLJENE TEORIJE NA BAZI MISAONOG ILI
FIZIKOGEKSPERIMENTA
Verificira se implikacija ove teorije; Konanu ocjenu teorije
daje praksa
POVEZIVANJE SVIH RELEVANTNIH ELEMENATA (INJENICA) U
JEDNISTVENU
CJELINU TJ. FORMIRANJE MISAONOAPSTRAKTNOG SISTEMA
KOJIPREDSTAVLJA ZAOKRUENU CJELINU SA KOJOM SE MOE
OBJASNITIIZUAVANJE POJAVA (Stvaranje hipoteze ili teorije)
3. ta treba zadovoljavati sitem da bi bio kibernetiki i
objasniti potrebu zasvakom od osobina.
Kibernetiki sistemi:1. dinamiki Inae upravljanje nebi imalo
smisla2. sloeni Inae upravljanje nebi bilo prijeko potrebno3.
probabilistiki Inae upravljanje nebi bilopotrebno (nema izbora
=>ne moe biti niupravljanja )4. s povratnom vezomInae bi
upravljanje bilo gotovo nemogue
5. upravljani K-ka po kojoj se formira itava klasa sistema, ali
KIB sistemi morajuzadovoljiti i etiri gornja uvjeta
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
19/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
20/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
21/30
21
Sistem prioriteta za vozila hitne pomoi omoguava vatrogasnim
vozilima i vozilima hitnepomoi da obavljaju svoje zadatke koristei
regulacija saobraajnim sistemima sabeinim komunikacijama
instaliranim u raskrsnice i u automobile hitne pomoi ilivatrogasne
slube.
Dok se vozilo hitne pomoi pribliava semaforu, saobraajni
signalni kontroler ga
detektuje pomou svjetla, radiotalasa ili zvuka.Tada normalni
ciklus na semaforu koga ine zeleno, uto i crveno svjetlo moe
bitiprekinut i svjetlo promjenjeno u zeleno. Na ovaj nain se
omoguava nesmetan prolazvozilima hitne pomoi da u najkraem moguem
vremenu stignu na odredite.
regulacija adaptivnim signalima (Eng.- Adaptive Signal
Control)Sistem regulacije adaptivnim signalima koordinira kontrolu
saobraajnih signala krozsignalnu mreu, podeavajui duine faza
signala zasnovanih na preovladavajuemsaobraajnom stanju.
Napredni sistem signala (Eng.- Advanced Signal Systems)
Varijabilno smanjenje brzine (Eng.- Variable Speed
Limits)Varijabilno smanjenje brzine se definie kao smanjenje brzine
na osnovu vrste puta,vremenskih uslova i saobraaja. Sistem
varijabilnog smanjenja brzine koristi senzore zanadgledanje,
praenje saobraaja i/ili vremenske uslove. Ovaj sistem mijenja
ogranienjabrzine u realnom vremenu.
Biciklisti i pjeaci u saobraaju (Eng.- Bicycle &
pedestrian)Detektovanje pjeaka i biciklista moe uveliko poveati
sigurnost, udobnost I efikasnosttransportnog sistema.Postoji
nekoliko tehnologija koje slue za detekciju pjeaka i biciklist.Neke
od ve pomenutih tehnologija tehnologija su:
o Mikrotalasio Ultrazvuni i zvuni detektorio Infracrveni
detektorio Video senzorio Piezoelektrikio Posebni (specijalni)
dogaaji (Eng.- Special Events)
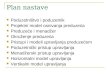
5. Objasniti rad sistema prioriteta tranzitnih signala kao na
slici.
Npr. Neki sistemi daju trajno zeleni signal za javna transportna
vozila kada je to neophodno.
U prvoj fazi autobus se pribliava dionici puta na kojoj se
nalazi taka Pd. Ta takapredstavlja taku detekcije. U sljedeoj fazi
bitnu ulogu ima generator prioritetnog zahtjeva(Eng.- The Priority
Request Generator). To je ureaj koji je obavjeten od strane
dolazeegautobusa i alarma kontrolnog saobraajnog sistema da vozilo
treba da dobije prioritet.
Sistem obrauje zahtjev i odluuje da li da prui prioritet prolaza
zasnovan na definisanimzahtjevima. Saobraajni kontroler 'C' pokree
akciju pruanja prioriteta zasnovanu na
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
22/30
22
definisanoj kontrolnoj strategiji prioriteta. Obino, ako je za
dolazee vozilo ve zelenosvjetlo, kontroler e samo
produiti trajanje zelenog svjetla za to vozilo. U sluaju da je
na semafo ru crveno svjetlo zadolazee vozilo, kontroler e dati
zeleno svjetlo dolazeem vozilu i ono e trajati sve dok
vozilo ne proe sigurno.
Kada autobus prolazi kroz raskrsnicu u tai Pc se detektuje da je
autobus proao i tainformacija se alje saobraajnom kontroleru.
Poto je obavjeten da je autobus proao raskrsnicu kontrolor 'C'
se vraa u normalno stanjerada.
6. Na kojem principu radi sitem za prioritet vatrogasnih i
vozila hitne pomoi?Sistem prioriteta za vozila hitne pomoi omoguava
vatrogasnim vozilima i vozilima hitnepomoi da obavljaju svoje
zadatke koristei regulacija saobraajnim sistemima sa beinim
komunikacijama instaliranim u raskrsnice i u automobile hitne
pomoi ili vatrogasne slube.
Dok se vozilo hitne pomoi pribliava semaforu,saobraajni signalni
kontroler ga detektujepomou svjetla, radiotalasa ili zvuka. Tada
normalni ciklus na semaforu koga ine zeleno,uto i crveno svjetlo
moe biti prekinut i svjetlo promjenjeno u zeleno. Na ovaj nain
seomoguava
nesmetan prolaz vozilima hitne pomoi da u najkraem moguem
vremenu stignu naodredite.
Prednosti ovog sistema se ogledaju u poboljanju sigurnosti,
smanjenju vremena potrebnom
za dolazak na odreenu poziciju i smanjenju trokova. -Danas su u
upotrebi mnogetehnologije prioriteta za vozila hitne pomoi
ukljuujui svjetlosne, infracrvene, zvune, radioemiter ili detektor
sisteme.
Svjetlosni i infracrveni sistemi koji se koriste kao emiteri se
montiraju obino na krov vozilahitne pomoi i automatski su povezana
sa svjetlimahitne pomoi. (Sl.4). Emiter se sastoji odsvjetlosnog
ureaja I snadbjevaa snagom koji je smjeten u unutranjosti vozila.Ta
svjetlaomoguavaju povratnu informaciju za vozaa hitne pomoi da je
zahtjev za prioritet primljen ida e biti prosljeen lokalnom
tranzitnom prioritetnom protokolu
Na zvuku bazirani sistemi koriste sirene hitne pomoi kao
emitere. Oblik signala sirene je
uitan u detektor. Jednom detektovan signal sirene je
verifikovan, zahtjev za prednost jeobraen I poslan signalnom
kontroleru. Radio sistemi koriste prijemnik sa
omnidirekcionomantenom da detektuju digitalno kodirani raspreni
spektar ili uski opseg radio prenosa odvozila hitne pomoi.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
23/30
23
7. Od ega je sastavljen Sistem regulacije adaptivnim signalima
?Sistem regulacije adaptivnim signalima koordinira kontrolu
saobraajnih signala krozsignalnu mreu, podeavajui duine faza
signala zasnovanih na preovladavajuemsaobraajnom stanju.
Sistem je sastavljen od sljedeih komponenti: Nadzorni
sistem,
Identifikator vozila,
Procjena stanja kanjenja i plana, Optimizacija signalnog
vremena,
Regulacija saobraajnim signalima.
8. ta su Komponente sistema varijabilnog smanjenja
brzine?Komponente varijabilnog smanjenja brzine su:
Detektori saobraaja i brzine
Varijabilni znakovi brzine Mikroprocesor
Komunikacije
Senzori za okoli Bazna stanica za biljeenje promjena ogranienja
brzine
9. Kada se koristi sistem za varijabilno smanjenje brzine?
Varijabilno smanjenje brzine se primjenjuje u sljedeim uslovima:
Ope varijabilno smanjenje brzine Zimski i nepovoljni cestovni
uslovi
Magla
Zaguenje na cesti Radovi na cesti
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
24/30
24
10. Objasniti na kojem principu radi sistem za optimizaciju dat
na sljedeoj slici :
Analiza efikasnosti
Podaci iz senzora se prenose na raunar. Na osnovu ovih podataka,
modela koji simulira
odvijanje saobraajnih tokova u datoj mrei, te usvojenje
kriterijumske funkcijeprocijenjuje se efikasnost ovog sistema.
Ukoliko je efikasnos optimalna, ne vri seintervencija na sistem,
nego se obavlja postupak skeniranja podataka iz senzora.
Lokalna reoptimizacija
Ako je optimalni reim naruen, vri se ispitivanje da li je
poremeaj lokalnog karaktera,odnosno na nivou individualne
raskrsnice. Ako jeste, vri se lokalna reoptimizacija,
kojapodrazumjeva intervenciju (regulacija) na nivou duine ciklusa,
splitova i offseta naodgovarajuim individualnim raskrsnicama mree.
Efekat intervencije mora biti povoljan iza cijeli sistem.
Reoptimizacija mreeAko smetnja nije lokalnog karaktera, vri se
reoptimizacija sistema u cijelini. Ukoliko jeidentifikovana
situacija, unaprijed planirana, primijenjuje se ve definirani
planintervencije, a ako identifikovana situacija nije unaprijed
planirana, vri se on -linereoptimizacija. Na osnovu tehnike
simulacija i metode matematikog programiranjaraunaju se nove
vrijednosti za splitove, offsete i ciklus za sve raskrsnice
mree.
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
25/30
25
11. ta je funkcija adaptivnih algoritama?ADA adaptivni algoritmi
omoguavaju automatsku regulacijui optimizaciju saobraaja urealnom
vremenu bez prisustva ovjeka. ADA algoritmi se na jednostavan nain,
kaoprogramski moduli, implementiraju u ureaje I sustave.Poetni
prometni podaci za regulacija i optimizaciju se prikupljaju I
obrauju putem
raunarskih sustava, na osnovu kojih se, u suradnji sa prometnim
slubama, odabiruodgovarajui ADA algoritmi, izvodi njihovo
konfiguriranje i parametriziranje teimplementiranje u semaforske i
ostale ureaje i sustave.
ADA algoritmi preuzimaju automatsku regulaciju i optimizaciju
prometa na nivou krianja,poteza, zone odnosno cijelog podruja
obuhvata. Prometni dobici mogu biti i do 30% uz vrlokratko vrijeme
povrata ulaganja.
12. Na kojem principu radi ADA algoritam za -Automatsku
prilagodbu
meteorolokim uslovima?
Automatska prilagodba meteorolokim uvjetima: Uvjeti za odvijanje
prometa se mijenjajuovisno o aktivnim vremenskim prilikama.
Efikasnost regulacije saobraajem moe se bitnopoveati uvoenjem
automatske adaptacije trajanja zelenih i zatitnih vremena prema
prematrenutnim uvjetima (snijeg, kia, poledica, ...). ADA-VARIANT
algoritam iz odgovarajuihmjernih stanica prima podatke o trenutnim
uvjetima na prometnicama te odreuje nainregulacije radom krianja.
Implementacijom ADA-VARIANT algoritma znaajno se poveavasigurnost
uesnika u prometu.
13. Koje su Glavne zadae Parkirnog sistema informisanja i
navoenja?Glavne zadae Parkirnog sistema informiranja i navoenja su
: Pruanje informacije vozaima o slobodnim parkiralinim mjestima,
Voenje vozaa da odabrane lokacije, Pomo vozaima koji ne poznaju
gradsku mreu prometnica da lake i bre stignu do
odreene lokacije (koja ne mora biti iskljuivo vezana za
parkiranje), Smanjenje koliine prometa uzrokovanog traenjem
slobodnog parkiralita I time
direktno poveanje kvalitete ivljenja u gradskoj zoni, Smanjenje
koliine prometa u centralnoj gradskoj zoni ranim izdvajanjem
motornog
prometa upuivanjem vozaa na koritenje Park&Ride sustava (u
sluaju postojanjatakve mogunosti)
Bolje iskoritenje parkiralinih kapaciteta.
14. Objasniti koje su prednosti i nain rada sistema za
automatsku naplatucestarine?Elektroniki sistemi za naplatu
cestarinaKlasini sistemi naplate naknade za koritenjecestovne
infrastrukture su veoma teko primjenjivi u zemljama sa velikim
protokom vozila, jerzahtjevaju prekidanje prometnog toka, to za
posljedicu ima:
Gubitak vremena,
Smanjenje udobnosti i produktivnosti prijevoza,
Stvaranje zaguenja i zastoja.
Da bi se takve posljedice izbjegle pristupilo se izradi sistemaa
kod kojih se prometni tok neprekida, ve se naplata vri
automatizirano primjenom najsavremenijih dostignuainformacijskih i
telekomunikacijskih tehnologija. Primjeri takvih sisustava su
vidljivi u
Njemakoj, Austriji, vicarskoj (naplata koritenja autoputeva) i
Londonu (naplata ulaska uui centar grada).
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
26/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
27/30
27
16. ta je funkcija Sistema za nadzor vozaa?Ovi sistemi kontroliu
vozaa i upozoravaju ga u sluajevima kada on nije u stanju
dapravilno upravlja vozilom (npr. usljed umora). Vozaa mogu
nadgledati kamere isenzori.Nekoliko varijacija gore navedenih
funkcija su mogue:
Stepen podrke: od informativne (upozoravajue) do savjetodavne
i/ili aktivne
podrke pa sve do potpunog preuzimanja kontrole, Stepen
autonomije vozila: od potpune autonomije vozila (to znai da vozilo
moe
obavljati funkcije podrke vozau bez upotrebe vanjske
infrastrukturne inteligencije)
pa do potpuno vanjskog regulacije vozilom
Upotreba specifinih ciljnih korisnika (policijska vozila, vozila
hitne pomoi, vozila
javnog prijevoza, taxi vozila, auto leasing kompanije)
Prilagodljivost raznim uslovima i tipovima cesta (glavna putna
mrea, sporedna putna
mrea, naseljena podruja) Vrsta vozila (kamioni, kombiji, putniki
automobili).
17. Da bi bili funkcionalni ADA sitemi bi trebali da?
Deset pravila ADA sistema :
Sistemi za podrku vozau bi trebali : Biti podrka vozau kao
virtuali kopilot. Poveati njegov autoritet i kompetentnost. Ouvati
suverenitet vozaa svojom podrkom a ne kontrolisanjem vozaa. Biti
dizajnirani tako da voza moe poboljati njihovo funkcioniranje ako
je potrebno. Biti dizajnirani tako da ih voza moe aktivirati i
deaktivirati.
Biti transparentni sistemi sa visokim performansama Pruati pomo
kada je ona potrebna u roku od par sekundi. U stanju da dre vozaa
na srednje-aktivnom nivou tj. da se voza ne bi ni
opreopteretio a ni postao nepaljiv. Multifunkcionalni sistemi za
pomo vozaima ne bi smjeli imati funkcionalne greke. Inenjeri bi
trebali omoguiti jednostavnu upotrebu sistema za pomo vozau
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
28/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
29/30
-
8/10/2019 Nadzor i Regulisanje CS - Prva Parcijala (FSK)
30/30
8. Za ta se koristi kratka isprekidana linija?Kratka isprekidana
linija slui za razdvajanje jednosmjernih kolovoznih povrina
nasaobraajne trake na prilaznim kracima raskrsnice, kao linija
vodilja u samojraskrsnici i za odvajanje trake za vozila javnog
prevoza putnika kada se koristi samo
u odreenim vremenskim intervalima u toku dana.
9. Za ta se koristi iroka isprekidana linija?iroka isprekidana
linija slui kao ivina linija za razdvajanje tokova u
raskrsnici,putevima van naselja i kao ivina linija za izdvajanje
nia za skretanje i izlivanje,odnosno ulivanje na auto-putevima i
putevima rezervisanim za saobraaj motornihvozila.
10.Koje su vrste poprenih oznaka?Postoje sljedee vrste poprenih
oznaka:
- Linija zaustavljanja,
- Linije kojima se obiljeavaju mjesta na kojima vozai moraju
ustupitiprvenstvo prolaza,
- Kosnici- Pjeaki prijelazi- Prijelazi za bicikliste-
Graninici
Poprene oznake su, s obzirom na ugao pod kojima ih voza vidi,
ire od uzdunihoznaka.
11. Za ta se koriste kosnici?Kosnicise koriste za obiljeavanje
otvaranja ili zatvaranja izlivnih i ulivnih voznihtraka u zonama
denivelisanih raskrsnica ili posebnih traka za vozila javnog
gradskogprevoza. Razlikuje se geometrija kosnika koji se
primjenjuju kod gradskih autoputeva(GA) odnosno zatvaranja uliva
denivelisanih raskrsnica i geometrija kosnika kodotvaranja i
zatvaranja posebnih traka rezervisanih za vozila javnog
gradskogprevoza.